海床基传感器数据采集与远程控制单元设计
2020-02-04王思又郑衍宁郑坤
王思又 郑衍宁 郑坤


摘 要:目前传统海床基传感器存在数据采集自动化控制、多传感器状态监测、水下硬件维护困难等问题。为解决上述问题,提出一种海床基传感器数据采集与远程控制单元的设计方案,主要包括海洋观测数据的实时传输与处理、传感器远程控制及状态监测、数据实时可视化三个部分的功能。通过下水测试,验证了该方案对解决海床基多传感器自动化控制等问题的有效性。
关键词:海床基传感器;数据采集;远程控制;复合缆通信
中图分类号:P716 文献标志码:A 文章编号:2095-2945(2020)03-0080-04
Abstract: At present, there are some problems in traditional seabed-based sensors, such as automatic control of data acquisition, multi-sensor condition monitoring, difficulty in underwater hardware maintenance and so on. In order to solve the above problems, a design scheme of seabed-based sensor data acquisition and remote control unit is proposed, which mainly includes three functions: real-time transmission and processing of ocean observation data, sensor remote control and state monitoring, and real-time data visualization. Through the launching test, it is verified that the scheme is effective in solving the problems of seabed-based multi-sensor automatic control.
Keywords: seabed-based sensor; data acquisition; remote control; composite cable communication
海洋观测技术装备包括海洋观测平台装备及传感器设备,是海洋工作的必要支撑手段,在海洋强国建设进程中具有重要的战略地位[1]。海床基作为一种高可靠、低功耗、连续性觀测海洋水文、海洋生物、海底地质等要素的重要设施,是获取海洋表面及水下综合数据工作中不可或缺的技术手段[2,3]。
目前,国内自主研发的海床基观测系统,在技术上趋于成熟,但在应用中还存在一些问题,主要表现在传感器采集与控制单元上,其中包括数据采集及传输安全问题、传感器远程控制问题及传感器设备维护问题。为解决以上三个问题,本文结合现有技术和传感器实际观测应用场景进行分析,提出了一种海床基传感器数据采集与远程控制单元设计方法,为相关技术人员提供参考。
1 总体设计
1.1 工作原理
同海床基自动化监测系统一样,本设计中所提出的数据采集与远程控制单元(下文简称采集控制单元)是一种适用于海床基多传感器自动化工作与控制的装置,该装置主要包括两部分,即水下部分和水上部分[4,5]。
