基于H∞扩展卡尔曼滤波器模型不确定性的动态状态估计
2020-02-02范俊
范 俊
(国网湖北省电力有限公司 荆州供电公司检修分公司,湖北 荆州 434000)
0 引 言
电力系统动态状态变量的准确估计对于监视和控制至关重要。迄今为止,已经提出了各种基于扩展卡尔曼滤波(Extended Kalman Filter,EKF)和无迹卡尔曼滤波(Unscented Kalman Filter,UKF)的动态状态估计器(Dynamic State Estimator,DSE)[1-6]。然而,卡尔曼型滤波器需要在某些特定条件下才能很好地工作[7]。首先需要知道每个时刻系统过程噪声和观测噪声的均值和相关性,其次应该知道系统的过程噪声和观测噪声的协方差,最后系统的离散时间非线性状态空间模型要是准确的。但是,由于实际的电力系统难以获得系统过程噪声和观测噪声的统计信息,因此假设可能不成立,此外系统模型的某些参数或输入可能是未知的,状态估计结果会大大恶化。
尽管H∞滤波器已广泛应用于控制和信号处理中,但在实现动态状态估计器时,尚未将其应用到电力系统模型不确定性中。本文提出了一种基于鲁棒控制理论的H∞扩展卡尔曼滤波器来约束系统不确定性的影响以及调整HEKF参数的方法,并基于IEEE-39节点标准系统的仿真结果证明了HEKF的有效性。
1 H∞扩展卡尔曼滤波方法
1.1 问题描述
对于电力系统,其离散时间状态空间表达式可以表示为:

式中,xk是状态矢量,其中包括同步发电机、励磁机以及调速器的状态变量;zk是包含电压相量、电流相量以及无功功率的测量向量;ωk和vk是系统过程噪声和观察噪声,并假设它们是零均值和协方差矩阵为Qk和Rk的正态分布;uk是系统输入向量;f(·)为预测向量函数;h(·)为量测函数。
为了估计xk,可以使用EKF和UKF,假设过程噪声和观察噪声的协方差矩阵Qk和Rk是已知的,系统的输入uk和发电机参数准确且已知,则EKF和UKF可以良好工作,然而由于发电机参数存在不确定性,因此这些假设很难成立。例如,由于铁磁饱和的影响,瞬变电抗在不同的运行条件下会发生变化,同时过程噪声和观察噪声的统计数据也难以获得,并且系统输入可能未知,此外系统的非线性可能无法建模,在这些系统不确定性的情况下,EKF和UKF可能会产生明显偏差的估计结果。
1.2 H∞扩展卡尔曼滤波器
为保证估计误差的上限是有限的,并同时最小化该上限,给定直到(包括)时间N-1的测量值、初始状态以及噪声统计信息,设计一个满足以下条件的滤波器:

式中,x0和x^0|0分别是真实的初始状态向量及其估计值;xk和x^k|k分别表示真实状态向量及其估计向量值;P0|0和Pk|k分别是初始协方差矩阵和估计协方差矩阵;γ是限制系统不确定性的正标量参数。
使用式(3)并参考文献[8]中的工作,可以通过以下两个步骤来表示HEKF。
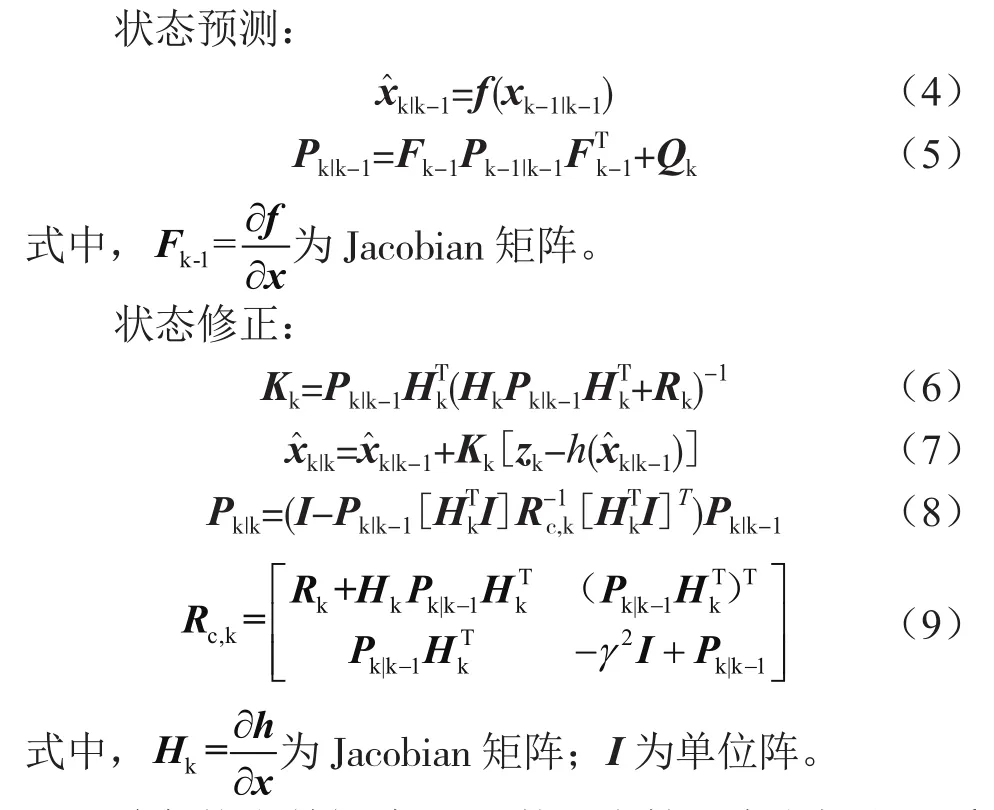
确保协方差矩阵Pk|k-1的正定性,本文提出以系统的方式调整参数γ,具体而言,通过将矩阵求逆引理应用于公式(8),可得到:

由式(10)可知,由于Pk|k是正定的,这就意味着式(10)等式右边的项大于或等于0,因此参数γ需满足:

式中,eig表示求矩阵的特征值。
将参数γ调为最优的方法是:

式中,λ是大于1的正常数,当λ趋于无穷大时,HEKF变为标准EKF,因此可以将λ视为在H无限性能和最小方差性能之间进行权衡的调整参数。通过大量仿真可以发现,只要选择的λ不是很大,那么HEKF始终会获得良好的性能。在电力系统DSE中,λ的建议值在1~10变化。
2 算例仿真与分析
基于图1所示的IEEE-39节点标准系统评估本文所提基于H∞扩展卡尔曼滤波器的模型不确定性动态状态估计方法,以验证所提出的HEKF用于估计系统动态状态变量的性能[9]。具有IEEE DC1A激励的TGOV1涡轮调速器用于每个发电机的9阶两轴模型,每台发电机状态变量数的总和为90个。Att=0.5 s,将连接节点15到节点16的传输线关闭以模拟系统干扰。时域仿真结果取真实值,测量矢量包含所有发电机终端的注入有功功率和无功功率,以及电压幅值和角度。
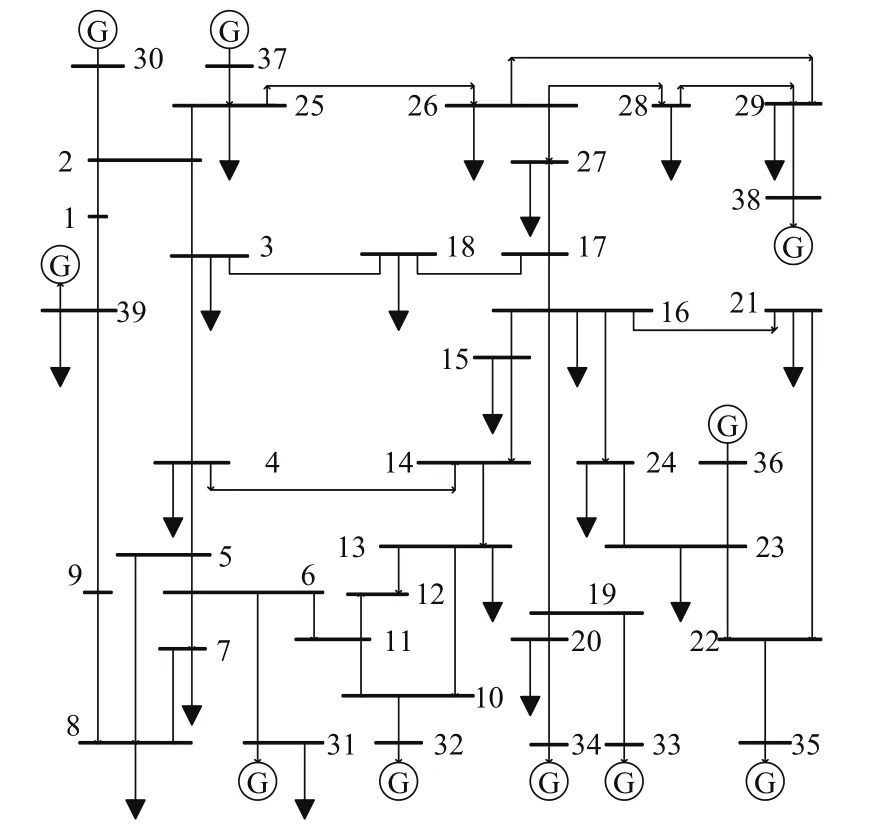
图1 IEEE-39节点标准系统结构图
PMU采样速率为每秒50个样本,假设系统过程噪声和观测噪声均具有零均值和方差等于10-6的随机高斯噪声,λ设置为2。将误差为5%的预扰动稳态值用作初始状态,考虑以下两种情况,并使用估计状态变量的均方根误差进行说明。
情况1,由于系统运行条件的变化,发电机的瞬态电抗发生变化,不确定性被认为是15%~20%[5]。情况2,系统过程和测量噪声未知,它们的方差设置为10-4,而真实值为10-6。为正确合理评估HEKF算法,使用均方根误差(Root Mean Square Error,RMSE)作为估计性能的评价指标。在k时刻,第k断面的RMSE计算公式如下:
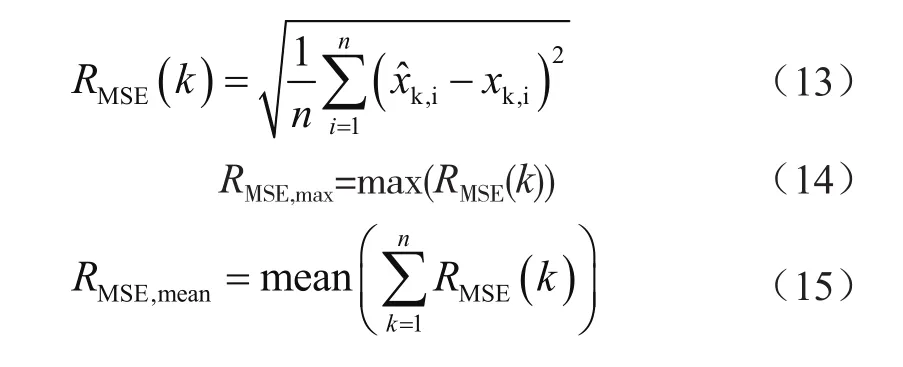
式中,表示k时刻估计值的第i个分量;xk,i表示k时刻真实值的第i个分量;n表示状态量个数;RMSE(k)、RMSE,max和RMSE,mean分别表示第k断面的均方根误差、系统最大均方根误差以及系统平均均方根误差;max表示取最大值;mean表示取均值。
对以上两种仿真情况分别使用EKF、UKF以及本文所提HEKF算法进行仿真,仿真结果如表1和表2所示。

