城市快速路交织区控制策略研究综述*
2020-02-07谢济铭彭博蔡晓禹唐聚张媛媛
谢济铭, 彭博,2, 蔡晓禹,2, 唐聚, 张媛媛
(1.重庆交通大学 交通运输学院, 重庆 400074;2.山地城市交通系统与安全重庆市重点实验室, 重庆 400074)
随着汽车保有量的连年增长,连接城市各组团的主动脉——城市快速路在节点区域经常发生交通拥堵。快速路交织区由于其交通流复杂性及自身组成的特殊性,成为快速路拥堵的主要节点,大大制约了快速路功能的发挥。随着城市交通的愈发复杂,交织区占比上升,交织复杂度逐步升级。对交织区交通流进行合理控制,可减少或避免交织区由于换道等产生的交通问题,其中如何实现高效交通控制策略是交通完善的关键一步。国内外学者在交织区、分流区、合流区等区域交通流特性方面展开了大量研究,取得了一系列成果,包括通行能力、服务水平、车辆行为、几何构型、安全分析、仿真分析、控制策略等。但针对交织区内部控制的相关研究较少。该文从运行特性、安全特性、控制策略三方面综述交织区控制策略,研究交织区多途径协同控制策略,为提升交织区运行效率提供借鉴。
1 交织区运行特性
交织区运行特性分析的目的是描述交通流特性和运行状态,运行特性主要包括几何特性、交通流特性、车辆行为特性三方面。
1.1 交织区几何特性
国内外学者大都从几何长度、匝道间距两方面对交织区几何特性展开研究,主要通过元胞自动机理论、微观仿真等方法,提出交织区长度、匝道间距等建议值。例如:文献[1]提出了一定交织交通量和服务水平下交织区长度的取值上、下限;文献[2]建立连续多次换道的轨迹模型,计算了分流区合理长度;文献[3]通过定量模型公式变形,给出了匝道间距推荐区间;文献[4]构建了先入后出型匝道最小间距计算模型,并提出了间距推荐区间;文献[5]建立了高速公路主路和同侧匝道出入口的最小间距模型,并提出了指标值。
1.2 交织区交通流运行特性
1.2.1 交织区运行状态
主要从交通参数建模分析、交通状态判别两方面展开交织区运行状态研究。在交通参数建模分析方面,文献[6]提出了交织区影响下合流区车头时距的绝对值韦布尔分布模型;文献[7]提出了交织区速度改进回归模型;文献[8]得出了匝道出入口、合流区、分流区的车辆运行速度与交通量之间的影响关系。交织区交通状态判别方面的研究文献则相对较少,文献[9]建立了基于BP神经网络的快速路交织区运行状态判别模型;文献[10]研究了单双平行式汇入匝道情况下主线交通流的运行状态,进而判断合流区的交通状态。
1.2.2 交织区通行能力
交织区通行能力研究主要从以下三方面展开:1) 匝道布置形式对通行能力的影响。文献[11]研究得出出匝道车辆对交织区通行能力的影响比入匝道车辆的影响严重;文献[12]分析了匝道布置与车道平衡设计对通行能力的影响。2) 交通流特性对通行能力的影响。文献[13]~[15]分别提出了交织区交织流量比、交织区长度等参数与通行能力的关系模型。3) 通行能力模型改进。文献[16]~[18]在既有规范(HCM、通行能力手册等)中通行能力模型的基础上提出了改进模型。
