深部地质钻探中智能勘查自动控制系统设计及应用
2020-02-25林天祥
林天祥
(中国建筑材料工业地质勘查中心黑龙江总队,黑龙江 哈尔滨 150040)
在深部地质进行智能勘查的过程中,若出现勘查控制偏度系数高的问题,会严重影响后续深部地质钻探工作的精准性,进而形成安全隐患。在我国,针对自动控制系统的研究中,尽管研究起步较早,但对基数较大且大部分被分散存储的勘察信息进行精准控制具有很高的难度系数,导致研究普遍存在局限性,很难在真正意义上实现自动精准控制[1,2]。提高智能勘查信息的精准度一直是深部地质钻探中的重点,因此,智能勘查自动控制系统应运而生。智能勘查自动控制系统作为对智能勘查进行自动控制的重要手段,已经成为了有关部门的调研重点。为解决深部地质钻探中智能勘查自动控制精度低的问题,本文通过对深部地质钻探中智能勘查自动控制系统进行优化设计,致力于提高深部地质钻探中智能勘查自动控制精度。
1 深部地质钻探中智能勘查自动控制系统硬件部分
综合深部地质钻探区域内的现场环境,在系统硬件方面设计了工控机、数据采集卡以及显示器。同时,配备硬盘、键盘、鼠标等一些基本硬件,但这些基本硬件不作为此次研究重点,以下将对上文提出的三个核心硬件进行详细描述。具体研究内容,如下文所述。
1.1 工控机
将主控制芯片作为工控机设计的核心部分,对系统进行硬件设计。工控机的主要组成包括:主控制芯片、CPU、传感器以及显卡等[3]。在对主控制芯片的型号进行选择时,应根据主控制芯片的功能需要、接口处资源、深部地质钻探的工业性、尺寸大小以及功率消耗等相关因素选择。针对上述要求,本文选择将型号为ZW245V25-27 的主控制芯片引入到工控机设计当中。ZW245V25-27 主控制芯片各项参数配置要求,如表1 所示。
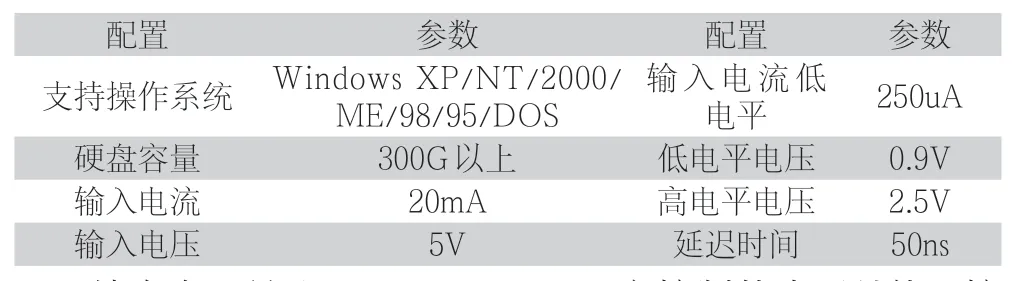
表1 ZW245V25-27 主控制芯片各项参数配置要求
结合表1 所示,ZW245V25-27 主控制芯片可以使工控机的各项性能达到最佳,并且在一定程度上节省系统汇总硬件的运行时间,同时节约成本。ZW245V25-27 主控制芯片主要控制多个电路的通断以及对智能配电的速度调节,因此具有更高的控制能力。工控机主要用于为深部地质钻探提供驱动,其主要电路是由MOSFET 金属-氧化物半导体场效应晶体管和高速光耦共同构成,驱动形式为脉冲宽度调制驱动,从而让深部地质钻探获得自由的智能勘查调速。
1.2 数据采集卡
数据采集板卡主要是为智能勘查自动控制系统提供数据支持,对工控机中得到的智能勘查自动控制数据进行综合采集。根据智能勘查自动控制系统设计需求,采用型号为HYVJ-KIBI152 数据采集板卡进行数据采集。该数据采集办卡性能高,且数据采集速度较快,通过一个2 路六位模拟量输入模块,对智能勘查自动控制数据进行采集,通过ISA总线使服务器与数据采集板卡互联,即可控制数据采集板卡运行。
1.3 显示器
设计显示器作为智能勘查自动控制系统运行结果的展示界面,将数据采集板卡采集到的智能勘查自动控制数据以及深部地质钻探工程监控参数在显示器上显示。本文共设计2 台显示器,型号均为CFR2548,尺寸为32 寸。每台显示器共有20 路,通过串口通讯能够直接获得智能勘查自动控制数据。通过Sucount K 网络与下层控制主机相联。显示器的硬件环境配置,包括: 2Mbpspc 端各类型浏览器及移动端各类型浏览器,类型为带宽可支持浏览器。
