基于EHA的鱼雷舵机伺服系统的设计与研究
2020-02-18徐宝林1王俊杰陈英龙
徐宝林1, 王俊杰, 陈英龙
(1.江门职业技术学院 机电技术系, 广东 江门 529090; 2.大连海事大学 机械工程, 辽宁 大连 116000)
引言
鱼雷是现代海军作战所配备的先进性武器,能在水面或水下隐蔽,在航行过程中具有距离远、航速快的特性,同时在战术上用以打击水中的战舰目标,有破坏性大、命中效果好的优势,是一种能够自动控制、自主前进的重要航行设备[1]。如图1所示,鱼雷入水后有两种运动模式:其一在下潜的非控制阶段,舵角通常为0或预先设定值,鱼雷伺服系统基本不工作;其二是鱼雷导引追踪时,根据目标运动和鱼雷运动两种信息由舵机系统调整舵面角度。

图1 鱼雷运动模式
目前鱼雷通常是通过调整舵机舵面来实现运动方向改变的,舵面由系统中的液压缸直接控制,采用电液伺服阀[2]实现。如图2所示:以传统的正开口喷嘴挡板阀为例,假设没有电气信号输入,力矩马达的衔铁通常在平衡位置,挡板两侧所受液压油的作用力相等,此时油液自泵源进入,经流进油口,进而通过过滤器在阀芯处分4路油液流出。倘若有信号输入,则鱼雷系统中的马达衔铁带动反馈杆偏转, 使挡板发生移动(向左移动),左侧油路压力升高,阀芯向右移动。这样阀芯的左侧接通,使油液高压部分与液压缸的进油路相连,阀芯的右侧阀孔打开,此时油液与液压缸的回油腔相连,最终通过电液伺服阀实现活塞运动,使鱼雷舵机舵面偏转。

1.导磁体 2.永久磁铁 3.控制线圈 4. 衔铁 5.弹簧管 6.挡板 7.喷嘴 8.溢流腔 9.反馈杆 10.阀芯 11.阀套12.回油节流孔 13.固定节流孔 14.油滤 15.作动筒壳体16.活塞杆 17.活塞 18.铁芯 19.线圈 20.位移传感器图2 传统鱼雷舵机系统结构图
经典电液伺服系统的驱动力较大、频率响应速度很快,但其同样存在问题:
(1) 采用发动机提供泵源动力,发动机转速不稳会造成液压系统供油压力脉动;
