公路综合检测车在公路工程检测中的应用研究
2020-01-18蒋学智
文/蒋学智
1 前言
传统的公路检测方式需要人工操作,从而导致效率以及准确率较低。公路综合检测车的推广应用,不仅可以提高检测准确度,准确无误地传达检测结果,同时还可以提高检测效率。公路综合检测车可对检测公路的车辙数据、平整指数、路面损害程度等信息进行收集整理,同时清晰展示出来。因此,随着公路养护工作量的快速增加,选用公路综合检测车进行公路检测,显然具有必要性。
2 公路综合检测车系统组成及其优势
公路综合检测车主要由裂缝探测系统、定标系统、定位定向系统、录像系统、路面车辙检测系统、安全隐患检测系统、构造深度检测系统等多个部分组成,各自系统发挥着重要作用。
公路综合检测车与传统人工检测相比,其无论在检测效率还是检测精度等方面都有显著优势。
2.1 检测项目
公路综合检测车可直接通过车上已安装设备进行测量和拍照,从而可以对路面平整度、路面构造深度、路面损坏情况等进行检测,对检测数据进行处理分析、存储。因此检测结束后,可人工对检测数据进行查阅、核对[1]。
2.2 检测效率
公路综合检测车具有高效的检测效率,其通过打开车载检测设备即可实现上路检测,车在行驶过程即是检测过程,车辆行驶速度最高可达84km/h。
2.3 检测精度
公路综合检测车的检测精度不低于人工检测精度,因此相当于节省了检测成本。为获取相关的检测数据和资料,公路综合检测车对被检测路段进行图形图像识别,属于无损检测方式,对路面性能没有损伤[2]。
2.4 检测安全性
公路综合检测车是通过车辆行驶过程中进行检测,避免了人工检测需要封闭交通的弊端,使得发生交通事故的概率大大降低,同时还可保障了检测过程中可通车的优势。
3 公路综合检测车应用
3.1 路面裂缝检测
公路综合检测车对于路面损坏检测子系统是采用三维相机和红外线激光,激光传感器的横向点间距为1mm,行进方向的相邻横断面间距为5mm,高程分辨率0.3mm。其检测原理是基于激光三角测距原理,从而读取出公路横断面相关数据,由于三维相机的介入,使得高精度的三维检测试验数据较容易获取,再结合路面图形图像数据,可以把被检测路段上的裂缝、车辙、沉陷、边角剥落等所有存在的病害都识别出来[3]。
3.2 路面平整度检测
公路综合检测车对于路面平整度检测原理是在两后车轮前方安装2 个激光测距器和2 个加速度计,通过利用激光测距机测量设备与路面间的相对距离,从而得到公路纵断面的相对高程,最后输出国际平整度指数(见图1)。
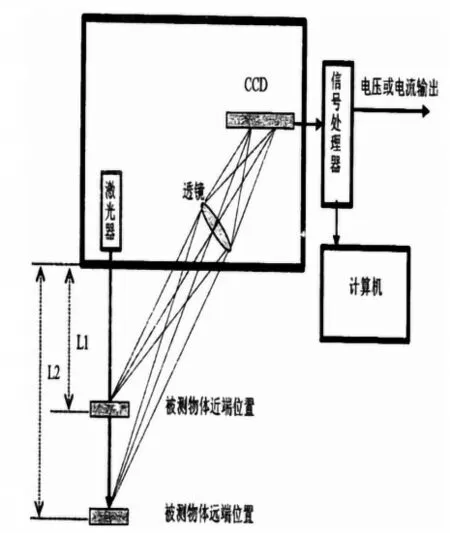
图1 平整度检测系统原理
3.3 路面车辙检测
公路综合检测车对路面车辙检测原理是利用车上安装的红外激光发射器和2 台CCD 相机对公路变形采取检测,此检测需在同步控制器触发控制下进行。然后利用相机拍摄的线激光在路面上的形变情况,再进行分析,结合分析结果从而得出公路车辙深度等数据。