1.2.3 交织区服务水平
目前交织区服务水平以密度为主要指标,有研究提出应将负荷度、综合交通量等指标纳入服务水平指标体系中,以全面反映综合服务水平。文献[19]归纳总结了快速路A类交织区服务水平划分标准;文献[20]以负荷度为主要指标、密度为次要指标,提出了更细化的交织区服务水平划分标准;文献[21]在HBS 2015的基础上,将合流、分流和交织区作为整体对象,提出以综合交通量与通行能力之比定义总路段服务水平的改进模型;文献[22]认为各方向交通流量对交织区密度的影响最显著。
1.3 交织区车辆行为特性
在换道行为特性研究方面,目前主要有文献[23]的换道决策模型、文献[24]的元胞自动机模型、文献[25]的马尔可夫换道模型。而对于交织区车辆换道行为的研究则相对较少,文献[26]~[29]基于元胞自动机、回归分析、LWR换道模型、概率选择模型等展开了研究。
在跟驰行为特性研究方面,目前主要有文献[30]的GM跟驰模型、文献[31]的模糊推理模型、文献[32]的全速度差模型、文献[33]的混合速度差模型等,希望通过对微观跟驰行为的建模展现宏观交通流中交通失稳、激波、相变等的非线性特性,解释交通阻塞形成与消散的机理。但以上模型大都未应用到交织区研究中。现阶段针对交织区车辆跟驰行为的研究大都是在成熟的跟驰模型的基础上加以改进,包括文献[34]的考虑拥挤条件、文献[13]的引入交通压力、文献[35]的加减速阶段分类等方法。
1.4 评述
现有交织区研究大多以流量、速度、密度为基础对交织区通行能力、分流及合流影响范围等进行研究,大多聚焦于交织区通行能力等,而对影响交织区交通流运行状态的车辆行为特征的研究相对薄弱。如何采用新兴技术进一步挖掘交织区车辆行为特性,有待更系统、全面地研究。
2 交织区交通安全特性
实施交织区控制策略的目的是保障交织区安全有序地运行,而影响交织区交通安全运行的因素众多。目前对于交织区安全方面的研究包括静态特性和动态特性两方面。
交织区静态研究主要从交织区安全评价、冲突形成机理等方面展开。交织区冲突点的形成是由于交织区内车辆运行时产生车道变换行为,形成分流点、交叉点、合流点三类冲突点,使交织区车辆运行相互干扰,影响交通安全和效率。在冲突形成机理方面,主要从交织区和车道复杂度关系、冲突变化趋势等方面展开研究。
交织区动态安全研究大都针对车辆行驶行为展开。如文献[41]采用自适应模糊神经网络模型模拟车辆跟驰行为,分析交织区安全影响;文献[42]分析车辆特殊驾驶行为的产生机理,得出其对交织区通行效率和安全性的影响;文献[43]考虑临时驶出车辆的影响,结合车辆变道安全间距、变道决策等因素,建立了多车道交织区离散模型。
