便携式AUV水下目标搜寻能力的实现与测试
2020-02-22隋海琛
隋海琛
(1.交通运输部天津水运工程科学研究所,天津 300456;2.天津水运工程勘察设计院 天津市水运工程测绘技术重点实验室,天津 300456)
近年来,自主水下机器人在近海、近岸搜救任务中发挥着十分重要的作用。AUV通过搭载声、光、电、磁等载荷设备可完成水下搜寻、近海调查、环境保护与监测、反水雷(MCM)、港口安全、未爆炸弹(UXO)处理、快速环境评估(REA)、监视和侦察(ISR)等多种任务[1]。随着水下探测声呐设备和水下高精度组合定位设备的小型化、智能化、一体化,国外海洋科学研究机构和公司陆续推出了多款便携式水下探测型AUV产品,如Bluefin-9M、REMUS100、Gavia Surveyor、Alister-9、OceanServer Iver3-580等,其外径大都低于200 mm、重量约50 kg,通过1~2人即可完成AUV的收放、数据采集和处理任务[2]。而轻型(300 kg级)、重型(1 t级)、大型(10 t级)AUV由于搭载能力强、工作深度大、续航能力长等,主要完成海洋调查、科学研究、深水搜寻等任务[3]。
受设备研制水平和高性能设备进口限制的原因,国内尚无稳定成熟的、50 kg级的便携式水下探测型AUV[4]。实际应用中仍主要采用轻型以上级别AUV进行水下环境测量和搜寻扫测作业,AUV重量多在300 kg以上,需要配备专门的船舶、吊架才能收放,大大限制了AUV在国内近岸水下探测中的应用[5]。
针对小型AUV、无人船的测量应用,国内已研制成功600 kHz轻便型多波束声呐和侧扫声呐(平均能耗约80 W)模块,并可根据AUV外形进行OEM定制,使国内便携型AUV实现水下目标探查成为可能。
1 AUV系统
中科院沈阳自动化研究所、哈尔滨工程大学、中国海洋大学、西北工业大学等单位都开展了便携式AUV的开发和应用工作,通过搭载温盐深、声呐等传感器完成海洋环境调查任务[6]。
交通运输部天津水运工程科学研究所开发的“天科探海一号”AUV,主要应用场合是300 m以浅水域的水下应急搜救,是一套低成本、小尺寸自主式水下航行器,其在结构、硬件、软件上的模块化设计为灵活搭载各种水下探测设备提供了便利。
1.1 “天科探海一号”AUV
“天科探海一号”AUV主体直径200 mm,长度2 250 mm,重量65.58 kg(含探测声呐),工作航速3 kn,续航力8 h。考虑到低速远程的特点,外形设计采用低阻流线型回转体结构,推进系统采用桨后舵操纵面设计、磁耦合免维护推进器,能源系统采用锂离子电池独立成组供电。
