面向灾害救援的轮腿变形机器人设计
2020-02-14滕文骏
滕文骏


摘要:本文设计了一款面向灾害救援的轮腿式变形机器人,其具有轮式滚动和腿式行走可相互转化的显著优点,具有广阔的应用前景。本文首先提出了全局的总体方案,包括技术路线和系统组成,其中系统分为机械系统和控制系统,机械系统包括了驱动系统、转动轮、操作臂和底盘;然后针对关键变形过程展开了详细的论述,设计了具体的变形方法和转动轮的具体结构;其次系统性的陈述了包含驱动系统、转动轮、底盘和机械臂在内的四部分子系统;最后对本文进行了总结和展望,提出了本文的创新点和不足之处。本文设计的轮腿式变形机器人具有灵活性好、适应性强的特点,在商业发展和军事领域等不同方面展现出了深厚的发展潜力。
Abstract: This paper designs a wheel-legged deformable robot for disaster rescue, which has the significant advantages of wheel-type rolling and leg-type walking and can be transformed into each other, and has broad application prospects. This paper firstly presents the overall overall plan, including the technical route and system composition. The system is divided into a mechanical system and a control system. The mechanical system includes the drive system, rotating wheels, operating arms, and chassis. Then this paper makes a detailed discussion on the key deformation process, designs the specific deformation method and the specific structure of the rotating wheel; Secondly, it systematically stated the four parts of the subsystem including the drive system, rotating wheels, chassis and robotic arms; Finally, this paper summarized and prospected it, and proposed the innovations and deficiencies of this article. The wheel-leg deformed robot designed in this paper has the characteristics of good flexibility and adaptability, and has shown deep development potential in different aspects such as commercial development and military fields.
關键词:灾害救援;轮腿变形;机器人;总体设计
Key words: disaster rescue;wheel leg deformation;robot;overall design
中图分类号:TP242 文献标识码:A 文章编号:1006-4311(2020)01-0211-04
1 研究背景
1.1 课题工程背景和意义
