一种低功耗海洋定位信标的研制与应用
2020-02-07姜静波刘庆奎陈永华倪佐涛
姜静波, 刘庆奎, 于 非, 3, 4, 陈永华, 倪佐涛
一种低功耗海洋定位信标的研制与应用
姜静波1, 2, 刘庆奎1, 2, 于 非1, 2, 3, 4, 陈永华1, 2, 倪佐涛1, 2
(1. 中国科学院 海洋研究所, 山东 青岛 266071; 2. 中国科学院 海洋大科学研究中心, 山东 青岛 266071; 3. 青岛海洋科学与技术试点国家实验室 海洋动力过程与气候功能实验室, 山东 青岛 266237; 4. 中国科学院 海洋环流与波动重点实验室, 山东 青岛 266071)
研制了一种低功耗的定位信标, 用于长期服役于水下的海洋仪器回收出水后的定位搜寻工作。信标基于GPS射频组件开发, 与仪器固定在一起, 待整体浮出水面后, 会启动位置信号发送程序, 通过电信网络, 将该信标的实时位置发送至终端。经测试表明, 信标性能可靠, 可为海洋仪器的安全工作和顺利回收提供保障。
低功耗; 定位; 信标
海洋学研究、海洋工程建设、海洋军事活动和资源调查, 都是基于海洋环境监测, 特别是对海洋动力环境进行长期、定点、实时、立体监测。海床基、潜标观测系统工作于水下, 具有隐蔽性能好、维护周期长等优点, 用于进行定点海洋环境监测。由于海床基、潜标观测系统通常集成了很多昂贵的测量仪器, 也存储了大量宝贵的数据, 因此在其布放前必须考虑的问题之一就是后期如何实现系统可靠回收[1]。为解决上述问题, 科学家将信标机集成于需要布放下水的观测系统中, 在回收作业时起到定位作用, 同时也能在系统遭受意外破坏浮出水面后, 起到提示和报警作用。
信标机是一种能够向外界传送特定标识信号的仪器设备[2], 在符合启动条件后, 会自动发送无线电或位置信号, 被外界所感知。早期的信标多以无线电信号发射为主[3], 在观测系统浮出海面后, 信标信号在一定范围内被终端探测到, 回收人员根据各个方向的信号强弱, 判断信标的方位, 沿着信号强的方向逐步去搜寻目标, 但无法获取目标的准确经纬度, 且通信距离有限, 往往局限在10海里范围内。