“天科探海一号”AUV壳体采用防锈铝合金铸造,整体密封,分为艏部舱段、探测舱段、主控舱段和推进舱段(如图1所示)。各舱段间采用直插式楔形连接方式,保证良好的整体外形,并方便模块互换和功能舱段扩展。每个舱段均采用零浮力衡重参数配置,降低系统衡重调整的复杂性。

图1 “天科探海一号”总体结构图
图2为“天科探海一号”AUV的主要设备组成。推进舱段采用单桨推进方式,配合艉部水平、垂直桨后舵,可以灵活实现水下定深、定向、定高、轨迹跟踪。艏部舱段采用球形壳体,安装避碰声呐和水声通信声呐,实现对AUV前方障碍物的探测、水下实时位置汇报和接收陆地控制系统的指令。主控舱段安装了智能驾驶仪、NavQuest 600 Micro型多普勒计程仪(DVL)、GIF6536A型光纤惯导系统(SINS)、Novatel卫星导航系统(GNSS)、压力计、无线电、漏水报警等控制及导航通信设备,自主导航精度优于0.5%×自主导航距离(CEP),满足水下探测定位精度要求。探测舱段包括多波束声呐和侧扫声呐这两款探测声呐以及Valport miniCTD型温盐深仪。

图2 “天科探海一号”设备示意图
1.2 一体化探测声呐
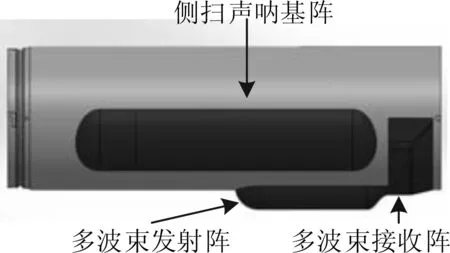
图3 一体化探测舱段
探测舱段采取了外形一体化共形阵安装技术(图3)。共形阵指安装在潜器艏部的声学阵,其外形完全按照潜器的外壳形状进行复制[7]。将侧扫声呐和多波束声呐的换能器按照AUV的外形进行制作,不会降低AUV的流体性能,有效减小了航行阻力、提高推进效率,并保证了声呐信噪比。其中多波束声呐采用T型布阵的结构,侧扫声呐采用双排对称结构。多波束声呐与侧扫声呐之间采用高精度、低温漂的恒温晶体振荡器进行时钟同步[8]。
为避免推进舱段螺旋桨噪声干扰,探测舱段布置于AUV前部,具有最佳的流体噪声抑制能力,又能够最大限度地提高换能器的探测灵敏性。
为了与AUV外形相匹配,多波束声呐换能器采用圆弧型阵,如图3所示。工作频率为600 kHz,波束192个,波束宽度1°×0.5°,最大开角160°,探测量程达150 m。通过探测舱段顶部安装的温盐深仪,可方便地采用声速经验公式计算表层声速与声速剖面,从而保证获得高精度的多波束水深数据。声速经验公式常用的约10种,可根据不同的情况选择不同的公式[9]。