随着世界各国对国家安全、社会治安等公共事业的高度重视,以消防灭火、排险救援、运输物资等为特征的灾害救援机器人的需求日益凸现。针对作业路面的凹凸不平等复杂情况,就需要机器人要具备良好的地形适应能力和高效自主的运动模式。根据行走方式的不同机器人可以分为轮式、腿式、履带式和混合式等多种形式。轮式机器人在较为平坦的路面可以保持较高速度移动,但是在非结构化的路面会存在无法越障的缺陷[1]。反之,腿式机器人在凹凸不平的障碍路面相比轮式机器人则更胜一筹,如果将轮式和腿式相结合可以综合两者的优点并拟补缺点。轮腿式机器人具有行动敏捷、越障能力强的突出优点,对于国家的灾害救援和军事发展都具有重要的研究意义[2]。
1.2 国内外研究现状与发展趋势
由于轮腿式机器人其灵活便捷的功能,近几年吸引了国内外的学者对此进行了广泛研究。早期研究成果多集中于航天探测领域,比如行星探测车,前苏联研制过可越障的行星探测车Lunokhod-1,瑞士联邦理工学院通过在车身中设计一款平行四边形机构来适应路面障碍,可以提高车轮进行越障动作,研制出了一款轮腿式机器人Shrimp-Ⅲ Robot。美国JPL通过设计柔性底盘的方式来适应不同的地面环境[3]。日本千叶理工学院曾经研制过采用轮腿分离方案的机器人Halluc-Ⅱ,可以进行步态和滚动两种方式的运动。
国内对于轮腿式机器人的研究起步时间较晚,在上世纪八十年代国家确定了相关的发展方向,国内的研究机构开始逐步设计研制出了国产的轮腿式机器人。哈尔滨工业大学研制了HIT-HYBTOR机器人,重庆大学利用滚珠丝杠研制了较为新颖的轮腿式机器人Rolling-Wolf。在国家的进一步大力支持下,近几年相关领域研究成果更为突出,各个研究单位呈现出异彩纷呈的局面。北京信息科学大学的仝如琳等人设计了一款新型变形轮结合行星轮的机器人轮腿组合结构,来实现机器人在平整路面工作的同时也适应在阶梯、沟壕等非正常路面工作[4]。天津中德应用科技大学的朱雅乔等人开发了一款六轮腿机器人,通过蓝牙控制软件连接样机,驱动样机完成了爬坡性能测试样机并能顺利爬过22度的斜坡和13cm高的障碍物[5]。
1.3 课题的创新点
①本文设计研究的机器人能实现轮式与腿式之间的转换,转动轮在电机的驱动下可以完成巧妙的变形过程,在平整的路况上以轮式滚动前进,在凹凸不平的路面上则依靠腿式步态移动,提高了机器人行动的效率。
②本文设计研究的机器人应用范围广泛,在自然灾害、核辐射等各类人工作业的危险环境中具有深入的应用前景;同时,面向于快递运输和军事搬运等方面也极具开发和研究价值。
③本文设计研究的机器人具有模块化的特点,底盘设计有多个安装接口,根据需要可安装不同的零部件,每個组成部分都可拆装重组,这为后期的维修更换和迭代设计创造了良好条件。
2 总体方案设计
2.1 技术路线
本文设计的轮腿变形机器人具有平坦路面快速移动的优异机动性能,拥有复杂非结构环境下的良好越障能力,在灾害救援、物资运输等领域具有广阔应用前景。在灾害救援方面,可以适应废墟、塌陷等多种恶劣环境,替代救援人员进入危险区域展开救援行动,或作为救援搜寻的先遣力量有效掌握灾害破坏情况[6]。在物资运输领域,民用中可以有效解决快递的“最后一公里”派送问题,将小型货物派送至客户家门口;军用中借助机器人的灵活性和隐蔽性,在崎岖山路的重要物资运送问题上可以发挥出巨大力量[7]。
针对广阔的发展前景,制定具体的机器人技术路线,完成具体方案设计。首先,了解轮腿变形机器人的研究背景和发展趋势,掌握现有的轮腿变形技术,针对现有不足开展新的方案设计工作。其次,针对轮腿变形机器人的实用性功能设计总体的技术方案,本机器人应具有轮式滚动、腿式行走、目标操作和环境监测等基础功能。然后,针对关键的轮式和腿式的变形技术进行设计,优异的变形能力是本文的研究重点和难点。接下来,针对总体方案,完成分系统设计,主要包括驱动系统、转动轮、底盘和操作臂四大分系统。最后,根据实际环境对模型进行修正补充,完成整个轮腿变形机器人的设计工作。