随着移动互联网络、卫星网络的发展, 新一代信标产品均集成了定位芯片和卫星发射天线, 在观测系统浮出海面后, 信标可以通过网络将准确的位置传送给接收机或者固定的网络地址[4-6]。回收人员可以直接前往目标海区, 完成系统的回收工作。市场上比较成熟的信标产品如表1所示。
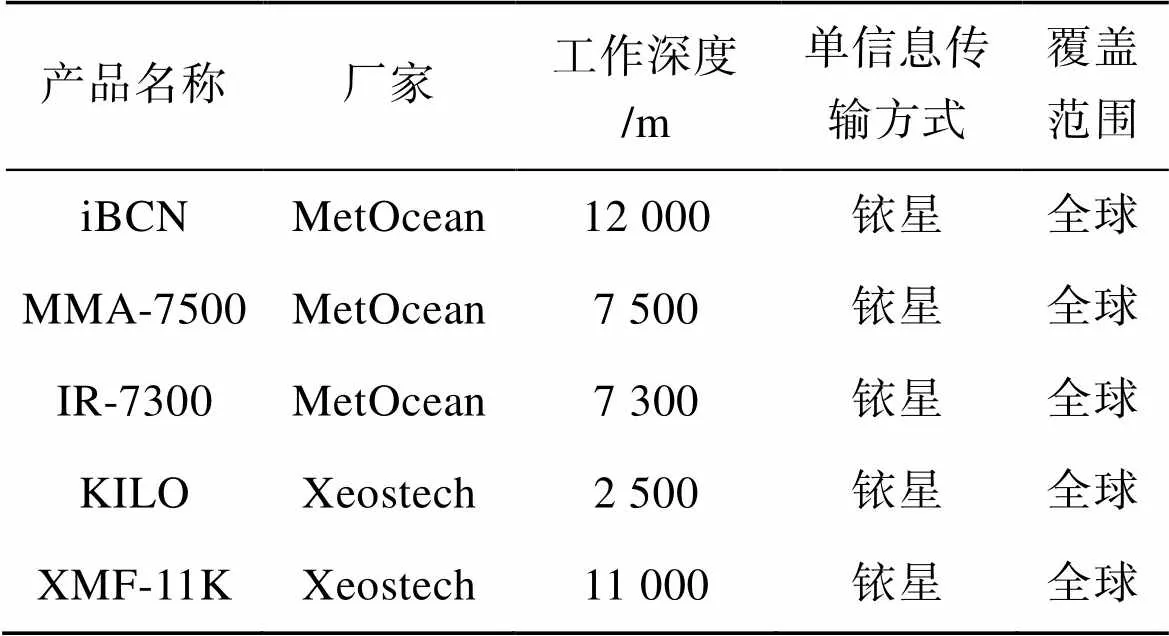
表1 国际上成熟的信标产品列表
随着海洋观测范围的扩大, 目前世界主流的信标产品全部采用了覆盖全球的铱星系统作为信号传输介质, 可服务于深海大洋和极地的水下观测。大多数信标均自带压力传感器, 依靠水压值作为启动的信号开关[7-9]。下水布放之前, 信标会固定到观测系统的顶部架体上, 启动物理开关或电磁开关, 信标处于工作状态; 下水后, 信标内部压力传感器测得水压值大于信标设定的水压值(设定值通常小于1dbar)时, 信标停止工作, 并随观测系统继续下潜到一定深度, 完成长时间的定点观测; 当观测系统处于回收阶段时, 信标机随着系统上浮, 露出水面后, 测得水压值小于设定值时, 信标开始工作, 发送位置信号。终端可以在获取信标机发送的坐标数据后, 快速便捷地搜索到需要回收的观测系统, 实施回收工作。
上述产品虽然可以在全球海域使用, 但价格昂贵, 且在搜寻卫星以及传送信号过程中的能耗较高, 因此主要应用于布放于深海大洋中的高成本复杂观测系统中。在一些近岸或者低成本的观测载体上, 满足观测海区定位和通信需求的低功耗信标产品更具备竞争力, 本文定位于中国近海的水下定点观测, 设计了一种基于北斗和移动电信网络的低功耗、低成本、启动方式特殊的海洋定位信标, 主要服务于海洋牧场建设、海岸工程建设和近海海洋动力过程研究等领域。
1 系统设计方案
有别于目前主流的信标启动方式, 本文提到的信标依靠电极短路和开路操作完成其工作的转换。信标系统由信标发射机和信标接收软件组成。信标发射机包含由控制模块、电源模块和天线模块; 信标接收软件具备终端显示功能、目标定位功能和信息提示功能。系统整体组成如图1 所示。