表1 IEEE-39节点标准系统情况1时均方根误差结果

表2 IEEE-39节点标准系统情况2时均方根误差结果
由表1和表2的仿真结果可知,在情况1时EKF算法的电压的RMSE,max和RMSE,mean分别为0.007 3和0.003 5,相角的RMSE,max和RMSE,mean分别为0.030 9和0.009 7,均为最大。UKF算法的电压的RMSE,max和RMSE,mean分别为0.004 1和0.002 7,相角的RMSE,max和RMSE,mean分别为0.010 7和0.005 8,均小于EKF算法,而大于HEKF算法。HEKF算法的电压的RMSE,max和RMSE,mean分别为0.005 1和0.000 9,相角的RMSE,max和RMSE,mean分别为0.0087和0.002 6,均为最小。在情况2时EKF算法的电压的RMSE,max和RMSE,mean分别为0.007 5和0.003 8,相角的RMSE,max和RMSE,mean分别为0.029 6和0.006 8,也均为最大。UKF算法的电压的RMSE,max和RMSE,mean分别为0.004 7和0.002 9,相角的RMSE,max和RMSE,mean分别为0.015 7和0.004 7,也均小于EKF算法,而大于HEKF算法。HEKF算法的电压的RMSE,max和RMSE,mean分别为0.002 3和0.001 9,相角的RMSE,max和RMSE,mean分别为0.008 9和0.001 5,也均为最小。可以看出,无论是在情况1还是在情况2,无论是对于电压还是对于相角,本文所提HEKF算法指标均最小,结果最好。
3 结 论
由于电力系统动力学模型会受到各种不确定性的影响,如在不同运行条件下变化的发电机瞬态电抗、不确定的输入以及噪声统计数据等,因此卡尔曼型滤波器的性能会大大降低。为限制这些参数不确定性的影响,本文提出了一种基于鲁棒控制理论的H∞扩展卡尔曼滤波器以及调整HEKF参数的方法。该方法能够有效利用调优参数实现对各种不确定性参数的滤波处理。此外,基于IEEE-39节点标准系统对本文所提HEKF算法进行仿真分析,仿真结果表明,所提方法能够有效限制系统参数不确定性的影响,得到最优估计结果。