交织区由于各种交通流的交织会产生大量交通冲突点,导致车速稳定性差、通行能力严重降低。交织区冲突点和几何设计等静态特性,由于其自身特性受先天设计限制难以更改,因而改善交织区交通安全的切入点之一是合理控制交织区车辆行为,而导致交通流交织的源头为车辆行为各异,为深入剖析交织流特性,需进一步研究交织区车辆行为,探寻其行为特性。
3 交织区控制策略
为规范、管理交织区车辆行为,提高交织区整体通行效率,必须采取措施调控交织区车辆运行。对此,国内外学者开展了大量研究。从研究手段来看,对交织区的控制可分为静态控制(static control)和动态控制(dynamic control),其中静态控制主要是针对交织区标志标线进行研究,动态控制则根据实时交通流参数信息进行控制管理,主要有动态匝道控制、主动式可变限速控制、动态协同控制等。从控制对象来看,交织区的控制分为匝道控制、主线控制和综合协同控制。
3.1 匝道控制
3.1.1 单匝道控制方法
单点控制(isolated control)算法主要包括占有率控制(OCC控制)、需求-容量控制(D-C控制)、可接受间隙控制(GAP控制)和ALINEA控制等。其中ALINEA控制算法是Papageorgiou M.在经典控制理论的基础上提出的控制策略,它通过控制主线下游占有率维持在期望值附近,达到主线流量最大的控制目标,目前应用较广泛。
由于ALINEA算法存在实时性与适应性不足的问题,研究者们对ALINEA算法不断进行改进。如文献[47]结合自适应控制原理,提出了对临界占有率进行实时估计的AD-ALINEA算法;文献[48]构建了以控制阈值表、ALINEA算法和匝道排队分段约束模型于一体的匝道单点动态控制策略;文献[49]提出了一种对下游交通瓶颈有较好缓解作用的PI-ALINEA算法;文献[50]运用VisVAP编写以ALINEA感应算法为基础的入口匝道感应控制算法,实现入口匝道交通控制改善。
3.1.2 多匝道协调控制方法
在单匝道控制中,往往由于单匝道容量有限,导致匝道排队溢出,因而需增至多个匝道参与控制以提升排队空间。同时对于多匝道可进行整体协调控制,达到系统最优。自20世纪以来,国内外学者对多匝道协调控制(coordinated control)展开了研究(见表1)。多匝道协调控制算法可对研究路网在整体协调的基础上进行控制,解除单匝道控制对实测数据误差大的限制。但目前多匝道协调控制存在成本高、数据量过大、难以用于实际等问题。
3.2 主线控制方法