2 深部地质钻探中智能勘查自动控制系统软件部分
根据智能勘查自动控制系统软件的开发环境,为实现系统的自动控制功能,将系统软件部分分为三步进行设计,以下将对系统涉及软件部分内容进行详细说明。
2.1 控制数据自动采样处理
利用计算机自动获取每一个端口当中的智能勘查自动控制数据信息,完成对控制数据的自动化采样。在深部地质钻探过程中,必然会存在一部分无效的数据样本,为了避免系统出现无效控制,采用虚拟专网技术与集控中心连接,对远程智能勘查自动控制命令进行数字签名,由配电室CHub-68 通讯管理的方式确保远程操作安全可靠。
2.2 智能勘查控制当量计算
获取深部地质钻探中智能勘查自动控制数据后,计算智能勘查控制当量。计算时,首先给工控机一个已知的数值,利用该数值,自动给出系统一个原始恒定的运行速度,待工控机运行一段时间后,通过改变这一定值,计算相关当量自动控制智能勘查的速度。设智能勘查控制当量为W,可得公式(1):

公式(1)中,K 指的是工控机在实际运行过程中的比例系数;x 指的是系统自动采样次数,为实数;f(x)指的是当系统第x 次自动采样时与实际定量之间的偏差;j 指的是控制误差比例系数。利用上述公式计算出智能勘查控制当量,为控制当量映射提供数据支持。
2.3 智能勘查控制当量映射
得到智能勘查的控制当量后,利用计算机接口实现控制当量的映射,映射出两个4 位数的8 进制数,最终获得在每个控制点位上的自动控制数据,再利用特定的变量数据对深部地质钻探中智能勘查控制数据映射,形成区域性的映射。控制当量映射是将用户在系统当中输入的智能勘查控制信息转换为具体的参数控制,用户只需事先将规定的智能勘查控制限制输入到系统当中,通过系统自动检测是否进行控制参数的改变。
3 实例分析
3.1 实验条件
本次实验选择某矿山作为实验对象,该矿山正处于深部地质钻探工程开展中,钻探施工区域地下深度最深可达1500m,岩层倾向156°~186°,倾角在56°~69°左右,线路沿线没有断层通过,岩体受应力作用相对微弱,且岩体层面层间结合较差,存在薄层状泥化现象。本次实验将控制偏度系数作为实验测试指标,控制偏度系数越低证明该控制系统的控制精度越高。分别使用传统控制系统以及本文设计控制系统进行实验,设置传统的控制系统为对照组,本文设计控制系统为实验组。在此次的实验中,设置实验时间为7小时,记录实验结果。
3.2 实验结果与分析
根据实验结果得出两种控制系统的控制偏度系数,具体结果如图1 所示。
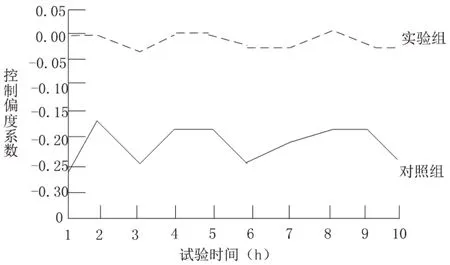
图1 控制偏度系数对比图
通过图1 可得出如下的结论:本文设计的控制系统在相同的测试时间中控制偏度系数相较于对照组更低,控制精度更高,能够实现深部地质钻探中智能勘查精准自动控制。
4 结语
通过深部地质钻探中智能勘查自动控制系统设计,能够取得一定程度上的研究成果。通过实验证明设计控制系统已经实现了自动化,同时控制偏度系数得到有效降低。通过对控制系统的优化设计能够提高智能勘查精度,为深部地质钻探中的智能勘查带来巨大的经济效益,具有较大的发展潜力。在后续的研究中还将加大设计控制系统在实际中的应用力度,从而实现深部地质钻探中智能勘查的高精度自动控制。