(2) 电液伺服驱动系统工作效率较低(约为30%~40%),造成供油功率上升;
(3) 系统中液压元件较多,结构回路布置复杂,集中供油导致可靠性下降。
相比于传统的鱼雷电液伺服阀控制,采用电动静液作动器(Electro Hydrostatic Actuator,EHA)为基础的鱼雷舵机伺服系统,可以大幅度的解决大型柴油机噪声大、流量脉动大、能量效率低等问题,同时舵机控制系统的质量、体积均减小。EHA是把伺服电机、液压泵、小型油箱、液压缸、液压集成阀组、压力测量检测元件和控制器统一整合后集成化,使该微型集成于一体化的执行机构具有质量轻、结构体积灵巧、效率高等的突出优点,克服了以往液压系统中存在的固有缺陷,具有较强的实际性能,也验证了其理论性的意义[3]。
除此之外,EHA在国内的航空航天领域也存在广泛应用与研究,在火箭、飞机和汽车上都有所涉及。日本某电气株式会社所研究EHA技术最具代表,在船用车用舵机、工业锻压机、液压成型机等装置均有应用,即把伺服电机、中间联轴器、液压泵在轴向上依次串接,并将液压缸置于径向的另一侧,保证整个构型结构紧凑,体积窄小。美国NASA在 F-18 SRA飞机上装备EHA,并就其性能评估,测试结果中飞机的EHA的操作感良好,并与传统装置相抗衡[4]。
齐海涛[5]将电动静液作动器应用于提高飞机性能,按照EHA系统组成和工作原理对重要飞行控制的部分改进,加强作动系统的推进性能,同时用AMESim仿真软件对所研究的飞行系统进行分析,所设计的飞机系统指标均达到要求;赵进宝[6]将EHA另辟蹊径,应用于火箭舵机,探究转速、排量等参数复合调节对电动静液作动器的影响,证明了EHA中转速和排量复合调节优于普通的定排量控制,对后续EHA的设计与创新有重要指导意义;于凤辉[7]将直驱式容积控制电液伺服系统运用在列车上,运用ADAMS软件进行列车受力分析,并用 AMESim展开液压和力学联合仿真,在理论上完成摆式列车倾摆系统的研究。
