几种可观性分析方法及在惯导中的应用
2020-02-07赵立军肖锋刚黄环陈广辉
赵立军 肖锋刚 黄环 陈广辉
摘 要:惯性导航系统中可观性分析是其中非常重要的部分,根据系统要求科学的选择可观性分析方法是非常重要的。现有的几种可观性分析方法有奇异值判断法、状态值解耦法等方法,而将奇异值判断法和Ky30BK0B方法联合一起使用能够达到更好的分析效果,具体选择依情况不同再做决定。
关键词:可观性分析;惯性导航系统;初始对准误差
1.前言:
初始对准误差是INS主要误差源之一,初始对准误差会在姿态指示、速度和位置信息获取上对系统误差产生影响。惯性导航系统必须经过对准后才能正常导航,而且对准精确度会直接对导航精准度产生影响,在现实中根本无法实现不对准角为零。而对准精度和对准时间之间所存在的矛盾需要通过INS初始对准算开展可观性分析,合理选择状态以及划分状态空间来有效提升初始对准有效性。
2.惯性导航系统:
2.1惯性导航系统:
惯导系统是一种自主式导航系统,具备不依赖任何外部信息、不向外部辐射能量、隐蔽性良好等特点,工作范围和应用领域广泛能够在地面、水中以及空中等很多复杂环境中展开工作,主要有平台式和捷联式两种不同类型。
2.2捷联式导航系统:
其中捷联式惯导系统简称SINS,由三个速率陀螺、三个线加速度计和微型计算机所组成的,属于无框架系统。它的发展变化更多的是在平台式惯导系统基础上而来的,其中速率陀螺仪主要测量运载体的角运动信息,而线加速度计则是用来测量运载体的线运动信息,这两者都是可以直接固连在运载体上。捷联式惯导系统本身具备体积小、重量轻、结构简单、成本低、可靠性高以及维护简单等特点,随着技术的不断发展进步捷联式惯导系统本身还在不断优化过程中。
2.3可观性分析:
对于整个控制系统理论来说可观性分析是其中的基础所在,主要是对系统状态是否可估进行分析。而系统的可观性主要反映了状态或参数的内在属性,对于状态和参数估计具备非常重要的影响作用,想要更好的实现正确估计就需要实现系统状态和参数可观的准备。
2.4可控性和可观性的对偶关系:
系统能控性主要是对输入U(t)与状态X(t)之间的关系进行研究和分析,而能观测性主要是对输出y(t)与状态X(t)的关系进行研究,能控性和能观测性在概念、判断依据等很多方面都具备相似性,这两者之间存在一定的内在联系。
3.惯导系统中的可观性分析方法:
其中惯导系统本身可以被归类为是一种非线性系统,而针对于非线性系统的客观性分析从目前具体状况上来说还没有具体通用有效的方法,一般来说所得出的结论大多只具备理论意义,很难能够对具体的工作提供切实有效的指导作用,这时就需要试着将两种方法结合在一起进行可观性分析,弥补单个方法所存在的不足。
3.1全局可观性分析:
针对惯导系统中的可观性分析方法中可以使用全局可观性分析方法,将原始非线性模型作为对象,避免线性化所带来的的近似误差,整个过程非常的简单明了,同时物理意义也非常明确,能够从根本上起到拓展惯导系统线性控制理论分析方法的意义。通过使用全局可观性分析方法能够更好的研究惯导系统估计的可观性问题。
3.2状态方程解耦分析法:
此种方法通过将状态进行分解,之后送到各自相对应的子空间中,最终得到确定的可观状态。但该方法具备非常大的缺陷那就是它只是一种定性研究方法本身具备非常大的主观性。
3.3奇异值判断可观性:
系统可观阵奇异值在经过相关分析之后能够确定系统可观测性的,一般来说当某个奇异值大小正好为零时系统此刻将处于不可观状态。奇异值大小能够判断出状态可观测的程度,奇异值大小和状态可观性之间成正比关系,当奇异值越大时状态可观性也就越好,但所得出的结果一般只能得出状态可观与不可观的数量,但无法确定到底哪些状态不可观、哪些状态可观。
3.4Ky30BK0B定义的可控度和可观度:
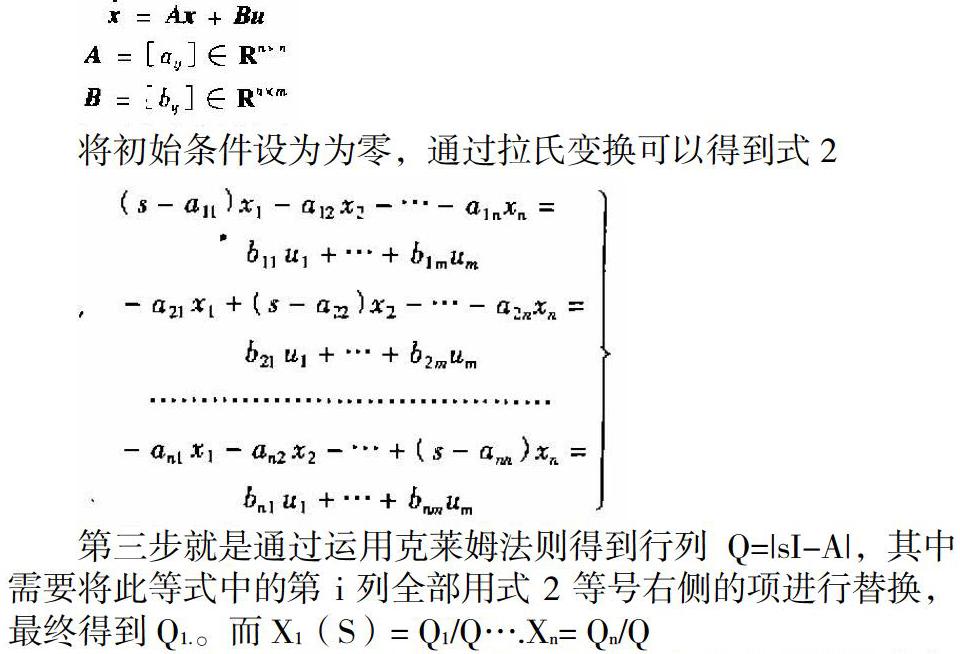
此种可观性分析方法一般和奇异值判断可观性两者联系在一起使用以便达到更好的使用效果的,通过计算所得出的最终结果不仅仅可以判断出系统的可控性还能够看出每个状态变量的可控性和可控程度,而想要计算和判断可观测性还需要判断其对偶系统可控性来得出。比如说是在判断可控性的过程中运用此方法首先需要对系统可观性判断方法进行分析,考虑到定常系统得到式子1:
将初始条件设为为零,通过拉氏变换可以得到式2
第三步就是通过运用克莱姆法则得到行列Q=|sI-A|,其中需要将此等式中的第i列全部用式2等号右侧的项进行替换,最终得到Q1.。而X1(S)= Q1/Q….Xn= Qn/Q
当系统处于完全可控状态时,需要满足的充要条件就是Q1…Qn,在复数域内线性无关。当至少有一个行列式Q1等于零;至少有一个行列式为另一个常数倍;一个行列式可用其他行列式线性表示等情况下系统会处于不完全可控的状态。
3.5基于线性控制系统结构分解理论和奇异值结合的判断惯性导航系统可观性分析方法:
在此基礎上进行系统可观测性计算,维数会呈现出线性关系,通过奇异值对可观性进行判断,最终确定系统的客观状态维数和各状态可观程度,这两种方法相结合对惯性导航系统进行可观性进行分析能够有效得出最佳的不可观状态的组合。
当然通过两种或几种方法相组合的方式对惯性导航系统进行可观性分析能够很好的弥补单个方法所存在的缺陷,比如说奇异值判断可观性的方法和Ky30BK0B相结合能够很好的弥补奇异值判断可观性本身所存在的只能确定可观和非可观的数量无法辨别具体可观量的缺陷。而奇异值判断可观性分析方法也能够和基于线性控制系统结构分解理论两者相结合能够很好的判断出最佳的不可观状态的组合,为系统运行提供可靠数据。
结束语:
总的来说在现阶段针对惯性导航系统的可观性分析过程中,每一种不同的可观性分析方法都有各自的优势和不足,但相对而言奇异值判断可观性的方法运用会相对角度哦,但奇异值本身也很难能得出哪种状态可观或不可观,还需要根据情况不同和其他几种方法相结合进行可观性分析,弥补其不足。总体来说现有几种分析方法都存在一定的不足,很难能够十分准确的做出预估和判断。
参考文献
[1] 王丹力,张洪钺. 几种可观性分析方法及在惯导中的应用[J]. 北京航空航天大学学报,1999,25(3):342-346.
[2] 王新龙,申功勋. 惯导系统可观性的全面分析研究[J]. 航天控制,2002(03):15-20.
[3] 谢波,裴听国,万彦辉. 捷联惯导系统动基座对准中的可观测性分析与研究[J]. 战术导弹控制技术,2004(4):39-44.
[4] 王新龙,申亮亮,谢佳. 捷联惯导系统任意方位两位置的对准模式[J]. 红外与激光工程,2008,37(2).
[5] 王运红,翟传润,战兴群,et al. 一种新的捷联惯导系统动基座对准中的可观测性分析法[J]. 上海交通大学学报,2008(05):163-167+172.
[6] 于家成,陈家斌,徐学强,et al. 捷联惯导系统多位置可观性分析[J]. 北京理工大学学报,2004,24(2).