侧扫声呐换能器为双排均匀线阵结构,每条水平阵的长度为400 mm,如图3所示。工作频率为600 kHz,探测量程150 m,垂直开角不小于 45°。通过采用自适应孔径成像技术,可获得恒定线分辨率为5 cm×2 cm,像素精度达2 cm×2 cm。多波束声呐和侧扫声呐的电子系统及控制系统安装在一体化探测舱段内。声呐电子系统负责驱动声呐基阵发射声波、接收声信号并将声信号进行模拟和数字处理,最终输出海底地形和图像。声呐控制系统负责与AUV主控计算机进行通信及时间同步,采集声呐数据与导航数据,并将数据存储在一块2 TB容量的硬盘内。
1.3 声兼容、电磁兼容处理
“天科探海一号”AUV中,集成了多波束声呐、侧扫声呐、水声通信声呐、避碰声呐、DVL等多类声学设备,部分声学设备的频段存在交叉。为了避免设备之间的干扰,综合采用了结构设计、频段选择、信号处理、同步控制、屏蔽处理等方法解决声兼容、电磁兼容可能存在的问题。
结构设计方面:根据各类声学设备的垂直向开角、水平向开角、频率等多个参数,将不同的声学设备从空间上隔离开,将相近或倍频范围的声学设备拉开空间距离(线性距离或者空间角距离)。
频段选择方面:多波束声呐、侧扫声呐、DVL的频段都在600 kHz左右,在硬件设计时采用宽带换能器[10],通过软件控制使探测换能器发射和接收不同频段的信号,并与DVL的工作频段分开。
信号处理方面:采用CW、FM等多种不同的信号体制,通过信号采集和处理模块抑制残留的声干扰[11]。再通过增益控制、滤波处理、信号调理等手段,抑制干扰的相互作用,把影响降低到最低。
同步控制方面:在系统设计和模块选型的过程中,选择的设备均带有同步接口,可以同步各系统的发射周期。通过设置同步控制器,可以使各个声学设备同步或延时同步工作,避免收发干扰。
屏蔽处理方面:电磁干扰,主要来源于系统供电、大功率负载、射频干扰等设备。舱段中采用规范的滤波、接地和屏蔽方法,并为侧扫声呐、多波束声呐、水声通信声呐的电子舱加装屏蔽外壳。
2 设备安装校准
导航设备和探测声呐是AUV实现水下目标探查的核心装备。为了获得准确的地形地貌测量数据,必须获得各个设备的安装误差。由于所有设备都进行了时间同步,可认为延时误差已被修正。
2.1 导航设备校准
GNSS/SINS/DVL组合导航方式,是目前便携式AUV的主要定位方法。AUV在水面能接收到GNSS信号时使用卫星定位,AUV在水下无GNSS信号时则利用SINS、DVL进行航位推算定位。
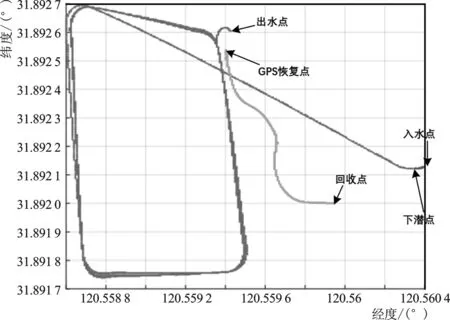
图4 导航设备标定试验
