基于GPS导航技术的智能无人快递车技术研究
2020-02-20陈美玲李欣鹏
郑 阳,陈美玲,李欣鹏,徐 伟
(南京工业大学浦江学院,江苏 南京 210000)
0 引 言
互联网的快速发展带动了快递行业的空前繁荣。业务量的增加,致使快递业面临着一系列问题。例如,很多较偏远地区取件不便;部分地区快递派送人员工作量较为繁重,无法快速派件引发买家与快递公司的争执。归结原因,在于不断增加的快递物流公司成本和服务风险,尤其到了每年的“双十一”,这些矛盾聚焦成为社会的热点问题。校园、住宅小区等人口较为集中并有一定停车空间的场所属于人群高密度区域,因此适合无人快递车的行驶路线[1]。这需要快递车在对服务区域道路基本熟悉的情况下具备良好的路径规划能力,既能够满足区域内所有用户的需求,又能够保证行驶路线的合理,节约时间和成本。基于这样的社会背景,研究一种智能无人快递车物流体系,可有效解决“最后一公里”的资源浪费、效率略低、可靠性无法得到保障以及用户体验性差等一系列问题。
研究带有定位导航技术的智能无人快递车是一种发展趋势。首先,定位导航技术能够更加方便用户的取件,更高效地完成配送任务,且可以省略很多现有取件环节,只需用户确认到达定位点便可以取件。其次,智能快递车基于自助寄取快递系统,融入模块化、集成化的设计理念,实现了工序间的相互配合,以工业化的流程实现了整个快递过程,提高了快递行业的工作效率,摆脱了对寄取快递的时间限制,实现了取件过程的智能化,具有较好的推广应用价值。
1 系统设计
系统包括树莓派3B、DC-DC降压电源模块、GPS模块M8N(带地磁传感器)、L298N电机驱动板模块以及红外线传感器等[2],结构如图1所示。以树莓派为主控,GPS的数据通过串口使树莓派计算出导航角,与当前位置对比后到达事先设置好的导航点,通过软件设定多个导航点使小车到达指定位置,并通过红外线传感器检测环境后,由舵机带动打开舱门,从而实现快递的智能运输功能。
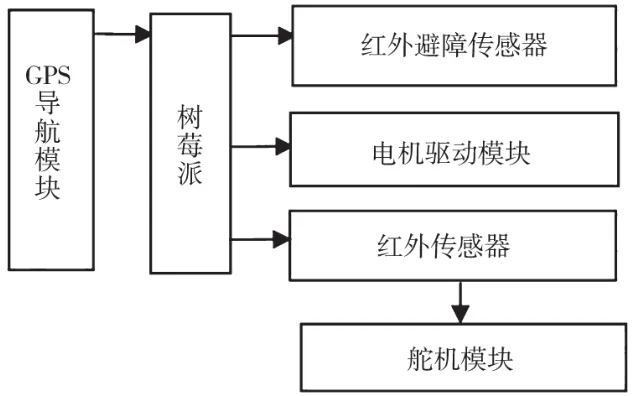
图1 系统设计结构图
2 GPS导航原理
图2为GPS导航系统定位示意图。
2.1 导航系统基本原理
测量出用户接收机与已知位置卫星之间的距离,是GPS导航的基本原理[3]。要实现这一原理,首先要通过现有的卫星星历查出已知卫星对应的位置,其次通过记录传输时间即已知的卫星所发出的信号传播到用户所经历的时间,将这一时间乘以光速,从而实现GPS导航[4]。但是,由于大气层电离层的干扰,使得这一结果并不是用户与卫星之间的真实距离信息,而是GPS卫星正常工作时伪随机码发射的导航电文。

图2 导航系统定位示意图
2.2 导航系统定位原理
单点定位和差分定位是GPS导航系统中的两种基本定位方式[5]。根据高速运动的卫星瞬间位置作为已知的起算数据,采用空间距离后方交会的方法确定待测点的位置。假设t1时刻将GPS接收设备安装于地面待测点,可以测定GPS信号到达接收设备的时间t2,再加上接收设备所接收到的卫星星历等参数设置即可实现定位。