本研究提出了一种基于电动静液作动器的鱼雷舵机系统,采用交流伺服电机通过联轴器驱动微型液压泵,控制微型定量泵的旋转速度,改变进入整个鱼雷舵机的流量,最终实现舵面作动器的精确运动,能够有效地减小系统脉动,并提高系统效率至70%以上;同时采用AMESim进行仿真,建立鱼雷舵机的模型,计算相关元件参数并进行选型,在考虑舵机末端的水动力负载的前提下,保证了鱼雷舵机系统的快速响应。
1 鱼雷舵机液压伺服系统
1.1 液压系统工作原理
1) 结合鱼雷舵机的运动模式,考虑给定的技术条件和参数指标,其液压原理图如图3所示。
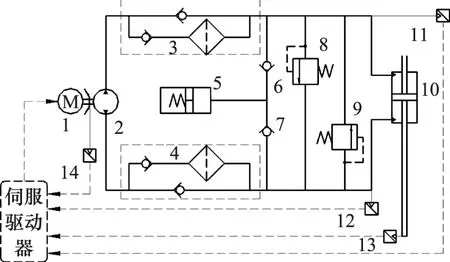
1.交流伺服电机 2.微型定量泵 3、4.单向过滤器 5.增压油箱 6、7.单向阀 8、9.安全阀 10.对称缸11、12.压力传感器 13.位移传感器 14.转速传感器图3 EHA鱼雷舵机系统的液压原理图
EHA鱼雷舵机是闭式的新型液压系统。系统主要由伺服控制器、交流伺服电机、微型定量泵、增压油箱、双作用对称缸、单向过滤器、集成阀块以及压力、位移、转速测量装置等组成。与传统液压系统相比,该系统是通过改变交流伺服电机的旋转速度,通过联轴器推动微型定量泵运转, 改变进入整个鱼雷舵机的流量,最终控制鱼雷作动筒活塞的位移运动,实现舵面的角度调节。本研究所设计的EHA鱼雷舵机液压系统特点如下:
(1) 为了提高鱼雷EHA的频率响应,本系统舍弃了传统电动静液作动器中的液控单向阀元件,采用普通单向阀自动给回路补油;
(2) 为了保证鱼雷系统平稳的吸油能力,将增压油箱经由2个单向阀并联,这样舵机低压腔调定压力会一直高于大气压力,防止油液发生气穴现象,影响工作寿命。同时由于鱼雷舵机系统的运行时间短、效率较高,因溢流损失所造成的液压油发热影响较小,所需增压油箱较小;