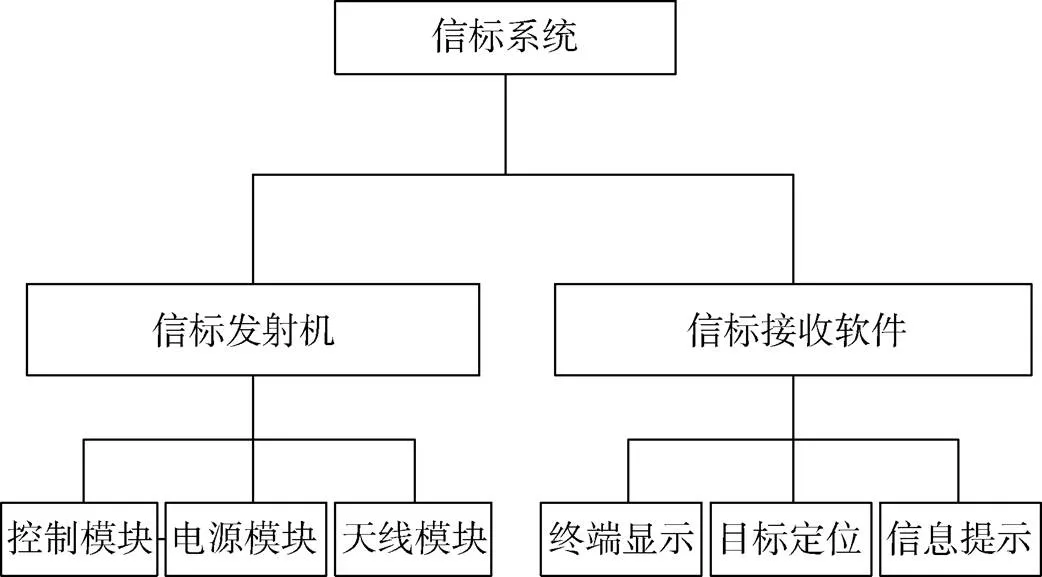
图1 信标系统组成
1.1 信标发射机设计
信标机从结构上细分为舱体顶部端盖、电极、主舱体、信标机主版、电池及舱体底部端盖。信标机外部壳体包括上下两个端盖, 主舱体, 采用聚四氟乙烯材料加工而成。主舱体采用圆筒形结构, 圆筒形结构有助于减小海水对舱体的阻力, 径向耐压性能好, 同时也便于加工。顶部端盖外部有两个金属电极, 用于触发内部的控制电路。
主舱体设计了长度为28 cm的4组串联电池舱, 单块电池需满足D型标准1号电池的外观标准, 即高度为59.0 mm±0.5 mm, 直径为 32.3 mm±0.2 mm。信标机设计了9~18V的电压输入要求, 故采用 4节FANSO34615型号3.6V锂电池串联组成14.4V的电池组作为供电电源。电池舱内部压力感应弹簧的电阻不能过大, 否则会导致电池输出电压达不到系统供电要求。信标机整体结构设计图和实物图如图2所示, 图2左边为设计图, 右边为实物图。
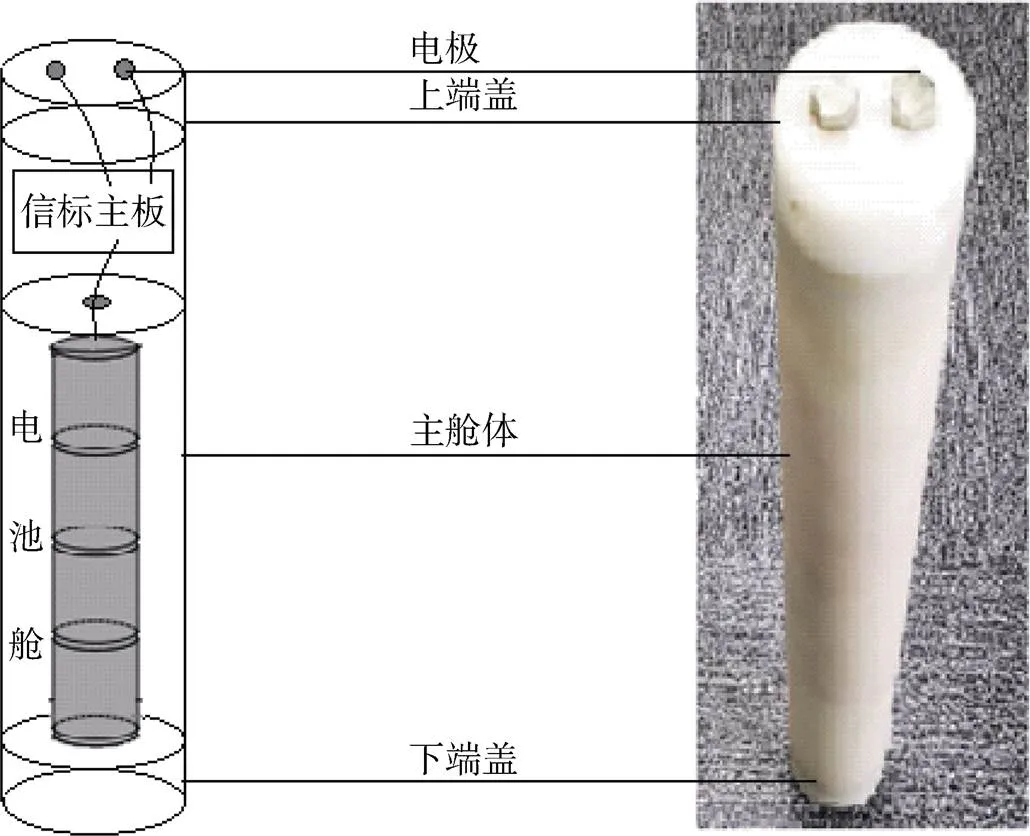
图2 信标机设计示意图与实物图
信标机主板, 包含电源插口、微控制器、GSM卡槽、信号天线等, 启动控制电路版单独设计, 通过馈线连接主板和上部端盖的电极。信标机主板设计尺寸小巧, 长和宽分别为5 cm和 2 cm, 远小于和舱体内径尺寸, 通过舱体的支架固定在仓体内部, 其电源控制芯片满足9~18 V范围内的宽电压输入标准。主板的设计示意图见图3。
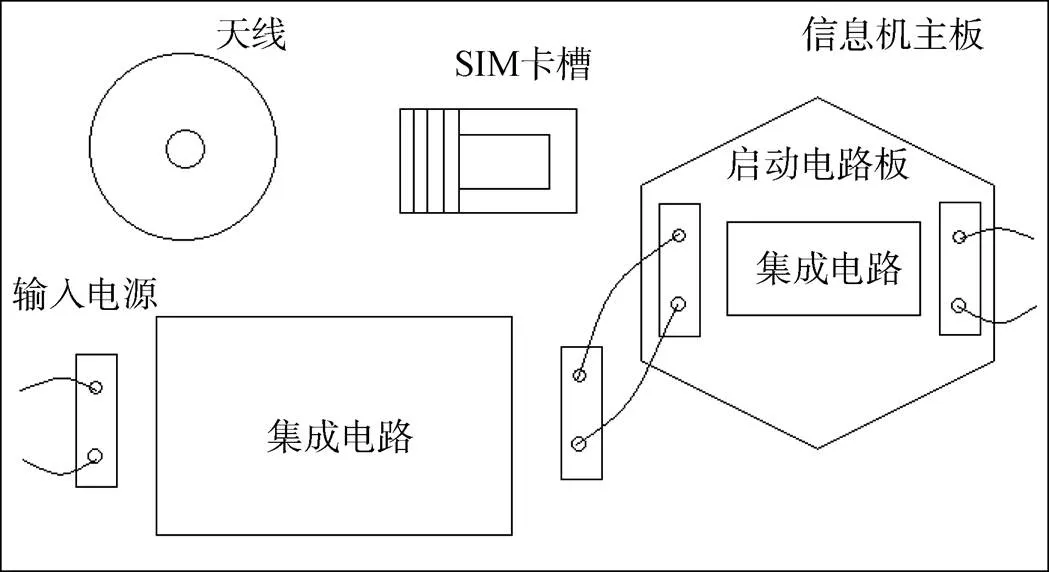
图3 信标机主板示意图
控制模块集成了GPS天线, SIM卡槽, 包含可编程控制器的集成电路, 条件启动电路, 工作时序可以通过软件进行读写设置。其中可编程控制器采用了市场成熟的GPS导航定位控制组件, 定位天线采用成熟的T102GPS模块, 定位精度可达2.5 m以内。条件启动电路的引入是本信标机有别于传统信标机的创新之处, 其电路设计图如图4所示。