常用的主线控制方法有全线统一限速法、局部限速法、分车道/车型限速法、可变限速法等。其中可变限速系统根据道路实时交通状况及环境等因素动态调整信息板上的限速值,实现车流安全、高效、平稳行驶,可优化车辆出行时间、提升出行效率、减少交通事故率。可变限速控制策略分为被动式控制和主动式控制两类。被动式控制起源较早,是基于简单的阈值判断规则进行限速值调整,其对实时交通状况的反应存在一定时滞性,有必要通过预测流量等参数,消除实时交通状态与优化控制之间的时间差,进一步反馈优化,形成闭环反馈,即形成图1所示的主动式控制。文献[67]提出了基于运动波理论的可变限速模型;文献[68]以总通行时间和总周转量为优化目标函数,采取预测性控制框架建模方法建立了瓶颈路段可变限速控制策略;文献[69]基于元胞传输模型,提出了两阶段协调滚动层VSL序列生成方法;文献[70]构建了可变限速多目标优化控制模型,采用基于群智能的差分进化算法求解可变限速值;文献[71]基于交织区的实时安全分析模型计算交织区的碰撞概率,通过替代安全评估模型(SSAM),得出冲突数量、变速装置的速度和位置建议。
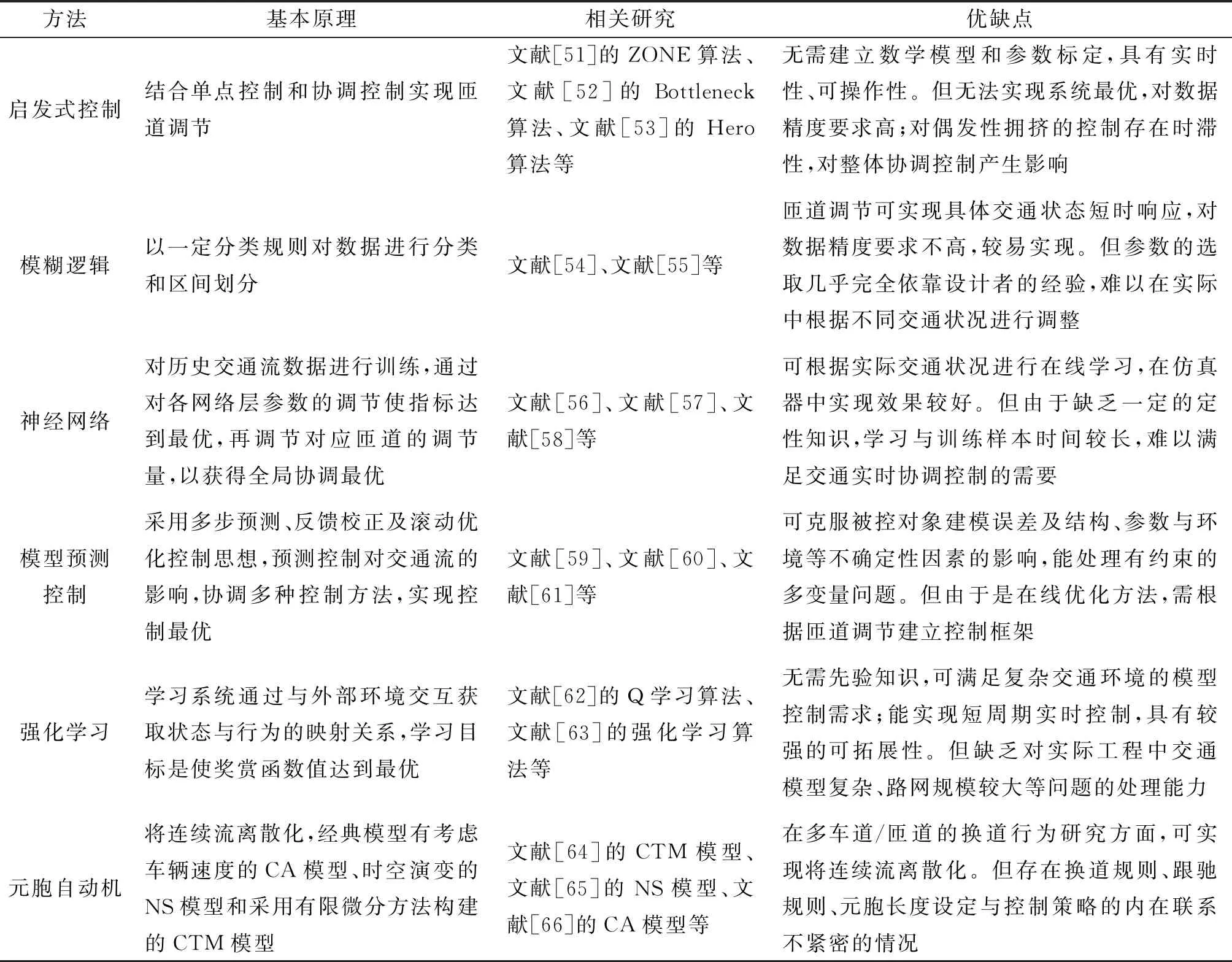
表1 多匝道协调控制方法
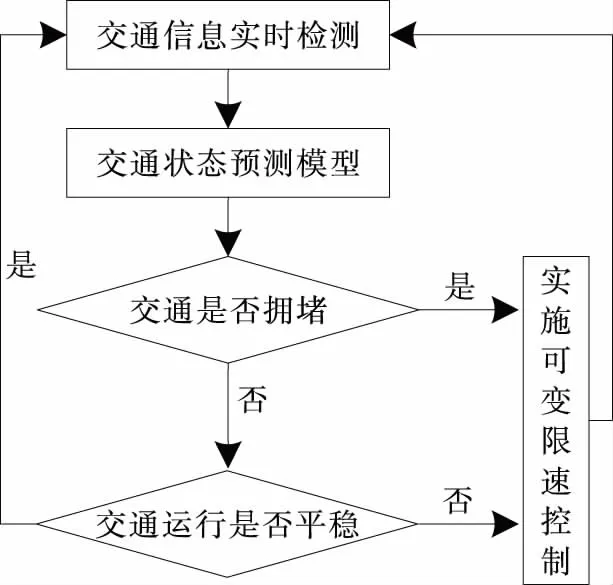
图1 主动式控制流程
目前针对可变限速控制的研究较成熟,由于其灵活性高、可控性好,得到广泛使用。随着车联网、车路协同等技术的逐步应用,可变限速控制将不仅停留在路段层面,还可进行车道单元甚至车辆的可变限速控制。
3.3 交织区综合协同控制
对综合协同控制的研究主要从匝道-主线、匝道-衔接区域(非主线)两方面展开。匝道-主线综合协同控制研究通常基于宏观交通流模型,建立主线限速和匝道调节的协同控制方法。如文献[72]将可变限速与反馈式匝道控制相结合进行高速公路交通流控制;文献[73]实现了可变限速控制影响下对入口匝道的优化控制;文献[74]提出了一种可变限速、匝道控制相协调的控制系统;文献[75]提出了协同主线和匝道最优信号配时模型。
匝道-衔接区域综合协同控制是将匝道与相邻交叉口、辅路等进行协同控制。如文献[76]提出了基于模糊聚类理论的出口匝道辅路控制方法;文献[77]提出了基于MLD-MPC的匝道与下游交叉口多信号自适应控制方法;文献[78]将出口匝道衔接交叉口和辅路统一控制,建立了新的协调控制模型。
此外,部分学者结合路线诱导展开综合协同控制研究。如文献[79]提出了一种结合车队和路线诱导的协调策略;文献[80]提出了一种结合匝道控制和路线诱导两种控制策略的多级控制策略;文献[81]提出了基于动态临界占有率的区域入口匝道协调控制、衔接区域动态诱导方法的关键技术。
纵观国内外相关研究,目前主要利用可变限速控制、路线诱导、匝道控制和车道控制等手段对交织区交通流进行综合协同控制,对于考虑车辆行为特征的交织区个体车辆及交织影响区交通流的精准调控还需进一步研究。
3.4 评述