在设备安装时,要求SINS、DVL的艏向及姿态与AUV尽量保持一致。以SINS中心作为AUV的坐标原点,精确量取GNSS天线和DVL的安装位置偏差。在条件允许的情况下,可采用坐标测量机、激光跟踪仪、光学扫描仪等精密测量方法。
SINS的安装角度偏差和DVL的测速系数,需要通过水下航行测试进行计算和验证[12]。为了使得测量的数据更准确,需要AUV做多种航向的航行(例如平行于东方向、平行于北方向、与南北方向夹角45度等),而且入水和出水点的直线距离应尽可能远一些。
在湖试过程中进行了“天科探海一号”AUV自主导航传感器标定、DVL测速性能标定以及自主导航精度验证测试试验。通过执行直线、转弯、下潜、攀升等测线(图4),并将全部测线中的偏角求取平均即可得到需要的数据,测出SINS的艏向偏差值为-2.36°,DVL的测速系数为0.994。经改正后,测试航程2 000 m,误差为7.53 m,导航精度为0.36%自主航程,满足探测声呐定位需求。
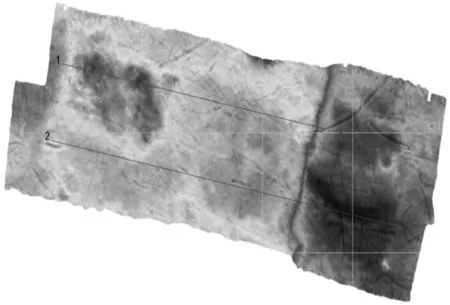
图5 多波束声呐校准测线示意图
2.2 声呐设备校准
首先通过机械设计和安装固定,确保多波束声呐和侧扫声呐的换能器与AUV之间的艏向及姿态偏差均小于2°。采用精密测量方法,精确量取各个换能器与SINS中心之间的空间关系,然后通过水下校准测试对换能器的角度偏差进行进一步计算和验证。
多波束声呐的水下校准测试是为了得到换能器相对于AUV的横摇、纵摇、艏向偏差,其工作方法与船载多波束声呐是一致的[13]。即完成声速剖面测量后,选择地势平坦的水域,往返测线进行横摇偏差校准;选择地势变化的水域,往返测线进行纵摇偏差校准,平行测线进行艏摇偏差校准(图5)。通过湖试数据计算得到,横摇偏差为0.05°,纵摇偏差为-1.20°,艏摇偏差为0.87°。

6-a 左侧校准 6-b 右侧校准
侧扫声呐的水下校准测试主要是为了得到两侧换能器分别相对于AUV的艏向偏差。湖试过程中,将一个强反射目标(如空心钢球等)沉入水底,在目标周围10 m、15 m、20 m、25 m的距离分别布置测线,如图6所示,其中左侧校准的测线为逆时针,右侧校准的测线为顺时针。每侧测试有16条测线,双侧共32条测线。取32组成像结果中的目标位置的平均值作为真值,统计每侧16组定位结果与真值之间的误差,根据误差的均值计算得到换能器的艏向偏差。其中左侧换能器艏向偏差为0.16°,右侧换能器艏向偏差为0.28°。
3 水下测试