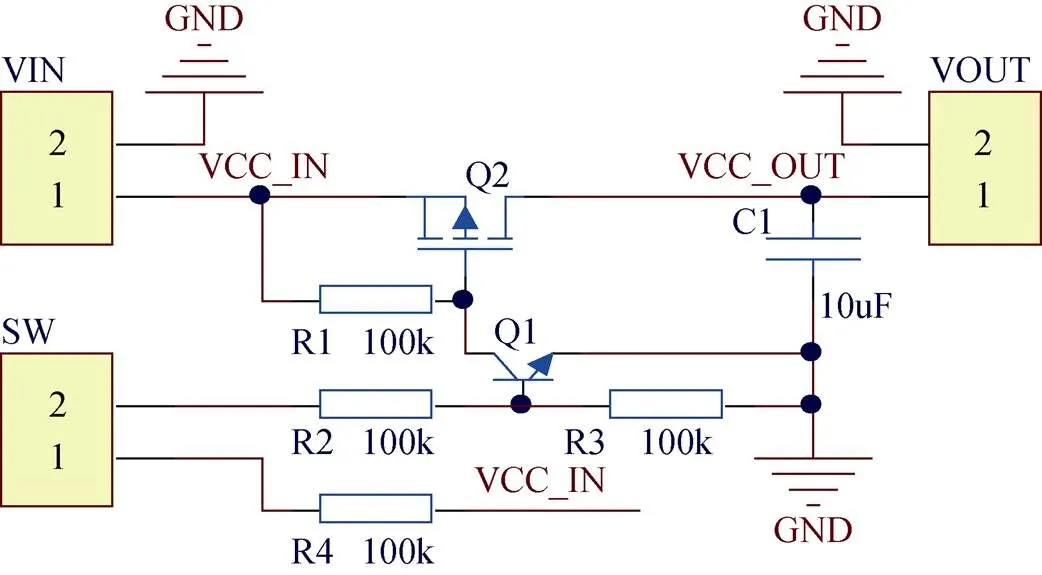
图4 启动电路设计图
条件启动电路利用水中溶解各种电解质产生较多的自由带电离子, 在外加电场下, 带电离子发生定向移动从而具有导电性的原理, SW接口分别连接两个外部导电极, VIN接电池(1接正2接负), VOUT接信标机主板电源(1接正2接负), 电路中R2、R3和R4组成入水导电检测电路, R2与R3组成限流分压电路, 驱动三极管Q1导通。入水前连接SW的两个外部导电极没有导通, R2和R3接地没有电流, 三极管关闭; 入水后由于水的导电性从而有电流从R4经过SW的两个外部导电极流过R2和R3从而产生电压电流, 驱动三极管导通。三极管Q1、PMOS管Q2和R1组成电源开关电路, 控制VIN到VOUT的电源通断, 电流方向为VIN到VOUT, 当三极管Q1导通时驱动PMOS管Q2导通, 连接VOUT的信标机主板电源开启, 当三极管Q1截止时PMOS管Q2截止, 连接VOUT的信标机主板电源关闭。电容C1的作用为当VOUT电源开启以后对电源的杂波和交流成分产生滤波的作用。最终的效果为, 当电极两端没有的导体连接时, 也就是电极两端在海面上处于空气中, 信标处于工作启动状态; 当电极两端存在的导体连接时, 也就是电极两端处于导电的海水中, 信标处于工作停止状态。
在设计上引入了条件启动电路, 首先可使信标机不再需要压力传感器, 节省了整体的采购制作成本; 其次信标机也不需要一直开启内部电源和时钟, 不断读取压力传感器的实时信号值, 节省了电源供应成本; 最后信标机的工作状态依靠外部电极的导通状态来切换, 可避免继电器的使用, 减少了一个中间环节, 节省了时序电路的控制成本。条件启动电路的引入, 从整体上降低了系统的功耗, 降低了系统的成本。与传统信标机功能对比如表2所示。

表2 与传统信标机功能对比表
1.2 接收终端