(3) 为了保证安全,将2个溢流阀并联于液压系统中,假设某一侧的系统压力发生过载,可以打开回路使液压缸2腔沟通,起安全阀的作用。
2) 鱼雷舵机系统是鱼雷的一个辅助系统,在整个系统中所占据空间要尽可能小。本研究所要求的系统整体外形尺寸为200 mm×90 mm×50 mm,质量不大于3 kg。根据《GJB 6436-2008鱼雷液压舵机通用》,供油压力为5.1 MPa时,舵杆在运动行程内拉力、推力均应大于2500 N,作动缸在承受外载荷的前提下运动全行程(24 mm)所需时间不大于0.25 s。鱼雷舵机EHA系统控制电路的固有频率在6 Hz以上,且对应该频率的输出与输入量相比,幅值应衰减-3 dB,相位应滞后90°。
如图4所示,定量泵和伺服电机一定是串联布局的,两者以联轴器相连,而集成阀块和增压油箱不一定要串联,可以跟定量泵并排,以此满足长度尺寸要求。为了减小鱼雷舵机系统的体积,在满足负载力输出前提下,应提高系统压力,选用微量泵和小功率伺服电机。
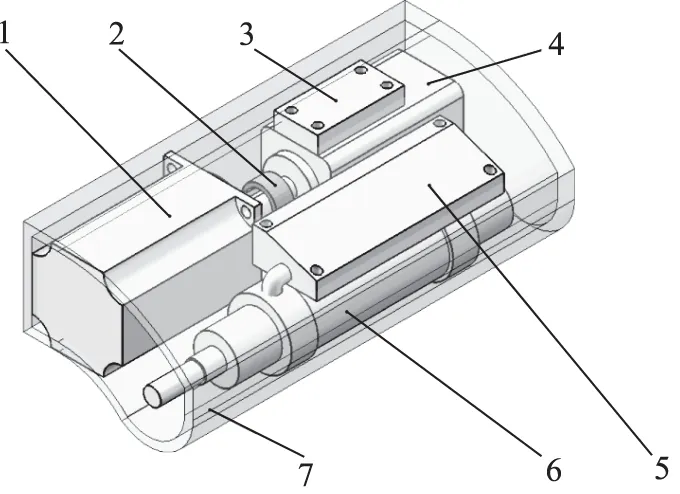
1.伺服电机 2.联轴器 3.增压油箱 4. 定量泵 5.集成阀块 6.作动筒 7.EHA壳体图4 鱼雷舵机系统的整体示意图
1.2 主要元件选型[8]
1) 电机的计算与选择
EHA工作效率受油液黏度、系统流量、工作压力等多个因素的影响,其总效率大约为70%~85%。根据拉力、推力特性均应不小于2500 N(250 kg),运动全行程平均速度0.1m/s,则伺服电机功率为:
(1)
式中,P—— 电机的功率,W
F—— 舵机末端推拉力,N
v—— 液压缸运动平均速度,m/s
η总—— EHA的总效率,取75%
选用电机限定功率为340 W,质量约1.3 kg,外形尺寸约110 mm×52 mm×52 mm,其他参数如表1所示。
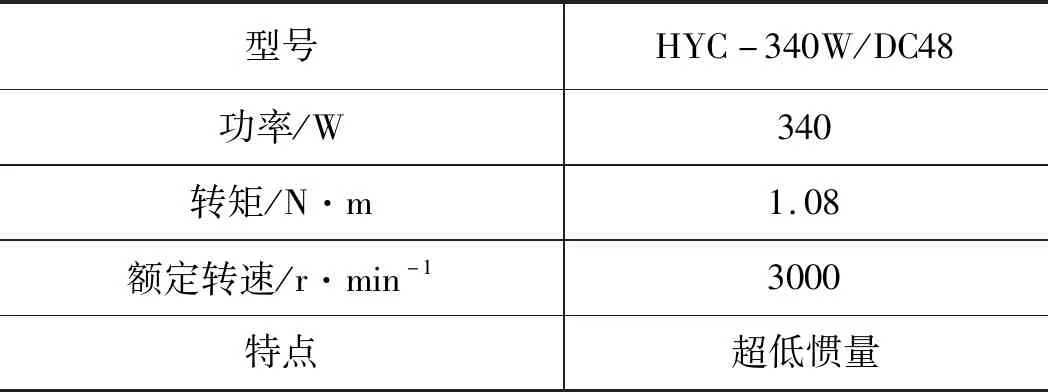
表1 伺服电机主要参数
