全自动泊车使用微波雷达和超声波雷达融合的技术
2020-02-03吴江淼
吴江淼
(同致电子科技(厦门)有限公司 福建省厦门市 361006)
当今泊车辅助技术(基于超声波和影像的融合)演变到一个更加有效和成本效益的自动泊车系统,将大大受益于加入毫米雷达传感器的融合。要领会从纯超声波的方案到融合毫米波雷达平台过渡过程中所涉及到的是什么,详看以下每种技术的基本原理介绍。
尽管有了毫米波雷达的技术融合,对于泊车的操作情景模式仍然是一样的,即寻找停车位和泊入停车。在寻找停车位模式下,车辆将启动搜寻模式并识别出合适的停车位。然后,在自动停入模式下,泊车系统将操纵车辆进入到指定的停车位。对于自动泊车的这两种模式,把超声波、毫米波雷达和影像一起融合可以提高障碍物目标识别的精度。为了满足自动泊车需求,需要泊车系统能够识别障碍物目标的距离、速度和角参数。所有的这些不同类型的传感器可以在泊车周围环境下发挥出各自的优势,形成互补。
1 超声波探头探测的基本原理
超声波探头在汽车领域里面被用于检测障碍物已有20 年。超声波使用是人类听力范围外的信号频率(>20kHz),并且通常使用的范围是40-70kHz。超声波在路径上向外发射,然后碰到物体时反射回来。通过知道信号波的传播时间和传播速度(声速)就可以计算出车辆相对障碍物(例如:汽车、路沿等)的距离。这种传感器成本低且灵活,在汽车的应用领域里面,比较适用于超短距测量。如图1 超声波探头的检测和主要部件的示意图。
当前超声波探头在汽车领域的应用有泊车辅助、引导和倒车告警。这些系统已经从简单地检测障碍物且障碍物距离车辆越来越近时,系统将向驾驶员发出越来越急促的“哔哔”告警声,到演变成驾驶员只要较少地参与车辆控制就能完成半自动泊车。典型的系统应用是在汽车保杆周围布置4-12 颗超声波探头,以提供车辆所需的检测覆盖范围。如图2,目前市场上车辆以超声波雷达为主的最大化12 颗探头的布置图。
通常障碍物检测的探头布置在前保杆或后保杆所需合适的位置,例如,在保杆上布置角探头各一个,中间探头两个,对于要覆盖整个车辆的探测范围,通常需要在车辆每侧增加传感器的布置(共12 颗传感器)。
2 超声波探头的局限和挑战
虽然超声波技术对于倒车泊车辅助是一种比较成熟的方案,但是对于支持自动泊车辅助的功能,使用超声波传感器,将会有一些局限和挑战。
随着超声波技术的成功,越来越多的汽车将使用这些传感器,传感器之间将会产生更多的信号,这些信号将会产生互相干扰,使得车辆在泊车过程中可能会造成其它的问题。并且如果两辆汽车越近时,相互之间将会产生同频干扰。幸运的是,这个问题在新一代超声波传感器可以通过发送信号编码来解决。不过超声波传感器与毫米波雷达相比的主要缺点是,前者在30cm-7m 的短距应用中效果最好。超出该距离的后,超声波的信号将会衰减,超出了接收传感器的检测范围能力。即使有这个探测范围的缺点,成熟的超声波系统已经变成的一种强制车辆配套的技术。到2019 年,全世界很多地方要求新汽车需要安装超声波探头系统用于障碍物检测。
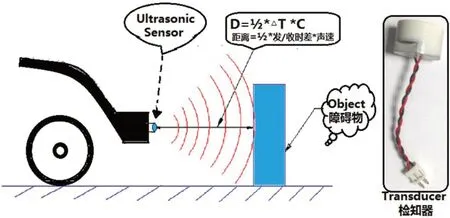
图1:超声波目标障碍物检测示意图和核心部件检知器

图2:12 颗超声波探头的布置示意图

图3:一个FMCW 雷达单发单收的简单方框示意图
3 毫米波雷达检测的基本原理
毫米波雷达的FMCW 技术将更多地出现在汽车领域的应用。毫米波的频带范围是30GHz-300GHz。毫米波传感器能检测出目标信息的距离、速度和角度。