目前主要利用匝道控制、可变限速控制和综合协同控制等对交织区及其影响范围交通流进行调控,对于交织区自身控制的研究较少,对交织区内部与主线、匝道协同控制的研究是一个重要发展方向。就控制对象而言,除少数车路协同、车联网环境研究外,目前基于微观研究的控制方式尚停留于对车队或车流的集群控制,对采用新技术结合交织区个体车辆实现车路协同控制还需进一步研究。
4 快速路交织区协同控制框架
城市快速路交织区控制策略研究具有重要的实践和理论意义,而当前对多途径(交织区及其影响范围多种控制手段相结合)综合协同控制的研究较匮乏。在国内外研究的基础上,基于交织区高效和安全运行的思想,以平稳运行、提升服务水平和通行能力为控制目标,建立图2所示城市快速路交织区协同控制策略框架。
为实现交织区协同控制,首先提取交织区及其影响范围内流量、排队长度、占有率、行驶车速、拥堵发生点等宏观交通信息,车辆轨迹、瞬时速度、加速度、车头间距及车头时距等微观交通信息,分析交织区运行特性与安全特性。其次预测匝道、主线上游和交织区内部3个区域的交通运行状态,若各区域交通运行均畅通有序,则继续提取交通信息;否则,借鉴现有交织区控制策略研究成果,结合各控制对象和方法的特点,根据各区域交通状态制定相应控制策略。
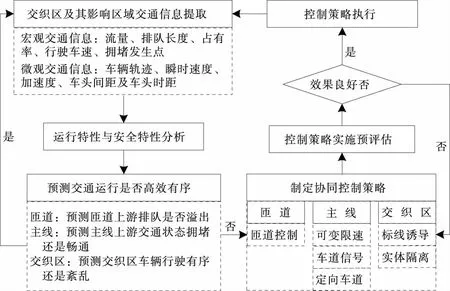
图2 城市快速路交织区协同控制策略框架
为保证控制策略的实施效果,在策略实施前进行预评估,若能达到预期控制效果,则直接执行;否则,重新制定控制策略。根据控制效果评估结果,实施控制策略。与此同时,继续采集实时交通信息并进行分析,组成一个闭合的循环,形成协同控制策略框架,实现多对象的联动控制。协同控制方案布局见图3。
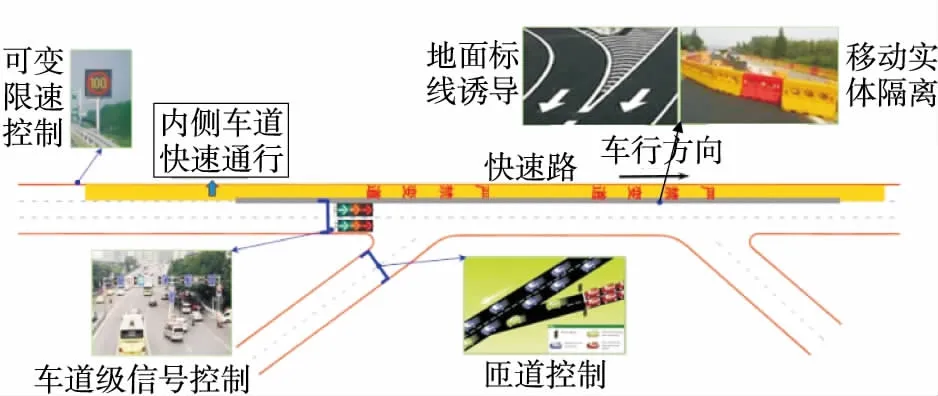
图3 交织区协同控制方案示意图
5 结语与展望
该文围绕交织区控制策略对城市快速路交织区运行特性、交通安全特性、控制策略等相关研究进行综述,初步建立以主线、匝道、交织区协同为核心的城市快速路交织区协同控制框架,以推动控制策略朝多目标、多途径方向发展。由于交织区车辆行为和运行状态复杂多变,对于控制的实时性和精细化的要求较高,国内外学者对交织区的研究思路也不尽相同,各类方法、模型的普适应不强,今后可从以下几方面进一步完善:
(1) 交织区内部控制。目前的研究大多针对匝道和主线,对交织区内部控制的研究寥寥无几。下一步研究可通过设置地面标线、移动隔离等管理手段,规范交织区车辆行驶行为、规避冲突点,实现几何设计优化。
(2) 协同控制。针对交织区及其影响范围需要控制的对象群,根据主线、匝道、交织区等控制对象的不同特性,制定涵盖可变限速控制、路线诱导、车道控制、匝道控制、移动隔离等的协同控制策略,实现一体化控制。
(3) 车联网、车路协同环境下的控制策略研究。目前车联网技术已成为全世界争相发展的创新技术,为车路协同赋予了新的内涵,采用车联网技术结合个体车辆实现交织区车路协同控制,是一个重要发展方向。