接收单元由云端服务器和浏览器组成, GSM信号可直接发送至云端, 并开发B/S系统架构的终端接收系统, 实现云端存储, 而且可以根据需求进行批量信标位置的查询和管理。建立云端接收系统的意义在于可以使用户能够方便地在具备互联网的任何地方登陆界面查询信标机的状态, 且同步实现其位置轨迹的追踪管理。接收单元主要由终端显示、目标定位和信息提示功能模块组成, 各模块的功能详细解释如下。
(1) 终端显示模块负责信标机编号、固件版本信息和实时经纬度位置信息的展示予更新。Web程序界面集成嵌入地图组件, 选择需要查询的信标机编号, 可以在地图上呈现信标最近时刻的位置信息, 并可选择展示该信标一段时间内的运动轨迹, 方便设备回收人员对其位置的追踪。
(2) 目标定位模块负责目标信标机与接收终端的实时相对位置展示。通过此功能模块, 设备回收人员可以清晰的获取信标机相对于本人方向和距离信息, 指导目标搜寻工作的快速实施。
(3) 信息提示功能模块负责目标信标机状态的警示展示。通过对比预先设置的电压阈值和位置范围, 一旦信标机的电压低于阈值, 终端会提示能源报警; 一旦信标机的实时的回传位置距离布放位置预先设置的值。
接收端的总体架构分为客户端和Web服务端。客户端浏览器或者移动APP, Web 服务端使用 Express 框架, 采用SQL Server 数据库来存储网络传送的信标数据和用户数据。接收端总体架构如图5所示。
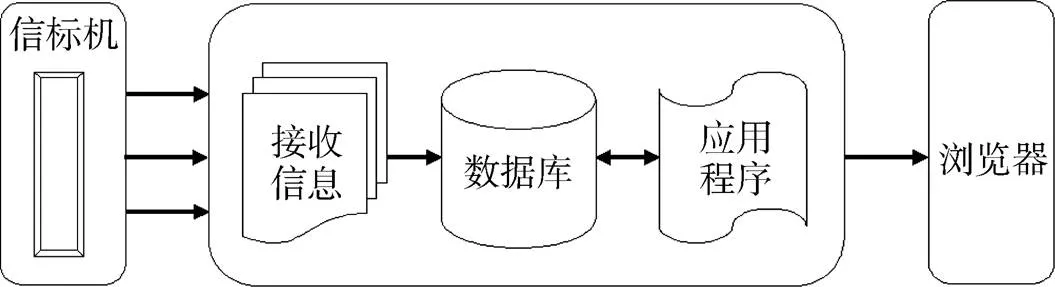
图5 接收端总体架构
2 实验与讨论
为测试信标机的实际定位性能以及在不同地点的通信情况, 2020年1月3日在山东威海海域, 测试人员携带研制信标搭乘船只从威海远遥码头出海, 进行了12个站位的信标功能测试实验, 当日气象状况良好天气晴、微风, 海况二级。信标固定在观测潜标系统的上部, 每次潜标主体出水后, 信标机均位于空气中, 可顺利实现位置信息的发送。