3 GPS数据表示
理论上,从GPS得到的数据一般是经纬度[6],而经纬度有多种表示方法。本文采用的坐标格式为度.分.分的十进制小数。为了和谷歌地球的坐标格式一致,本文在软件设计中将DD.MMMMM转换成DDD.DDDDD格式[7]。
4 小车导航原理
行驶过程中,各元器件在树莓派中的对应接口如图3所示[8]。
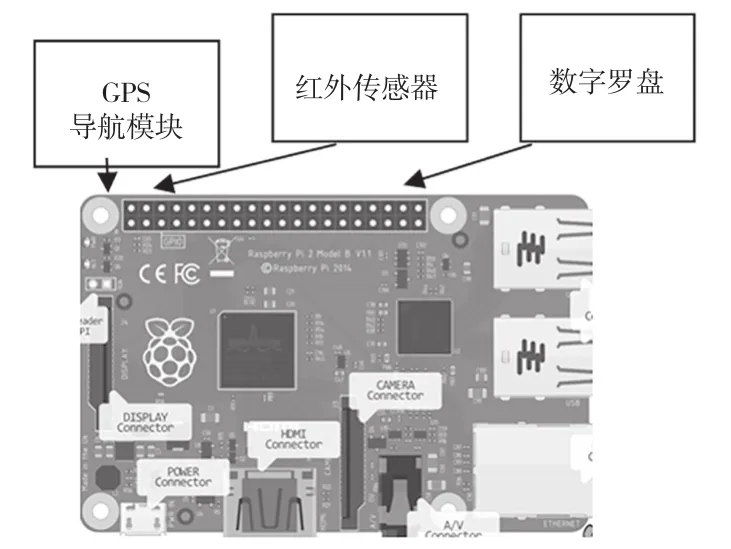
图3 接口示意图
4.1 GPS坐标解算程序
GPS通过串口与树莓派连接。通过选用M8N模块,树莓派接受到GPS信号后开始解算GPS坐标,解算完成后记录下当前位置,并与目标航点GPS进行对比计算,计算出航向角,调整小车方向与航向角一致,然后向航点驶去,小车导航如图4所示。
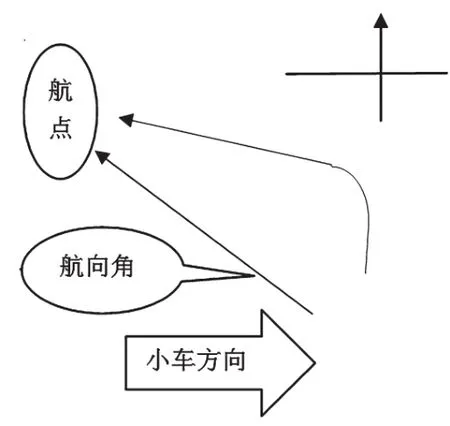
图4 小车导航图
通过对当前GPS坐标与航点GPS坐标解算出来的航向角,结合当前GPS坐标与航点的距离,由haversine公式[9]可知两个GPS点之间的距离和方位。这就是小车导航的基本原理,但是这里涉及一个问题,即小车如何知道自己车头的方向角去调整至航点方向航向角。这里需要用到数字罗盘,通过数字罗盘小车能判断车头所朝方向,然后调整小车车头至航点角度,最终当方向角与航向角相同时,小车便开始直行。
4.2 数字罗盘的选定
数字罗盘选用的是HMC5883L,并通过I2C方式与树莓派连接,连接后再通过主程序中whlie循环,轮回访问HMC5883L。当返回数据后,计算小车的方向角,然后对比之前计算的航向角,将两者求差值计算出小车应调整的角度。得到角度后只需让小车旋转即可,直至小车航向角与方位角一致,此时小车直线驶往航点。当距离到规定值时,小车即到达航点,这个定值就是程序开始初期所输入的误差范围[10]。在这个范围内,小车认为已经到达目标点。
4.3 避障功能的实现
树莓派外接避障传感器的目的在于,通过利用红外避障传感器自身可以将模拟或数字信号转化为开关量信号的特点,实现小车实现遇到信号会避障的功能[11]。
4.4 客户端操作的实现
利用HDIM线与HDIM接口显示器,直接将树莓派和计算机显示器相连,查出树莓派的USB口后连接路由器提供的WiFi,此时树莓派会与路由器相连接,获得树莓派在路由器连接下的IP地址后,便可在计算机上运行程序。
5 快递运输功能原理
小车通过GPS完成指定航程后,自身货仓携带的红外线传感器检测指定地点附近是否有客户,检测到后发出对应信号传递给树莓派。树莓派接收到信号后向舵机发出指令,打开货舱舱门,等到客户拿走快递离开指定位置后,传感器不再向树莓派发出信号。此时,树莓派将会对舵机再一次发出指令,使得货舱舱门关闭。
6 结 论
本文采取一种通过以树莓派为控制核心与多种模块结合来实现智能物流运输的小车设计方案。经过调试,小车能够灵活应用于各个领域和普通用户中,为人们的日常生活提供方便,具有较强的推广使用价值。