2) 液压泵的计算与选择
根据所选定的电机型号,此时液压泵通过联轴器与电机输出轴连接,故输入功率为340 W,额定转矩1.08 N·m,液压泵的规格计算为:
(2)
式中,Vg—— 液压泵的排量,mL/r
p—— 系统压力,MPa
ηv—— 液压泵的容积效率,取90%
根据液压泵所需排量,查阅液压手册选用HYC-MP1F微型液压泵,质量约0.45 kg, 外形尺寸约93 mm×40 mm×40 mm,其相关技术参数如表2所示。
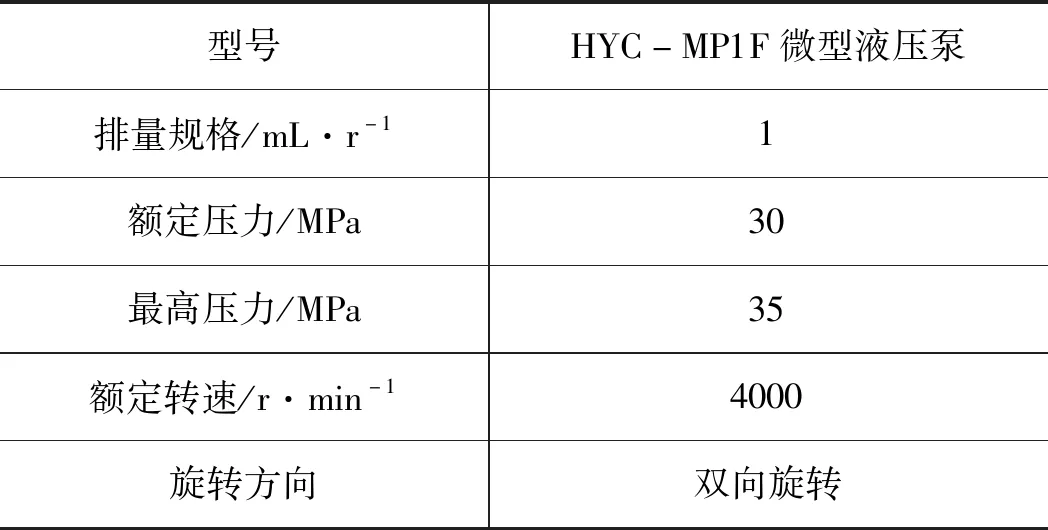
表2 液压泵主要参数
根据上述选型确定系统压力:
3) 液压缸的计算与选择
液压缸的参数选择主要与负载和控制性能有关,目前作动筒直接驱动负载,故可直接确定液压缸的有效面积Ap为:
(3)
式中,F—— 作动器输出力,N
Ap—— 液压缸的有效面积,m2
pL—— 液压缸工作压力,取系统额定压力6.5 MPa
现确定液压缸活塞直径及活塞杆直径,由于:
(4)
式中,D—— 液压缸缸筒内径,m
d—— 活塞杆外径,m
由式(4)得:D≈0.0228 m,按GB/T 2348—2018液压缸缸内径和活塞杆直径系列的要求,并留出一定的安全裕量,选择液压缸缸筒内径D为25 mm,活塞杆外径d为10 mm,此时的液压缸有效面积Ap为412.3 mm2。
出于标准化考虑,按照GB/T 2349—1980选择液压缸行程为25 mm。
2 系统仿真分析
2.1 液压系统建模
在目前所有液压仿真软件中,AMESim因其模块化优势被广泛采用,尤其是液压系统的设计[9]。本研究以鱼雷舵机性能参数为基础,如图5所示,在AMESim仿真软件中建立鱼雷舵机伺服系统模型。
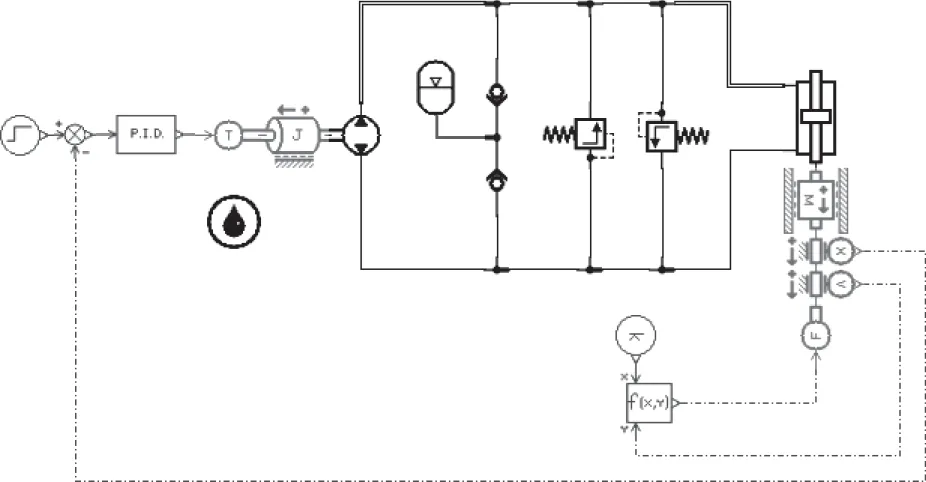
图5 鱼雷舵机伺服系统的建模
2.2 水动力负载模型