12个测试站位中, 最近的站点在岸边, 最远的站点离岸边36.7km, 整个测试海区、测试路线和站位清楚的呈现在接收端软件上。从出发到返回一共用时500 min, 其中每个站位将信标置于水下测试5 min, 12个测试站位累计60 min, 水下测试过程均无接收信号; 海面测试(含行驶时长)共计400 min, 其中在12个站位累计海面测试216 min, 均接收到位置信号。站位测试信息如表3所示。
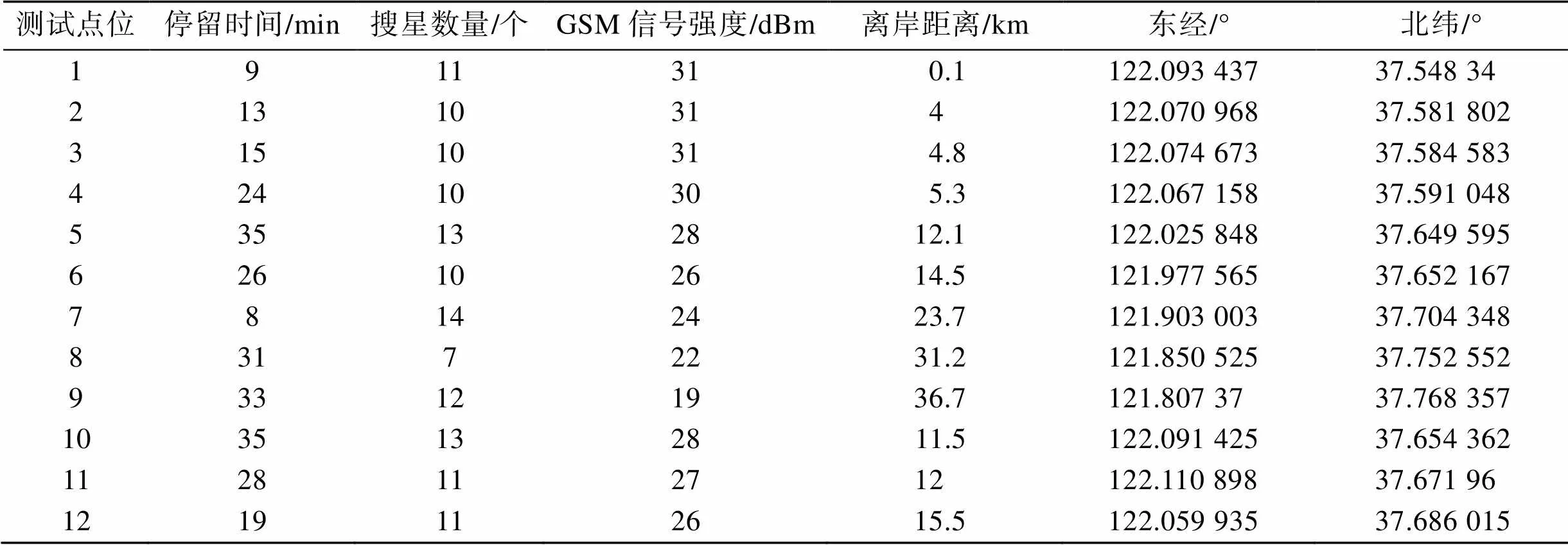
表3 各站位测试信息表
由图6可见, 信标在各个实验站位获取的定位卫星数量以及信号强度有明显差异, 离岸边较近的站点, 搜星数量较多, 最大数量为14, 信号强度总体较强, 最大可达31 dBm; 离岸边较远的站点, 搜星数量较多, 最小数量为7, 信号强度总体较弱, 最小仅为可达19 dBm。上述情况主要和基站的架设位置有关, 由于大部分基站都建在陆上, 因此在远离海岸的区域, 信标的定位能力会有所减弱。
3 小结与展望
本文所提到的低功耗的定位信标, 经过长时间的测试表明, 在有网络信号覆盖的地区, 工作稳定, 以15 s的工作间隔连续发送信号的时长可达60 d。但受置于移动互联基站的限制, 在远海区域特别是手机无信号区域, 该信标无法正常工作。因此, 本产品适用范围明确为离岸20海里以内的区域。在此区域内布放水下观测系统, 本信标作为辅助仪器, 具备极高的性价比。此外, 由于其通过电极开路、短路操作触发启动的方式, 在组件上省掉了压力传感器和继电器, 节省了研制成本, 减少了中间控制环节, 降低了硬件程序设计的复杂性, 同时降低了功耗, 相对传统信标, 在性能上进行了优化。
信标机依靠电极控制工作状态, 而电极会长期工作于水下, 对电极的材料要求严苛。信标机目前电极尝试过的材料类型为316L型不锈钢和钛金属。不锈钢电极成本低, 但受原料和加工工艺的差异, 有个别厂家的不锈钢材料电极在水下工作数月后出现腐蚀现象; 钛金属电极的成本高, 但性能稳定, 水下长时间工作后未出现腐蚀现象。在实际的开发应用中, 设计了上述两种材料的电极, 可方便的进行替换, 使用者可根据实际的工作要求对信标机电极进行合理选择, 完成针对性的订制。
