一种室内自主导航运输机器人*
2020-02-25李才亮杨芳许敏柔
李才亮,杨芳,许敏柔
一种室内自主导航运输机器人*
李才亮,杨芳,许敏柔
(广东海洋大学 机械与动力工程学院,广州 湛江 524000)
近年来,机器人技术飞速发展,已被各领域广泛应用,极大方便了人们的工作和生活。拟设计一种室内自主导航运输机器人,不仅可将室内小型物件置于机器人中实现自主精确导航规划运输,还可实现自主导航、自主避障,提高应对突发事件的能力,并具有较好的人机交互性能,可以实现日常生活工作中的室内小型物件高效运输。
室内小型物件;自主导航;运输机器人;中央控制模块
1 引言
近年来,随着机器人技术的飞速发展,该技术已经被应用到越来越多的领域,极大方便了人们的工作和生活[1-2]。目前,物流运输机器人主要应用于大型仓储物流作业和大型室外运输作业,而室内物流运输机器人却鲜有涉及,市场空缺较大。
另外,现有的室内运输物流机器人大多只能提供功能单一、具有特定轨迹的定位运输,一般只能按照预先设定的命令完成任务,缺乏解决突发事件的能力,机动性较差[3-4]。
据此,拟设计一种室内自主导航运输机器人,以实现室内小型物件自主精确导航规划运输,并可在运输过程中实现自主导航、自主避障以及提高应对突发事件的能力,同时可以实现人体追踪跟随运输和远程监控。
2 室内运输机器人系统组成
室内运输机器人系统组成如图1所示,主要分为中央控制模块、导航模块、视觉模块、外部控制模块以及底盘驱动模块。
当机器人进行运输工作时,机器人通过视觉模块和导航模块对外界室内环境进行感知和信息采集,传输到中央控制模块进行处理,中央控制模块和外部控制模块进行数据通讯,当中央控制模块接收到PC端或者手机端运输目的地信号后进行处理,发送给底盘控制模块,底盘驱动模块控制机器人向目的地运输移动,同时向中央控制模块发送当前里程计信息,精确定位当前机器人位置,中央控制模块将信息反馈给PC端或者手机端。
3 室内运输机器人结构设计
所设计的室内自主导航运输机器人主体结构如图2所示,主要包括中央控制模块、底盘驱动模块、电池模块、视觉模块、激光雷达、机器人底座、机器人支撑板、小型圆柱储物箱。

图1 室内运输机器人系统组成图

图2 室内自主导航运输机器人主体结构示意图
中央控制模块为ARM架构的第四代树莓派,底盘驱动模块包括两个高强度耐磨驱动轮、牛眼轮、编码器直流减速电机、减速箱,驱动电机通过电机支架固定安装在机器人底座前端,两个高强度耐磨驱动轮安装在机器人底座前端两侧并与减速箱连接,减速箱与编码器直流减速电机连接,牛眼轮安装在机器人底座后端中部,实现三角稳定支撑,同时驱动底盘采用差速转向结构,减小转向幅度,极大地提高转向机动性;视觉模块为Kinect2.0 RGBD体感深度摄像头,精度高,速度快,抗干扰能力强,同时可以实现人体追踪跟随,远程监控。电池模块采用大容量动力锂电池,电池放置在电池保护壳内并安装在机器人底座内部后端,有效提高了机器人的长续航能力。小型圆柱储物箱放置在机器人支撑板后端,激光雷达安装在储物箱上端。
4 室内运输机器人使用方法
当机器人进行室内运输作业时,可接收PC端或手机端运输目的地信息,在已保存的室内二维地图中自动导航规划出一条从初始点到目的地的无障碍路线,在运输过程中遇到地图中未显示的障碍物时,激光雷达和体感深度摄像头自动识别障碍物,并迅速显示在室内二维地图中,DWA路径规划器导航功能重新规划一条移动路径,直到到达目的地点。室内运输机器人使用方法具体流程如图3所示。