2.2 系统组成
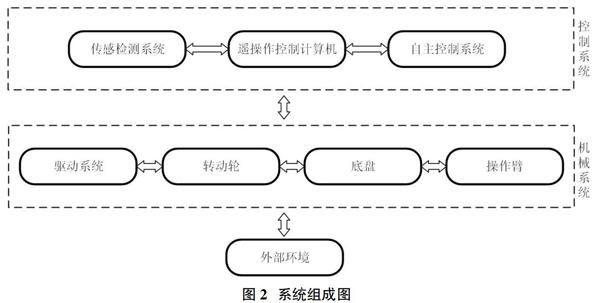
本机器人主要由机械系统和控制系统两大部分组成,其中机械系统包含驱动系统、转动轮、底盘和操作臂,控制系统包含传感检测系统、遥操作计算机和自主控制系统。传感检测系统负责检测感知环境变化情况,主要由摄像头、温湿度传感器、空气质量分析传感器和距离测量传感器等组成;遥操作计算机主要用于人工远距离遥控操作使用,针对机器人无法自主抉择或者难度较复杂的场景可转为人工遥控;自主控制系统主要功能是根据作业前设置完毕的程序,机器人可以自主规划行动路线、轮腿自主切换和自主学习。
机械系统是本文的研究重点,驱动系统主要提供机器人作业的动力来源,由电机及相应传动部件组成;转动轮在平坦路面为轮式滚动部件,当遇到障碍或凹凸路面时,通过变形设计转变为腿式部件;底盘是整个机器人的支撑架体,负责全部的重量和大部分的部件安装定位,其上满足多种安装接口要求,可以满足模块化的装配过程;操作臂是机器人作业过程中的有效执行机构,可以抓取移动目标物体,辅助完成作业任务。
3 关键变形过程的设计
轮腿变形机器人的研究重点和难点是轮式和腿式的变形方案设计。轮式移动依靠的是圆形轮子,腿式行走使用的是具有活动铰链的连杆机构,将圆形轮子和连杆机构进行变化分析。自然界中的节肢动物是典型的依靠节肢的腿部进行移动的生物,其具有多个关节的腿部结构变化灵活、行动敏捷,这为轮腿变化提供了创新性的思路。本研究以此为思路设计提出了轮腿式的变形方案,将圆形轮子在整个圆边上平均分为三分,如图3所示。分别标记为1、2和3,1和2之间、1和3之间通过转动副相连接,转动副可以在舵机的带动下转动,2和3之间为可拆卸活动连接。当整体构型为圆形时2和3之间固定,三部分组成了轮式移动的轮子;当遇到路面障碍时,轮子变形为腿,2和3之间的可拆卸活动连接分开,在舵机的驱动下3相对于1发生转动折叠,2相对于3发生转动形成了由1和2构成的腿。
进一步的将整个变形过程进行面向实际情况的详细设计,运用三维设计软件设计模型。如图4中的左图所示,变形轮均分为三部分,整体呈现圆形结构。在1和3之间通过圆柱形的变形电机连接,在1和2之间通过安装于1上的舵机转动连接,2和3之间则是机械限位。
对比图4中的右图可以发现,整个变形轮结构紧凑、轻巧,三部分分别为框架结构大大减轻整体重量。整个变形轮共有两个驱动源,分别是变形电机和舵机,变形电机与蓝色部分固定连接,可以驱动黄色部分相对蓝色部分转动;舵机固定于蓝色部分的舵机支架上,可以驱动红色部分相对于蓝色部分转动。变形轮中间部分可以与机器人本体的电机相连,电机转动可以带动变形轮的转动来完成机器人的快速移动。
变形完成后,如图5所示。变形轮中的1变为腿部结构的大腿,即蓝色部分,2变为腿部结构的小腿,即红色部分,3则成为收拢臂,为黄色部分。行走过程中依靠大腿和小腿及其驱动电机配合完成,类似于简单的人体腿部结构。当需要迈步前进时,位于原来变形轮中间和机器人本体的驱动电机驱动大腿和小腿抬起,原来的舵机驱动小腿相对于大腿抬起,两种动作结合完成迈步动作。这样在机器人的底盘上安装四组变形轮结构,常规条件下机器人使用轮子快速前进,必要条件下可以变形为腿式结构,迈步前进。
4 分系统的设计
4.1 驱动系统
根据实际的越障和移动要求,驱动系统应该可以稳定的驱动转动轮转动和腿式行走时大腿的摆动,另外,轮式变为腿式后要求大腿应该具有相对于底盘摆动和旋转的两个自由度,以便满足正常行走步态和越障需求。如图6所示,为驱动系统的结构示意图,接口端用于和转动轮的中心固定连接,电机1通过同步轮带动转动轮转动,同时电机1与电机支架固定,电机支架在电机2的驱动下可以相对于底盘进行一定范围的转动。这样,在腿式行走时电机1可以控制大腿摆动的自由度,电机2可以控制大腿相对于底盘转动的自由度。
4.2 转动轮