图4:FFT 变换目标障碍物峰值频率对应的距离测量值
汽车上应用的频谱为24GHz 频带(预计2022 年前将被淘汰)和覆盖76-81GHz 的77GHz 频带。77GHz 频带通常地被分成两段:76GHz-77GHz 和77GHz-81GHz。注意到频宽(77GHz-81GHz 之间有4GHz)越高,距离分辨率就越高。此外,更高的频率对于速度的测量也会更加准确。
对于将来的自动驾驶的应用,77GHz 波段雷达可以提供短距(30m)和长距探测的两种模式。如前所述,基于毫米波雷达的系统可用来测量目标障碍物的距离、速度和角度。这项技术可以很容易地为汽车提供360°环视的感知能力,如下将探讨这三个关键参数是如何测量的。
4 目标障碍物的距离、相对速度和角度
从毫米波雷达传感器到目标障碍物的距离是由称为Chirp 发射的信号确定的。Chirp 通常是频率逐渐增加的正弦波。它是一种频率线性调制的连续波,即简称FMCW。本振生产一个线性调频(Chirp信号)被发送到发射(TX)天线,当 Chirp 信号遇到一个障碍物目标时,它将被反射回来,并被接收(RX)天线接收。RX 信号和原来发射(TX)的信号经过混频,产生了一个中频信号,该信号经过ADC 转换后成为数字信号。数字化数据通过DSP 的FFT 处理后,变换成目标距离对应的峰值频率(参考图3)。
FFT 处理将目标的峰值频率分解成实际测量的障碍物目标距离。这些峰值频率的相位对于目标距离的微小变化是很敏感的。例如,一个目标位置的微小变化,相当于1/4 波长(77GHz 约为1mm)的改变,转化后是一个180°的相位反转。相位信息构成了汽车和目标之间的速度评估的基础。如图4,毫米波雷达的测量。
解决障碍物的角度信息需要多个的接收天线,通过FFT 的计算处理得到所要的角度信息。对于自动泊车系统,距离、速度和角度测量是检测一个路沿和评估路沿高度的关键参数。但是仅仅从超声波传感器很难获得路沿高度的信息。毫米波雷达是解决这些需求的一种经济有效的方法。此外,毫米波雷达可以根据天线的实际,实现了比超声波雷达更广的视野(FOV)。例如,在寻找停车位模式时,毫米波雷达可探测40m 的距离。FOV 参数包含有水平和垂直测量,对于自动泊车的一个新要求是评估路沿的高度,这是必要的。
5 毫米波雷达的路沿与物体识别
毫米波雷达对于检测汽车到一个路沿或目标障碍物的最小距离是非常有用的。甚至可以将服务于泊车雷达功能的现有角雷达应用于盲点检测(BSD),从而减少系统级的传感器数量。最后,毫米波雷达信号受恶劣天气条件的影响较小。
当车辆驶入一个很紧凑的停车位时,判定车辆靠近路沿的距离是非常关键的。不幸的是,单个超声波探头由于自身物理特性检测的限制约15cm。超声波传感器和障碍物目标之间的最小可探测距离来自接收器必须等待的时间,然后才能准确地检测到反射信号,通常叫余振(RingTime)。在典型的超声波传感器中,信号发射和回波的接收都是通过同一个检知器。这就是为什么接收器必须等待发射器振动衰减到低于其阈值的原因,才能接收反射回来的信号。如果把超声波探头的发射器和接收器单独开来,且假设这两个距离足够远,不会引起串扰的情况下,是可以消除衰减的时间问题,但是这样就会导致成本增加一倍,所以大多数车辆使用的超声波探头都是发送和接收一体的传感器。自动泊车设计工程师可通过设计不用添加更多的超声波传感器,而是考虑使用毫米雷达传感器进行融合布置设计。
通过使用毫米波雷达的技术,除了能探测到3cm 外的路沿,这些雷达系统还能提供更好泊车性能和探测能力,如从雷达传感器获取目标障碍物的速度和角信息。
当车辆进入停车搜寻模式时,停车位上如果有地锁开启时,超声波难以识别出该障碍物的特性信息,从而造成错误的识别车位,这时驾驶员如果也未注意到该车位的环境时,车辆开启泊入模式时,车辆的后保杆将有可能会造成碰撞而损坏。但是如果使用毫米泊雷达时,毫米波雷达可以通过识别出目标障碍物的高度并进行特征分类,并把该车位地锁开启信息输出给自动泊车系统,系统将会判定该车位是无效的车位,进而继续进行搜寻模式,提高了寻找停车位的性能,对于车辆也起到更加安全保护的作用。
当然,超声波和毫米波雷达之间的性能和成本的权衡是不平衡的比较。毫米波雷达传感器提供了更好的分辨率、额外的参数测量并且只需要较少的传感器。成本上,比超声波传感器昂贵很多。另一个考虑的毫米波雷达是天线的成本。不过比较有优势的一面是,新的封装设计可以把天线集成在一片上(on-chip),这样毫米波雷达传感器的尺寸可以设计得更小。
环境因素也是毫米波雷达传感器比超声波传感器更有利的因素。汽车保险杆上常见的污垢和泥土都会影响到超声波传感器的检测,而对于毫米波雷达不影响。另外,毫米波雷达不需要像超声波传感器需要有非金属保险切口。
6 总结
毫米波雷达的传感器的优点包括实现车辆360°的覆盖范围,以及精确地测量目标障碍物的距离、速度和角度。这些优势可以使毫米波雷达弥补了自动泊车领域里面超声波和影像融合的不足之处。从2020 年开始,汽车OEMs 可利用现有的超声波传感器和摄像头并融合毫米波雷达的技术,将能在自动泊车、盲区检测、防撞处理上大大提高模块的性能。随着ADAS 市场需求越来越大,高精度感知成为新的技术亮点,毫米波雷达的应用融合也显得越来越重要。本研究适用于高端自动泊车雷达产品开发与应用,希望通过本研究,未来有更多的毫米波雷达融合产品面世,服务于人类,给用户带来更人性化的体验感。