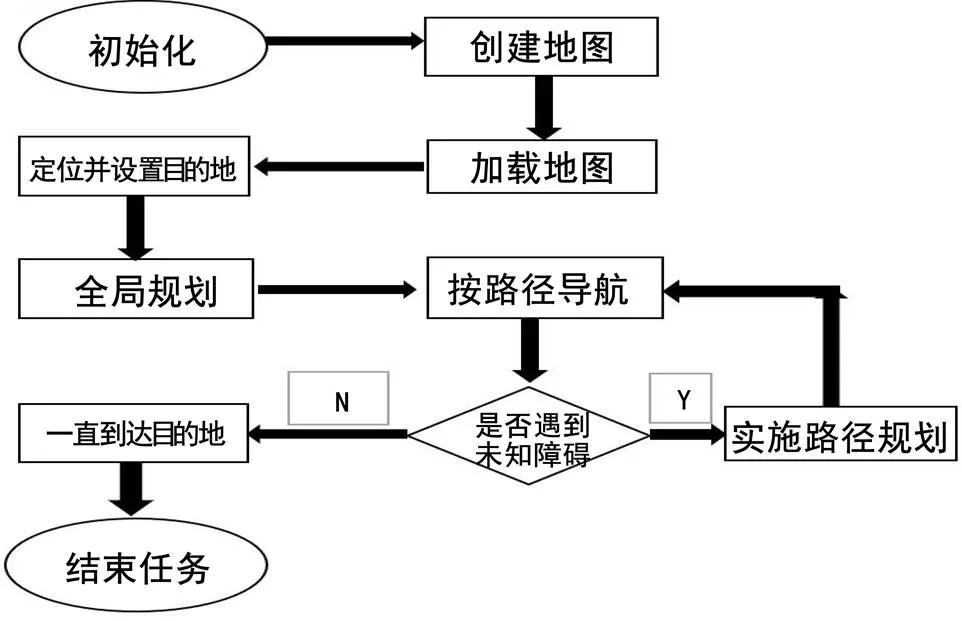
图3 室内运输机器人使用方法具体流程图
步骤1:初始化,启动树莓派并登录树莓派系统,机器人可实现机器人端、PC端、手机端连接登录,机器人端可以自动登录并通过LCD触摸屏进行操作控制,PC端和手机端登录需要与树莓派主板处于同一个局域网,获取树莓派IP地址,通过SSH工具登录树莓派。
步骤2:启动体感深度摄像头、激光雷达、室内环境监控检测模块,设置自动加载初始化命令。
步骤3:启动机器人底座驱动模块,运行base_control底盘控制功能包,运行robot_navigation雷达功能包中gmapping建图功能,通过移动控制机器人运动获取室内相关地图信息,体感深度摄像头,激光雷达可以生成3D点云图和二维室内地图,并保存到树莓派中。
步骤4:在树莓派的3D可视化工具RVIZ中加载建立的二维室内地图,可显示在机器人端LCD触摸屏和PC端,手机端需要安装map navigation APP 软件加载建立,加载完成后初始化起点。
步骤5:在树莓派运行robot_navigation雷达功能包中基于DWA路径规划器导航功能,在显示的室内二维地图中设置目的地点,机器人会在全局范围内进行路径规划,规划出一条从初始点到目的地的无障碍路线。
步骤6:当机器人在移动过程中没有遇到步骤3中地图未显示的障碍物时,则按步骤5规划出来的路线移动运输,到达目的地点,完成导航,转入步骤8,如果在移动过程中遇到步骤3中地图未显示的障碍物时,则转入步骤7。
步骤7:激光雷达在移动过程中迅速识别障碍物,并运行robot_navigation雷达功能包中gmapping建图功能,将障碍物显示在室内二维地图中,同时在树莓派运行robot_navigation雷达功能包中基于DWA路径规划器导航功能,重新规划一条移动路径,直到到达目的地点。
步骤8:重复步骤6~步骤8,进行下一次任务。
5 结束语
一种室内自主导航运输机器人的设计,有效实现了室内小型物件自主精确导航规划运输,在运输过程中可以自主导航,自主避障,在当下室内运输机器人技术领域具有较高的实用性,可大大节省人力,使日常生活工作中室内小型物品的物流运输更方便和高效。
[1]毛彬彬.运输机器人安全控制系统研究[J].起重运输机械,2009(9):51-53.
[2]席丹.运输机器人系统集成设计研究[J].科技广场,2017(10):64-66.
[3]盛腾飞.基于单片机的自动航材运输机器人方案设计[J].科技创新与应用,2018(19):96-97.
[4]章安福.运输机器人软件系统设计[J].教育教学论坛,2019(31):266-267.
TP242
A
10.15913/j.cnki.kjycx.2020.02.027
2095-6835(2020)02-0080-02
李才亮(1997—),男,广东人,本科,研究方向为机械制造及其自动化。
杨芳(1984—),女,山东人,助教,研究方向为机械制造及其自动化。
广东海洋大学本科生导师制下的新工科人才创新创业能力培养探索(编号:524210401)
〔编辑:严丽琴〕