转动轮在轮式移动过程中外形表现为轮子,在腿式移动过程中外形表现为行走腿,具备在电机控制下的变形能力,具体的结构示意图如图4所示。整体框架由三部分组成,分别对应腿式状态下的大腿、小腿和收拢臂;具有两部驱动电机,分别是连接大腿和小腿的舵机和控制收拢臂的变形电机。整个机器人安装有四部转动轮,前端两部和后端两部相对于底盘中间平面呈对称安装,四部转动轮结构一样,具备模块化特征,可以在必要情况下互相替换。
4.3 底盘
底盘相当于机器人的躯干,整个机器人的重量和外界环境的冲击情况都需要底盘负担。底盘还应保证整个机器人的稳定性和精准度,具有优良的抗变形能力,同时,底盘需要具备多种安装接口,相当于模块化设计中的模块安装板。针对底盘结构的重要使用情况,选用航空铝作为其加工材料,航空铝具有高刚度和低密度的突出优点,可以在保证机器人稳定性的基础上展现出灵巧、轻便的重要特性。
底盘接口设计图如图7所示,整个底盘结构为一个8mm的航空铝材板,为减轻重量前端和后端加工出了较大凹槽。在底盘上具有多种安装接口,目前设计安装驱动系统电机支架的电机接口,安装操作臂的接口和安装传感检测系统的接口,针对实际情况底盘保留有加工更多其他接口的条件。
4.4 操作臂
操作臂主要用于机器人在作业任务中移动和夹取小型货物,属于机器人的有效执行系统[8]。操作臂安装于底盘前部,具有三个自由度,具有简易、灵活的基本特点,可以完成简单的作业任务。操作臂的夹持手爪采用机械原理中常见的连杆机构设计,经过大量的实际应用检验,这种连杆设计常规有效。整个操作臂是一款简单小型的机械臂,有三部驱动电机可以带来两个自由度的运动。如图8所示是操作臂的结构示意图,关节1安装于底座上,底座通过螺钉固定于底盘上,三个关节都可以在电机控制下转动,为夹持器提供了三个自由度。因此夹持器可以敏捷轻便的夹取到所需的东西。不仅可以用来运送东西,也可以在灾难救援中清理现场。
5 结论与展望
本文设计了一种面向灾害救援的轮腿式变形机器人,可以根据实际路面情况在轮式转动和腿式行走两种状态之间切换。整个机器人的机械系统主要由驱动系统、转动轮、底盘和操作臂四大部分组成。本文提出了一种轮腿变形的方法,设计了具体的转动轮结构,系统性的构建了一款轮腿变形机器人,该机器人具有模块化、轻量化和灵巧性的突出优点。在灾害救援和物资运送中具有广泛的应用前景和价值。
但是由于研究时间和知识储备的有限,本文的研究还有一些需要进一步设计的方面。例如操作臂夹持器的传动设计还不够细化,目前仅仅具备了初步功能,夹持器尺寸和具体结构上还需要严谨设计和计算来确定大小重量等。变形轮的变形过程虽然取得了比较显著的效果,但是对于变形轮的驱动系统确实比较大的考验,尚需要进一步的驱动能力校核计算。此外,控制系统是整个机器人的运动中枢,本文仅设计出了控制系统的基本架构,存在深入优化设计的空间。还有一些方面仅提出了一种构思,尚需通过实际的计算和实验来检验其在实际生活中的适用性。
参考文献:
[1]田海波,等.轮腿式机器人设计与其运动特性分析[J].机械设计,2010,27(6):41-47.
[2]潘希祥,等.具有悬挂系统的轮腿式机器人设计与分析[J].机器人,2018,40(3):309-311.
[3]谢哲东,等.轮腿式越障机器人的研究及发[J].机械工程及自动化,2017,37(1):219-220.
[4]仝如琳,等.一种轮腿式复合机器人[J].北京信息科技大学学报,2017,33(4):82-85.
[5]朱雅喬,等.六轮腿机器人样机的构建和测试[J].湖州职业技术学院学报,2018,5(3):84-86.
[6]马武芳,等.主动悬架轮腿式全地形移动俯仰姿态闭环控制[J].农业工程学报,2018,34(20):20-25.
[7]曲梦珂,等.军用轮、腿混合四足机器人设计[J].兵工学报,2018,39(4):788-796.
[8]张礼华,等.新型轮腿式地面移动机器人的结构设计与运动特性分析[J].中国机械工程,2015,26(21):2867-2872.