水下部分主要指的是水下数据采集与控制器,它与传感器安装在海床基搭载平台上,水上部分包括水上数据接收与控制器、电源管理控制器和数据可视化工控机,它们部署在近海岸固定观测平台上。海床基平台内传感器与采集控制单元水下部分通过串口通信,采集控制单元水下部分再通过海底光纤电源复合缆(下文简称复合缆)与水上部分进行相连,组成完整通讯链路,实现数据的采集与控制。其中,复合缆在满足采集控制单元水上水下设备通信要求的同时,对整个海床基中的硬件设施进行供电,在水上部分,复合缆分别与近海岸固定观测平台中的电源控制器和水上数据接收与控制器相连,其中电源控制器用来控制水下设备的电源切换,水上数据接收与控制器将数据进一步处理解析后将数据发送给可视化工控机,由可视化工控机对海洋观测数据进行最终的处理及可视化显示,可视化工控机提供控制水下传感器操作功能,将操作命令再通过数据接收链路发送给传感器设备。具体工作原理如图1所示。
1.2 硬件组成
海床基传感器数据采集与控制单元整体硬件组成及通信原理如图2所示,主要包括水上和水下两个部分。
1.2.1 水下部分
水下部分即水下数据采集与控制器,它由多传感器接口集成管理板卡、通信控制与数据处理板卡和光纤数据传输控制器组成。多传感器接口集成板卡主要是用于接入海床基所搭载的各海洋信息采集设备,便于接口统一管理。通信控制与数据处理板卡主要是用于承接多传感器接口集成板卡与光纤数据传输控制器两个硬件的通信,并对其进行管理,同时对于传感器传输上来的原始数据进行分类整理。光纤数据传输控制器主要用于保障水上水下的硬件进行正常的光纤通信。具体硬件组成如图3所示。
1.2.2 水上部分
水上部分包括水上数据接收与控制器、可视化工控机、电源管理控制器,其中水上数据接收与控制器由光纤数据传输控制器、通信控制与数据处理板卡组成。数据可视化工控机主要是用于对海床基传感器进行远程管理、数据采集、状态监测,以及数据可视化存储等。电源管理器主要是针对于海床基传感器的电源进行管理与控制,从而保障整个单元正常工作。具体组成如图4所示。
1.3 功能设计
1.3.1 数据采集与传输
海床基平台搭载了声学多普勒波浪剖面流速仪(ADCP)、声学多普勒点式流速仪(ADV)、温盐深仪(CTD)、水位计等多种物理海洋数据采集传感器设备。本设计中所采用的声学多普勒波浪剖面流速仪和声学多普勒点式流速仪的数据传输频率最快为1Hz,而温盐深仪的数据传输频率最快为1.8Hz,为了保证数据传输的稳定性,所以采用高频补码统一数据位的方式进行传输,即采用最快1Hz的传输频率,对于部分频率较低导致的传感器数据缺失采用补码的方式进行填充,保证数据传输的一致性。主要传感器参数指标如表1所示。
传感器有效数据大小为24字节,为保证海床基传感器搭载平台的可扩展性,数据传输设计大小为40字节。为了降低传输能耗和数据损失率,采用光纤进行传输,在此过程中,底层传输协议采用UDP协议。
1.3.2 多传感器参数配置
海床基安置过程较繁琐,通过频繁打捞设备进行最优参数调整对海上观测人员提出了考验。为降低劳动强度,简化传感器参数配置的工作流程,本文对传感器的参数配置功能进行了设计,以实现多传感器参数远程设置功能。
传感器配置主要包括采样频率、存储格式、工作时间,以及设备工作环境信息等。所有参数设置操作均在工控机上完成,然后通过光纤线路发送给水下通信控制与数据处理模块,由该模块将参数进一步解析,发送给各个传感器,实现用户对多传感器的参数设置。
1.3.3 数据实时可视化
海床基传感器在工作状态下,实时将数据发送给水下通信控制与数据处理模块,由该模块对数据进行实时处理,通过光纤线路发送给水上部分,最终由数据可视化工控机对数据进行处理及可视化显示。数据可视化工控机针对数据可视化主要包含以下三部分的内容:(1)传感器采集信息实时显示。工控机对接收到的数据流进行逐个字节实时解析,并对解析数据进行阈值验证,检核无误并进行实时显示,若有误,则进行错误统计显示。(2)历史数据动态显示。工控机终端对已接收的数据进行临时存储,将其通过动态曲线的形式显示。(3)传感器状态及辅助信息的实时显示。水下通信控制与数据处理模块将对传感器状态、工作环境信息,及传输链路的通信质量实时收集,该部分信息将实时显示在工控机软件;其中,传感器采集数据质量的显示,主要依据(1)中的错误统计。
