基于模糊PID理论的对超空泡水雷入水轨迹的控制
2020-02-03张丙辛贾欣蕊
张丙辛 贾欣蕊
(哈尔滨工程大学 黑龙江省哈尔滨市 150001)
1 动力学建模
1.1 坐标系定义
为了推导弹体入水时刻的动力学方程,需要首先对坐标系进行定义,本文中共定义两个坐标系,如图1所示,OgXgZg 为全局坐标系,原点位于水平面上,X 轴与水平面平行,Z 轴指向上方,ObXbZb 为弹体局部坐标系,原点位于弹体的质心位置,X 轴指向弹体前方,Z 轴与X 轴垂直。
设弹体在全局坐标系下的位置坐标为X 和Z,弹体X 轴与全局坐标系X 轴的夹角定义为俯仰角,用符号α 表示,并且规定图1所示的俯仰角为负。
1.2 受力分析
本文中分析的弹体不包含尾舵,在弹体入水过程中,将其受力简化为三种,分别是质心位置的重力、头部空化器受力、尾拍受力,如图2所示。
1.2.1 重力
弹体重力的作用点位于其质心处,方向与全局坐标系的Z 轴重合,重力的大小等于弹体质量乘以重力加速度,图3 中,重力被分解到弹体局部坐标系上,形成沿X 轴和Z 轴的两个分量,如公式(1)所示,其中Gx 和Gz 分别为重力分量,α 为弹体的俯仰角。

1.2.2 空化器受力
空化器位于弹体头部,为弹体在水下航行过程中空泡产生的诱导器,同时作为执行机构,可以通过偏转一定角度来改变弹体升力,借此达到一定的控制目的。设空化器与弹体的转角为δ,则弹体头部的空化器受力如图4所示,将该力的合力表示为Fc,将其分解到弹体局部坐标系上,形成沿X 轴和Z 轴的两个分量,即FD和FL。
空化器受力可以表示为公式(2):
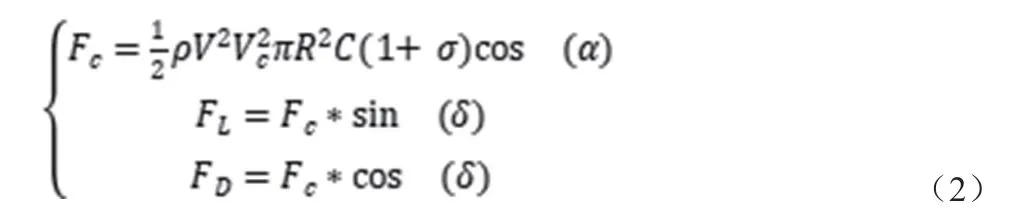
式中,R 和C 使空化器的阻力系数,σ 为空化器空化数,Vc为空化器位置的速度。
1.2.3 尾拍受力

图1:坐标系示意图
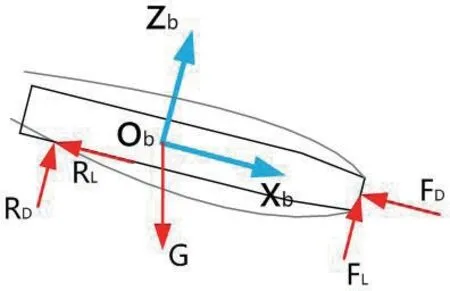
图2:弹体受力示意图

图3:弹体重力的分解

图4:空化器受力示意图
当超泡弹高速运动时,由于扰动很小,其尾部将与气泡壁连续撞击。本文将这种效果称为尾拍,弹丸尾拍上的力如图5所示。

图5:尾拍受力示意图
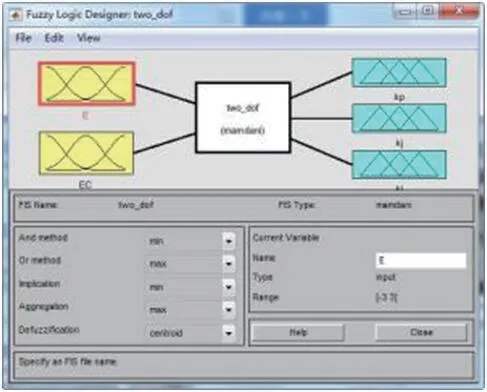
图6:模糊控制器

图7:E、EC 隶属度函数图
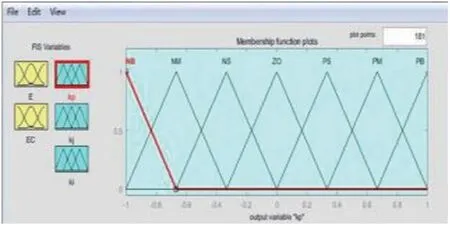
图8:隶属度函数图
尾拍受力可以表示为公式3:

式中,L 为弹体长度;D 为弹体尾部直径;Rct为弹体尾部空泡半径;λ 为经验系数,取0.5;V 为弹体速度。
1.3 动力学模型
基于弹体的受力分析,可以得到弹体入水过程的动力学方程为:

式中,xc为空化器到质心的距离;m 为弹体质量;J 为弹体转动惯量;g 为重力加速度;ω 为弹体俯仰角速度;
2 轨迹控制
2.1 模糊控制
模糊控制是一种基于语言的智能控制,模糊化的第一步是实现由输入输出变量的基本论域到模糊论域的转化,例如,e 的变化范围为[-x,x],则该区间就是e 的基本论域,ec 的变化范围为[-y,y],则该区间就是ec 的基本论域,u 的变化范围为[-z,z],则该区间就是u 的基本论域。模糊论域则是一组离散点的集合,例如可以将e 的模糊论域定义为将ec的模糊论域定义为将u 的论域定义为。
用E、EC、U 表示各变量对应的模糊论域,则可以通过量化因子ke、kec 实现输入变量的模糊化,通过比例因子ku 来实现由输出变量的转化,如下所示:
式中,eH和eL为输入变量e 的最大值和最小值,ecH和ecL为输入变量ec 的最大值和最小值,uH和uL为输出变量的最大值和最小值,<>表示取整运算。
2.2 模糊处理
通常在语言变量领域,将其划分为有限的文件。例如,E、EC和U 可分为{“正大(PB)”、“中央(PM)”、“正小(PS)”、“零(ZO)”、“负(NS)”、“负(NM)”、“负(NB)”}7。更多的文件,规则是灵活的,规则是详细的,但许多规则,复杂的规则,困难的编程,更多的内存;低等级,较少的规则,易于实现,但太少的规则会使控制更厚,无法达到预期的效果。模糊处理的过程,是定义隶属度函数以确定每个模糊语言值对各个档级的归属程度,常用的隶属函数有三角型,阶梯型等。

图9:的输出曲面

图10:弹体入水控制器设计
图11:弹体入水轨迹控制模型
图12:弹体轨迹控制结果

图13:空化器转角
2.3 模糊推理及反模糊化
模糊逻辑推理是一种基于模糊逻辑的不确定性推理方法,是在二元逻辑三段论的基础上发展起来的。虽然它的数学基础不如形式逻辑严格,但这种推理方法得到的结论与人类思维推理的结论是一致的或相似的,并在实际应用中得到了验证。输出变量的清晰化就是把输出的模糊变量重新转化为精确量的过程,因为模糊输出量是无法对被控对象进行调节的,在模糊控制器中,一个输出变量有多个模糊子集,因此需要选择其中一个作为输出变量。
3 弹体入水模糊PID控制
常规PID 控制不具备自适应控制能力,时变和非线性系统的控制效果不佳。当系统参数发生变化时,控制性能会发生较大变化,控制特性可能变差,严重时,系统可能不稳定。模糊自适应PID不仅保持了传统PID 控制系统原理简单、使用方便、鲁棒性强的优点,而且具有较好的灵活性和控制精度。
自适应模糊PID 控制器在模糊推理的帮助下,具有控制器参数自动整定的最大优点。根据PID 控制参数pK、iK、dK 对控制系统输出特性的影响,确定了参数比例系数Kp、微分时间常数Kd、积分时间常数的整定原则。
本文采用模糊PID 对弹体进行控制,模糊控制器输入变量为理想轨迹的Z 值与弹体实际Z 值的误差以及该误差的变化率EC,输出变量为PID 的各参数kp,dki,dkd,利用Matlab 中的fuzzy logical designer 对上述输出输入变量进行模糊化,建立模糊控制器如图6。
输入变量论域为[-3,3],采用高斯函数,输出变量论域为[-1,1],采用三角函数,它们的隶属函数图如图7、图8所示:
模糊控制规则由7 条语言构成,限于篇幅不再赘述。图9 显示了在这些控制规则下的输出曲面图。
依据上述建模原理,本文建立的控制器如图10所示,其中Fuzzy 为模糊控制模块。输出为PID 控制对应三个参数的修正量,PID 控制的基本参数设置为1、0.1、0.001。
4 仿真结果
本文将弹体动力学模型、模糊PID 控制器相结合,建立了完整的弹体入水轨迹控制系统,模型结构及各部分的作用如图11所示。
弹体轨迹及空化器转角的仿真结果如图12 至13所示,可以看出,在控制器的作用下,空化器产生了相应的转角,进而产生了使弹体航向发生改变的作用力,与无控制的模型相比,其轨迹更加接近目标轨迹。