2019年7月,“天科探海一号”AUV在近海进行了水下测试,水深约30 m。
3.1 水下地形探测
按照布置好的航线,以固定航速进行测量,完成6条测线的多波束声呐测量(图7)。对于每条测线,保留±72°波束范围内的所有有效波束点。每次选择2条测线,对比重叠部分的水深,统计水深比对不符值的点数。在重叠区域水深比对时,对于两个文件中的点,当平面位置距离小于0.5 m时,认为是同一位置点,对其深度进行比对。按照以上方法,得到6组对比结果,统计结果如表1所示。可以看出,以上6组对比结果,超限点(大于±0.20 m)比例最大值为3.08%;6组合并统计时,总比对点数为316 109,超限点数量仅为9 032,超限点比例为2.86%。
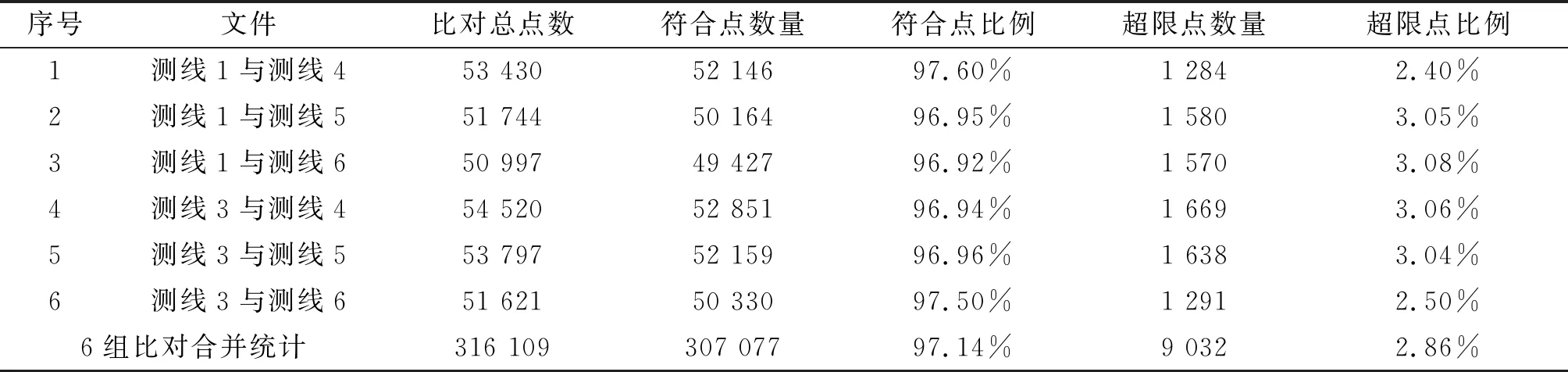
表1 测深误差测定统计表
3.2 水下地貌探测
在多波束声呐测量的同时,采用侧扫声呐进行海底地貌测量,可根据海底跟踪结果自动设置增益、TVG等图像参数。测量区域缺少明显地物,但渔业活动形成的锚沟发育丰富。通过锚沟清晰度和位置的对比,验证测量结果的可行性。
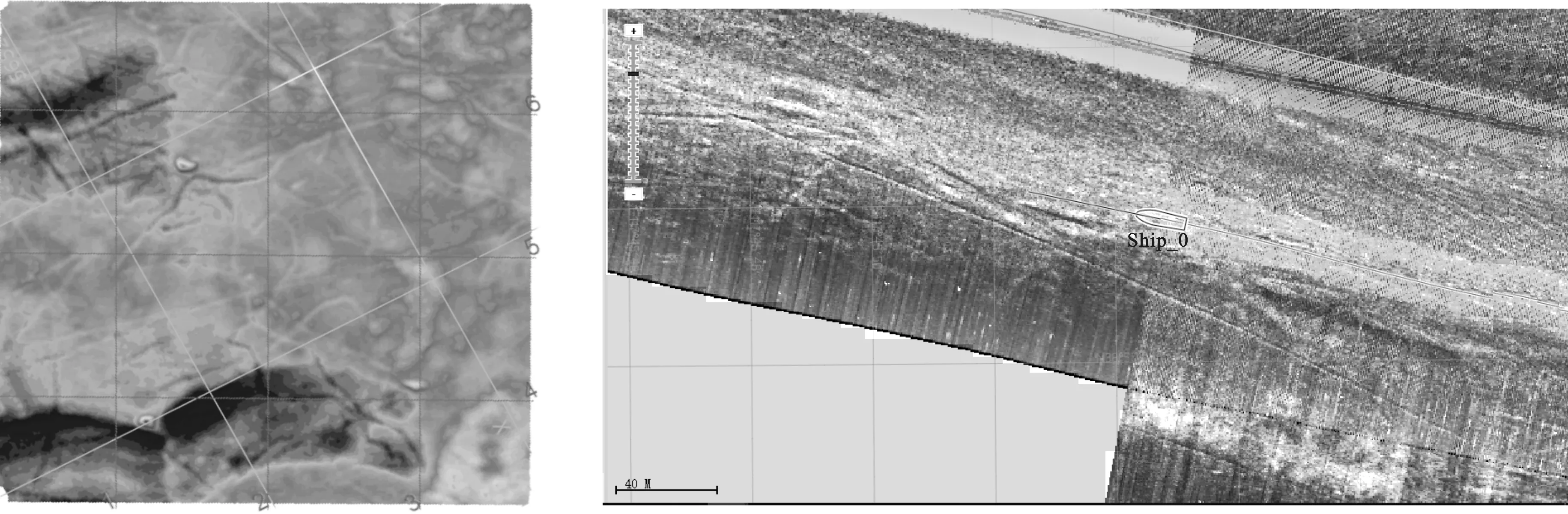
从图8中可以看出,海底地貌效果清晰,不同测线得到的锚沟位置完全吻合,实现了侧扫声呐无形变、无错位的自动图像拼接,解决了传统的拖曳式侧扫声呐由于位置、姿态误差的限制而造成的声呐图像变形、目标位置偏差较大的问题。
4 结论
“天科探海一号”AUV采用模块化平台设计、共形阵声呐安装和声信号兼容处理等技术,实现了多波束声呐和侧扫声呐在便携式AUV上的搭载,其中多波束声呐主要应用于海底地形测量,而侧扫声呐主要应用于海底地貌成像,二者相互验证可有效提高海底面探测的精度与效率。
模块化设计使“天科探海一号”AUV成为了一个开放式平台,可使平台的负载能力得到充分利用,能够根据工作需求执行多样性探测任务。共形阵声呐安装能够减小航行阻力、提高推进效率、抑制流体噪声,有效提高了浅海环境下的探测性能。声信号兼容处理避免了设备之间的干扰,使频率接近的多波束声呐、侧扫声呐、DVL能够同步协同作业。
“天科探海一号”的主要用途是利用成像声呐实施水下应急搜寻探测,要求AUV的探查结果能以一种精确有效的方式展现出来,便于水下目标的探查、分类、判图、识别和定位。在以后的研究工作中,应进一步提高AUV导航与探测的精度,并加强AUV在海上使用环境中长时间使用的可靠性及环境适应性,使便携型AUV拥有更加广阔的应用前景。