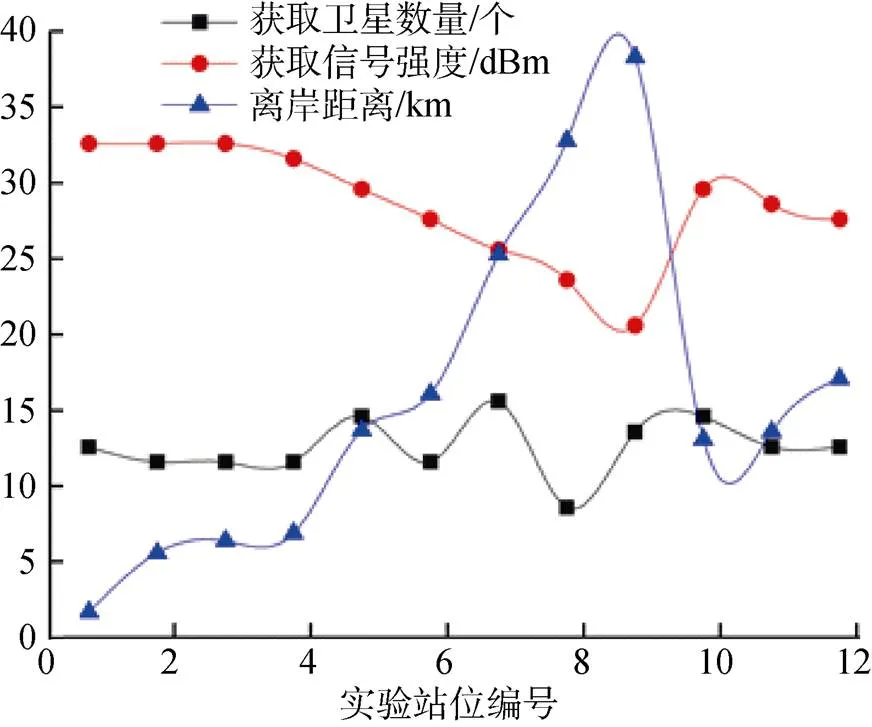
图6 各站位搜星数量、GSM信号强度与离岸距离关系
[1] 张美燕, 周莉萍, 彭学虎. 基于北斗卫星通信与定位的深海回收信标机研制[J]. 浙江水利水电学院学报, 2016, 28(4): 71-75. Zhang Meiyan, Zhou Liping, Peng Xuehu. Deep sea recovery Beacon System Based on Beidou satellite communication and positioning[J]. Jour-nal of Zhejiang University of Water Re-sources and Electric Power, 2016, 28(4): 71-75.
[2] 王海员, 于卫东, 李奎平, 等. 一种海洋潜标适用的新型GPS信标机[J]. 海岸工程, 2011, 30(3): 66-73.Wang Haiyuan, Yu Weidong, Li Kuiping, et al. A New GPS Beacon Designed for Ocean Subsurface Moorings[J]. Coastal Engineering, 2011, 30(3): 66-73.
[3] 于皓博, 单彦虎, 任勇峰, 等. 基于GPS和北斗的高可靠性信标机系统设计[J]. 测控技术与仪器仪表, 2018, 44(7): 94-97.Yu Haobo, Shan Yanhu, Ren Yongfeng, et al. Design of high reliability beacon system based on GPS and Beidou[J]. Measurement Control Technology and Instruments, 2018, 44(7): 94-97.