转舵机构由鱼雷舵机EHA中的液压缸推动,进而由液压缸带动舵叶转动。舵面在发生角度调整时,并非受到一个恒定的外负载力,也会在水中受到粘滞力。通常当舵叶转到一定角度时,作用在舵面上的铰链力矩[10]可用ML表示为:
ML=Kδ·δ
(5)
式中,Kδ—— 舵面铰链力矩系数
δ—— 舵面转动角度
由式(5)可知,舵面铰链力矩系数和舵面转动角度分别为力矩计算的两个输入值,其中舵面铰链力矩系数与舵叶处的水流速度相关,以常数值K带入;转动角度也可通过位移传感器反馈,且角度改变值与力矩大小为一一对应关系。最终在负载模型中功能函数f(x,y)以恒定水流速度的输入x和舵面转动角度的反馈数值y表达。
2.3 系统参数设置
据于凤辉[7]等研究,液压泵的排量和转动惯量对EHA系统快速性影响较大。伺服电机的动态特性受电磁、机械两部分的影响,而主要影响为机械部分的转子转动惯量,故将液压泵、电机的影响统一计算到模型的转动惯量J中,即:
J总=J电机+J泵+J其他
(6)
式中,J电机—— 伺服电机的转动惯量,参照选型取1.16×10-5kg·m2
J泵—— 微型定量泵的转动惯量,参照选型取0.8×10-5kg·m2
J其他—— 缸和舵叶对转动惯量的影响,设缸和舵叶的重量为1 kg,则:
如表3所示,鱼雷舵机系统的参数设置如下。
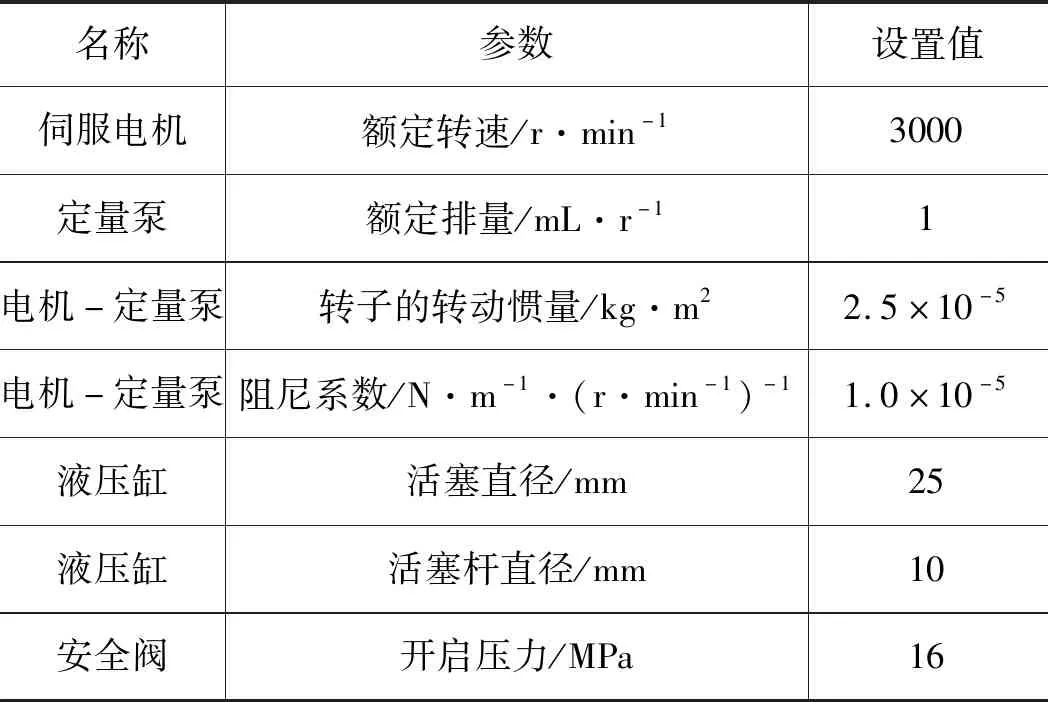
表3 参数设置
2.4 系统仿真结果及分析
设仿真时间设置为1.0 s,以0.001 s为一个采样值,在时间域运行仿真。在0.1 s处给定一个阶跃输入信号值0.024 m,鱼雷舵机作动筒末端位移曲线如图6所示,作动筒末端速度曲线如图7所示,鱼雷舵机作动筒频率响应曲线,如图8所示。
(1) 结合图6、图7可知,在模拟计算的工况下,在0.1 s输入信号作用下鱼雷舵机作动筒末端开始克服负载力动作,迅速运动到行程终点。液压缸最大速度为1.6 m/s,当运动到液压缸行程末端时,速度降为0。EHA运动速度满足仿真需求,符合系统设计要求;

