基于PD的四旋翼飞行器悬停控制系统研究
2020-02-02赵连娟
赵连娟
(陕西国防工业职业技术学院人工智能学院 陕西省西安市 710300)
四旋翼飞行器是目前应用较多的小型无无人机,其结构简单,单价较低,往往是无人机爱好者入门级选择,但是由于质量小、体积相对较大,很容易受到气象状况的影响,尤其是在调节中由于控制系统控制方法选取不当,控制器参数选择不够科学,四旋翼飞行器在空中飞行悬停过程中出现连续抖动的状况,很影响使用体验。
1 四旋翼飞行器悬停控制系统应用现状
四旋翼无人机是一种能够垂直起降的非共轴的多旋翼飞行器,位于对角线上的一组旋翼逆时针旋转,另一对角线上的旋翼则采用顺时针旋转,相互抵消了旋翼旋转所带来的反扭矩力,通过改变对称分布的四个旋翼的转速,就可以改变无人机的位置。对于一个无人机来说,都存在六个活动自由度,即沿三个坐标轴的平移和旋转运动,但是对于四旋翼飞行器来说,只有四个自由度(因为只有四个电机),所以它是欠驱动系统,控制起来相对于六旋翼飞行器来说会困难一些。现阶段我国四旋翼飞行器在悬停控制过程中通常使用三个坐标方向的陀螺仪和三个加速度传感器来实现位置反馈检测控制。使用的控制算法也主要以简单的比例为主,所以常常出现在三个方向上彼此干扰,引起四旋翼飞行器在悬停时抖动严重的情况。
2 四旋翼飞行器空气动力学模型的建立
四旋翼飞行器的空气动力学模型为典型的多输入多输出系统,带有强耦合的欠驱动系统,根据拉格朗日动力学方程,建立质量动力场的参数方程,其数学模型可表示为:


图1:四旋翼飞行器
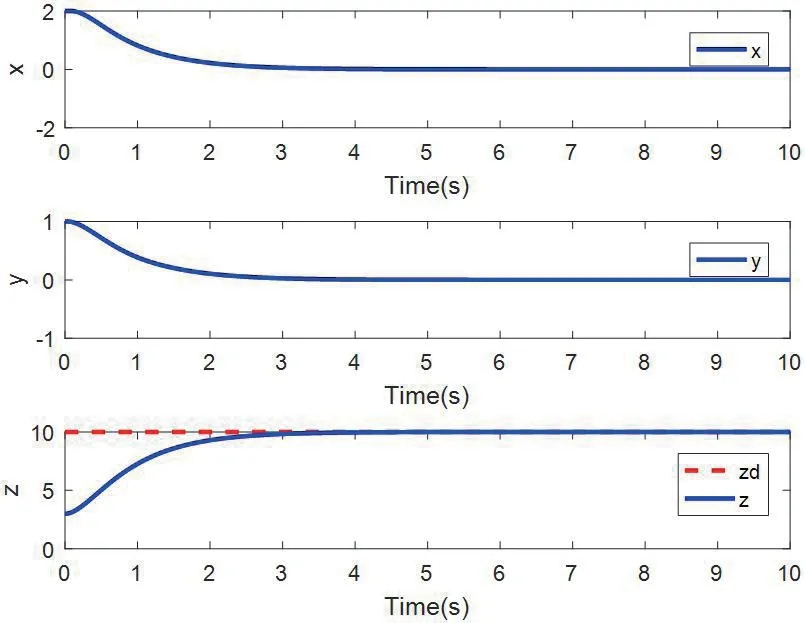
图2:x、y、z 三个轴方向位置变化
3 位置控制规律的设计
从式(1)可见,四旋翼飞行器的数学模型最高求导阶次是二次是一个二阶控制系统,在设计过程中,针对于二阶系统使用了Hurwitz 判据,由Hurwitz 判据可知对于特征方程为的系统稳定条件是:

定义位置控制规律ul来实现控制目标

则描述位置的模型可写成:

在工业控制中常常使用PID 控制器,其特点是采用偏差控制,针对于采样时刻的偏差值来计算实时控制量,其中的比例调节器主要是在信号变换时,改变信号的幅值,以减少偏差;积分调节器的作用是提高系统精度,但是会使系统震荡幅度变大,反应速度变慢;而微分调节器主要功能是反应偏差信号变化趋势,在系统中引入早期修正信号,加快系统运行速度,加快系统调节时间。针对于本系统,调节过程主要是快速反应,作为系统局部参数调节使用,故选用PD 调节器。
首先,针对于x 轴位置子系统,采用补偿PD 控制方法设计控制规律为:
同样,针对于y 轴位置子系统,采用补偿PD 控制方法设计控制规律为:
同样的道理,针对于z 轴位置子系统,基于前馈和重力补偿的PD 控制方法设计控制规律为:
对于本控制系统,只要将比例控制系数和微分控制系数都取正实数,就能保证三个坐标轴控制子系统都为稳定系统。
4 MATLAB仿真
针对于四旋翼飞行器控制系统,其数学模型为多输入多输出系统,也需要进行解耦数学处理,针对系统特点,选用MATLAB 软件为系统建模软件。针对于式1,取m=2,l=0.2,g=9.8,K1=K2=K3=0.01,K4=K5=K6=0.012,I1=1.25,I2=1.25,I3=2.5 扰动量d4=d5=d6=0.1,被控对象的初始状态取[2,0,1,0,0,0],被控对象姿势控制角度三个值都取零初始。将三个轴的比例控制系数和微分控制系数都取5.0。则仿真结果如图2所示。
从仿真结果可见,在控制过程中,由于系统动力学方程经过了解耦工作,简化了计算机计算时间,并在控制器上选用了PD控制器,加快了系统反应速度。在x 轴、y 轴、z 轴三个轴的位置调节过程中,能在很快时间内达到控制要求,与简单的控制方法比较,提高了反应速度,减少了三个轴方向上的超调量以及抖动。
5 结束语
在本文中,首先利用拉格朗日动力学定理对于四旋翼飞行器的空气动力学模型进行数学建模,再利用现代控制论的基本方法针对于四旋翼飞行器的数学模型进行解耦计算,以降低在计算机计算过程中的计算量,同时也能有效地避免控制参数相互影响,令每个参数在控制过程中独立控制,避免出现大的超调量,以免在悬停控制时引起抖动,悬停不稳现象,引入PD 调节,在比例控制微分控制参数作用下能够快速反应,提高四旋翼飞行器稳定悬停速度。
在四旋翼飞行器的控制过程中,由于是欠驱动控制系统,只有四个输入量,而输出量有六个以上,所以没有能够对飞行器的飞行姿势进行有效控制,在后续研究中可以利用矢量控制分析方法,将四个输入量进行二次数据处理分解成六个变量,把欠驱动控制系统转换成一般控制系统,再引入飞行姿势控制,实现更加快速稳定的控制。