[4] 张鹏鹏.基于北斗通信与定位的深海回收信标系统研制[D]. 杭州: 杭州电子科技大学, 2018: 5-15. Zhang Pengpeng. Research on Deep Sea Retrieve Beacon System Based on Beidou Satellite Communication And Positioning[D].Hangzhou: Hangzhou Dianzi University, 2018: 5-15.
[5] 王军成. 海洋资料浮标原理与工程[M]. 北京: 海洋出版社, 2013. Wang Juncheng. The Theory and Project of Ocean Data Buoy[M]. Beijing: China Ocean Press, 2013.
[6] 曹立杰, 郭戈. 一种海面传感网节点定位方法[J].控制工程, 2015, 22(5): 815-819. Cao Lijie, Guo Ge. A localization approach for surface sensor networks node[J].Control Engineering of China, 2015, 22(5): 815-819.
[7] 陆永杰. 基于多传感器融合的室外室内连续定位系统研究[D]. 南京: 南京邮电大学, 2019: 2-7. Lu Yongjie. Research on Outdoor/Indoor Continuous Positioning System Based on Multi-sensor Fusion[D]. Nanjing: Nanjing University of Posts and Telecommunications, 2019: 2-7.
[8] 党超群, 张锁平, 齐占辉, 等. 基于北斗卫星系统的深远海GPS波浪浮标数据传输研究[J]. 传感器与微系统, 2016, 35(1): 46-48.Dang Chaoqun, Zhang Suoping, Qi Zhanhui, et al.Research on data transmission of deep and remote sea GPS wave buoy based on BeiDou satellites system[J]. Transducer and Microsystem Technologies, 2016, 35(1): 46-48.
[9] 姜静波, 徐永平, 李思忍, 等. 多参数海洋浮标实时采集系统的设计[J]. 海洋科学, 2014, 38(12): 99-102. Jiang Jingbo, Xu Yongping, Li Siren, et al. Design of multi-parameter ocean buoy data acquisition system[J]. Marine Sciences, 2014, 38(12): 99-102.
Research and development of integrated acoustic monitoring system for marine instrument test field
JIANG Jing-bo1, 2, LIU Qing-kui1, 2, YU Fei1, 2, 3, 4, CHEN Yong-hua1, 2, NI Zuo-tao1, 2
(1. Institute of Oceanology, the Chinese Academy of Sciences, Qingdao 266071, China; 2. Center for Ocean Mega-Science, Chinese Academy of Sciences, Qingdao 266071, China; 3. Laboratory for Ocean Dynamic and Climate, Pilot National Laboratory for Marine Science and Technology (Qingdao), Qingdao 266237, China; 4. CAS Key Laboratory of Ocean Circulation and Waves, Chinese Academy of Sciences, Qingdao 266071, China)
An acoustic release is an oceanographic device for the deployment and subsequent recovery of instrumentation from the sea floor in which recovery is triggered remotely by an acoustic command signal. In this literature, a low-power locator beacon was proposed for searching, locating, and recovering long-range underwater marine instruments. Beacon signals help synchronize, coordinate, and manage electronic resources using miniscule bandwidth. The proposed beacon was designed and developed based on a GPS system and usually fixed with a marine instrument for offshore operation. When the instrument emerges from underwater to the surface, the program for sending the position signal gets activated through the telecommunication network, and the signal of real-time position of the beacon sent to terminals is synchronized with the receiver. The experiment results showed that the beacon had a reliable performance and can guarantee the safe operation and smooth recovery of marine instruments.
low power consumption; positioning; beacon
Mar. 3, 2020
TP212.9
A
1000-3096(2020)11-0072-06
10.11759/hykx20200303002
2020-03-03;
2020-07-06
国家重点研发计划(2017YFC1403603);中国科学院科技网络服务计划(KFJ-STS-ZDTP-055)
[The National Key Research and DevelopmentProgram of China, No. 2017YFC1403603;Science and technology network service program of the Chinese Academy of Sciences, No. KFJ-STS-ZDTP-055]
姜静波(1979-),男,山东青岛人,副研究员,主要从事海洋环境监测仪器的研究,电话:0532-82898736,E-mail:jiangjingbo@ qdio.ac.cn;于非,通信作者, 研究员, 主要从事海洋调查与区域海洋学研究工作, 电话:0532-82898187, E-mail: yuf@qdio.ac.cn
(本文编辑: 康亦兼)