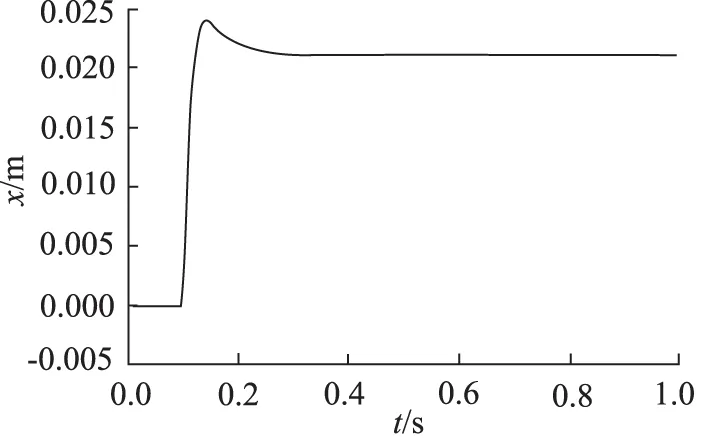
图6 鱼雷舵机作动筒末端位移曲线

图7 鱼雷舵机作动筒末端速度曲线
(3) 运用AMESim绘制闭环系统伯德图,将control值设定为位移输入信号,而活塞杆的末端位移设置为observer值, 如图8所示,点击仿真得出频率响应结果。
从幅频特性曲线中可以看出,在带载条件下,幅值衰减-3 dB时幅频特性为16 Hz,相位滞后90°时相频特性为41 Hz,均满足大于6 Hz的要求,保证了鱼雷舵机系统的快速响应,符合系统设计要求。
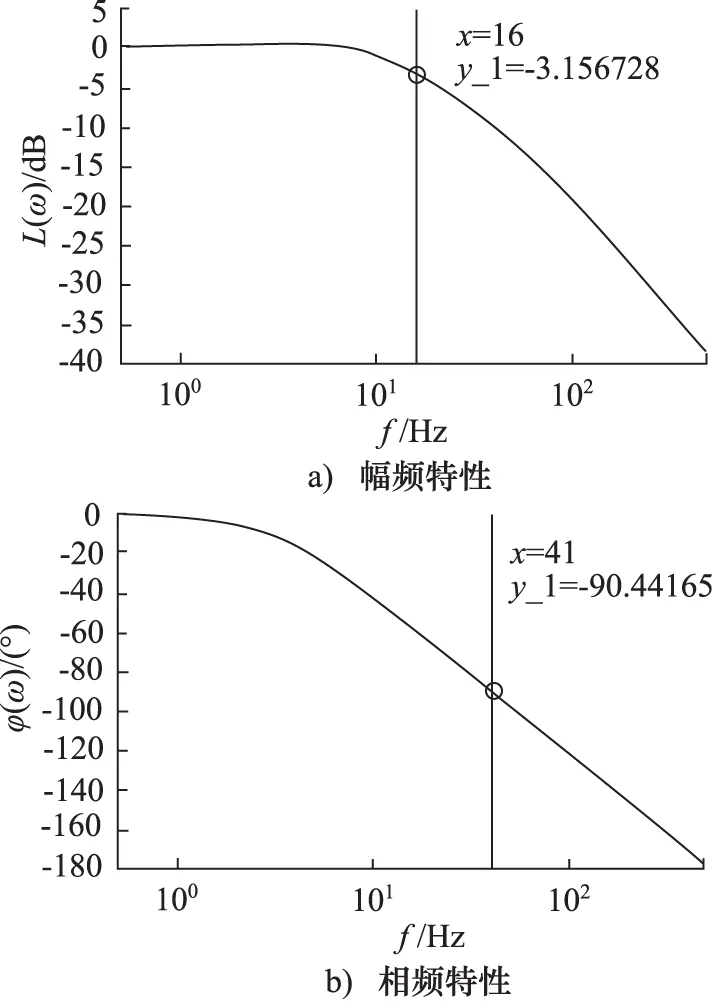
图8 鱼雷舵机作动筒频率响应曲线
在水动力负载模型中,施加不同铰链力矩系数K值,设置仿真时间为0.5 s,每0.001 s做一次采样,仿真结果如下所示。
从图9、10看出,当舵叶处的水流速度发生变化时,铰链力矩系数以不同常数值K带入,鱼雷舵机作动筒末端位移、速度也随之变化。但通过合理的PID校正环节,其对舵机系统的稳态精度影响基本一致。

图9 不同负载下鱼雷舵机末端位移曲线

图10 不同负载下鱼雷舵机末端速度曲线
3 结论
(1) 对鱼雷舵机的两种工作模式进行研究分析,基于EHA设计了液压伺服系统,并将鱼雷系统中重要组成元件进行计算与选型;
(2) EHA通过调节交流伺服电机的旋转速度,通过联轴器推动微型定量泵运转, 改变进入整个鱼雷舵机的流量,最终控制液压缸活塞的位移或速度运动,实现鱼雷舵面的角度调节,系统结构简单、效率高;
(3) 采用AMESim进行仿真,当作动缸末端位移量在0.021 m趋于平稳时,此时EHA舵机系统受力均大于2500 N,调整时间为0.2 s,且幅频特性为16 Hz,相频特性为41 Hz,均满足大于6 Hz的要求,保证了鱼雷舵机系统的快速响应,对鱼雷舵机的研发有重大理论指导意义。