2 关键技术
2.1 数据压缩与加密
数据压缩对象为监测状态数据、通信状态数据及部分采集数据,其中,监测状态数据包括传感器工作状态及外部环境数据。
字符数据采用数据字典方法进行压缩,敏感数据采用DES进行对称加、解密,而加密与解密的Key值采用MD5结合salt算法进行加密[6]。进而相同Key明文每次经过salt算法添加随机数后,加密生成Key的密文将完全不同,加大了暴力破解的难度,保障了数据的安全性[7]。
2.2 传感器状态监测与远程控制
传感器状态监测所依据的硬件包括两个部分,一是传感器本身所具有的硬件设备,主要是用于监测传感器自身工作状态;二是传感器外部的辅助设备,如监测酸碱度、温度等指标的传感器。通过对这两个部分信息进行采集整理,实现传感器状态检测的目的。
传感器远程控制依据第三方函数库(API),实现对传感器远程控制功能。整合多个传感器的各参数配置原理,实现传感器从单一到复杂功能的一键配置。状态监测与远程控制使得传感器高效配置,保障传感器可持续工作。
2.3 断电保护
在实际应用过程中,为了降低海上突发水文灾害对水下传感器及水上观测平台相关硬件的破坏,设计阈值警报功能。对观测数据进行预处理分析,结合水文环境灾害参考指标分析,给出异常工作信息,同时进行断电保护。
3 下水实验与结果分析
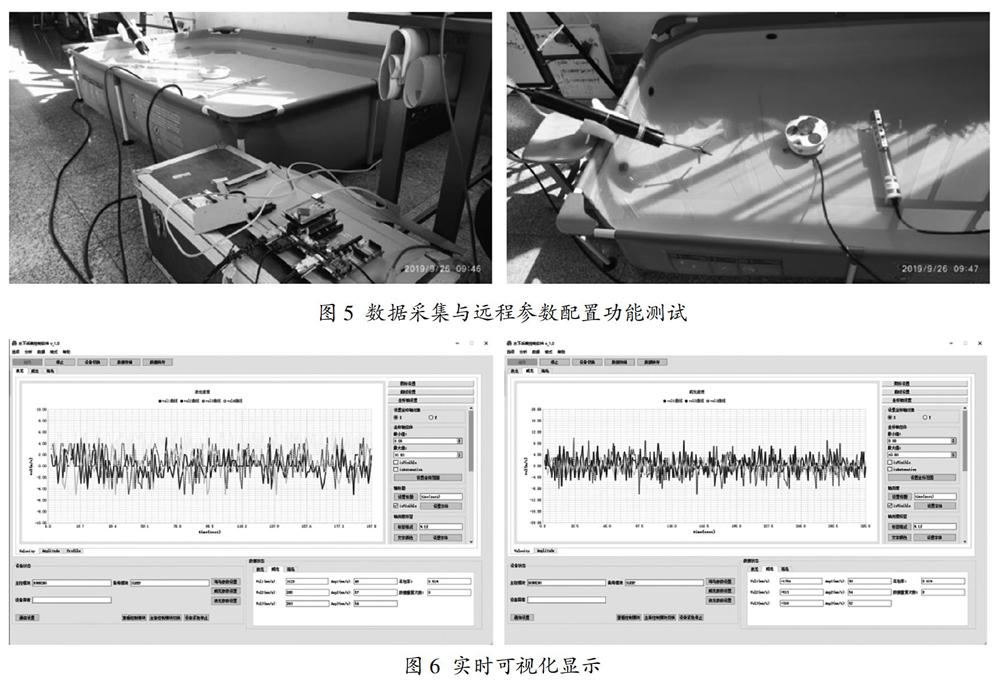
为验证本设计方案的有效及实用性,采用221cm×150cm×50cm的水池进行下水实验。其中,测试所采用的传感器为Nortek“浪龙”波浪剖面流速仪AWAC(ADCP)、Nortek“威龙”声学多普勒点式流速仪Vector(ADV),以及美国SEA-BIRD温盐深综合剖面测量仪(CTD)。通过搅动池水来模拟海上水面波浪及水流,使得传感器测得持续变化的参数测量值,具体下水测试情况如图5所示。
传感器分别通过串口线与采集控制单元的水下部分相连,水下部分再通过复合缆与采集控制单元的水上部分连接。通过实验测试,实验中所采集的数据可视化效果及传感器监测信息如图6所示。
对比传感器固有的随机软件与本设计中工控机可视化软件对相同原始数据的解析结果,得出数据解析正确率达99.75%。通过远程设置,更改传感器采样参数,经状态更新以后,可视化软件端状态(如图6)也随之进行自动化更新。
4 结束语
本文从实际应用出发,针对海床基传感器观测过程中仍存在的问题,提出了解决办法。设计中集成了多种传感器的数据采集与控制、串口与光纤线路通讯、数据分析与可视化表达等多方面的技术,实现对海床基传感器在海洋观测工作效率的提升。
参考文献:
[1]罗续业.论海洋观测技术装备在我国海洋强国建設中的战略地位[J].海洋开发与管理,2014,31(03):37-38.
[2]张毅,孙思萍,齐尔麦,等.海床基自动监测系统中央控制单元设计与实验[J].海洋技术,2007(04):1-3.
[3]李民,刘世萱,王波,等.海洋环境定点平台观测技术概述及发展态势分析[J].海洋技术学报,2015,34(03):36-42.
[4]齐尔麦,张毅,常延年.海床基海洋环境自动监测系统的研究[J].海洋技术,2011,30(02):84-87.
[5]孙思萍.海床基海洋环境自动监测系统[J].海洋技术,2000(04):1-7.
[6]张驰.基于DES和RSA混合加密的即时通信系统的设计与实现[D].厦门大学,2017.
[7]魏晓玲.MD5加密算法的研究及应用[J].信息技术,2010,34
(07):145-147+151.