为了验证公路综合检测车对路面车辙检测效果,选取试验路段,分别采用人工测量和公路综合检测车两种方法,进行车辙检测试验。检测数据结果如表1 所示。从试验路段的检测数据可表明,公路综合检测车所测量的车辙数据与人工测量数据较为接近,误差均在3mm以内,从而验证了公路综合检测车对于检测公路车辙可行性[4]。
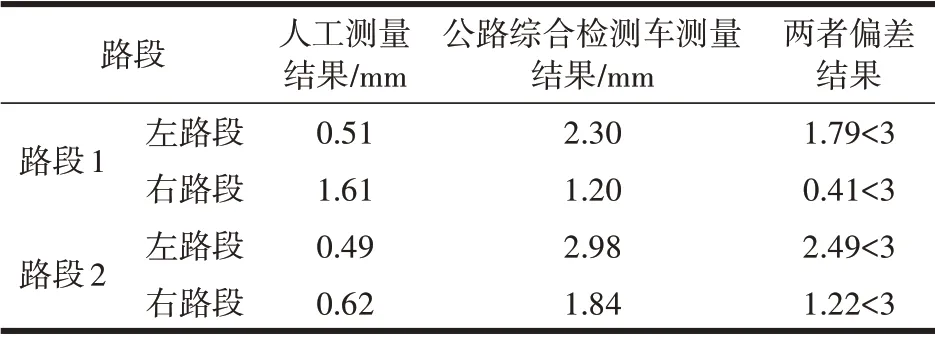
表1 车辙试验检测结果对比
3.4 工程案例应用效果
3.4.1 项目概况
从上述分析表明,公路综合检测车对于检测路面裂缝、路面平整度以及路面车辙等方面具有可靠性。为了进一步验证其应用效果,下面结合实际工程项目进行相关检测。
西北区域某高速公路全长约100km,公路设计为双向四车道,路面设计宽度为24m,公路设计时速为100km/h,路面设计荷载为汽车-超20,挂-120。公路地处西北戈壁沙漠干旱区,首次对该公路相关指标采取检测。在这个工程测量实例中,采用公路综合检测车对不同路段的平整度、构造深度和车辙进行测试。
对该公路采取平整度检测、路面车辙和构造深度检测路段分别选取长度为200m 和300m 路段。同时为了提高检测准确率,对上述每个路段,分别按照25km/h,45km/h,70km/h 的时速分别进行4 次试验检测。
3.4.2 构造深度检测
构造深度的检测原理和车辙检测相似,利用检测车内部设备先在高照度下采集公路图像,继而通过智能识别系统确定公路构造深度。两个试验路段中,公路综合检测车和人工测量数据如表2 所示。从表2 检测结果表明,公路综合检测车测量出的公路构造深度与人工测量数据相差较小,远小于1mm。
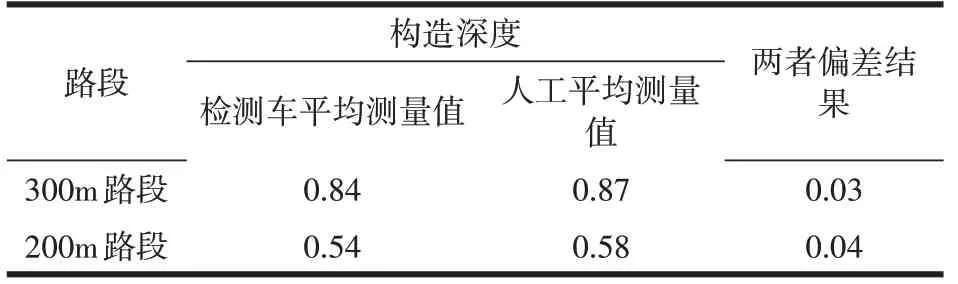
表2 公路构造深度检测结果(单位:mm)
3.4.3 平整度检测
公路综合检测车通过利用设置在车轮上的加速度和激光测距器来实现公路平整度检测,通过测量车辆轮迹带出的平整度,然后利用相关计算方法计算输出国际平整度指数IRI,系统同时计算出偏差。试验段的公路平整度检测结果如表3 所示。从表3 检测结果表明,公路综合检测车与人工检测对比,其平整度检测结果相差不大,偏差平均值均在3%以内[5]。
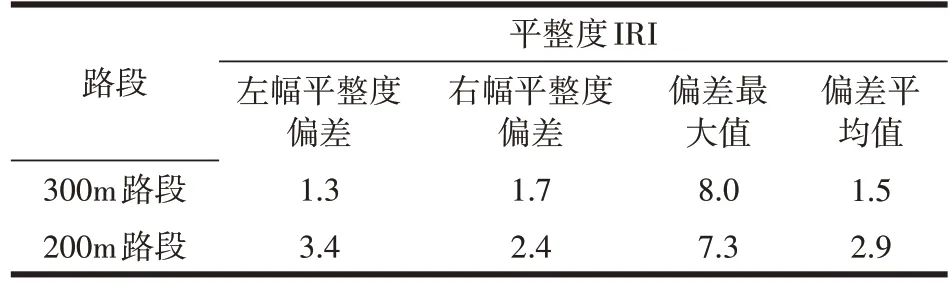
表3 公路平整度检测结果(单位:%)
3.4.4 车辙检测
公路综合检测车对路面车辙检测是利用车上安装的红外激光发射器和2 台CCD 相机检测路面变形情况,借助红外激光发射器发出的激光识别路面变形点,并加以分析,自动计算路面车辙深度。两个试验路段的车辙深度检测结果列于表4。从表4 检测结果表明,公路综合检测车与人工检测对比,其车辙深度检测结果相差不大,偏差平均值均在3mm 以内。
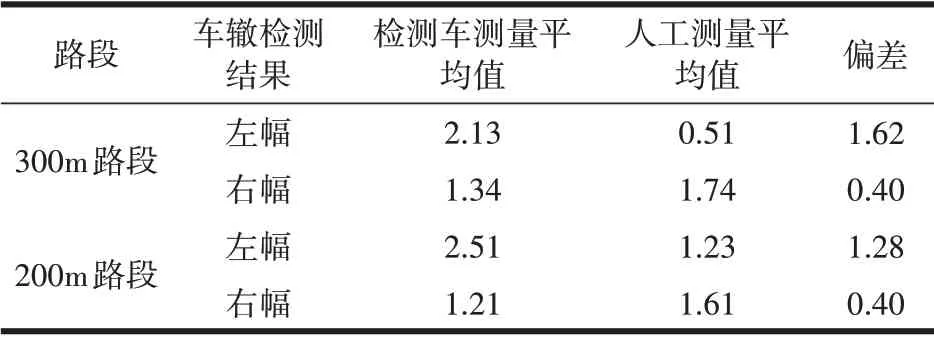
表4 公路车辙深度检测结果(单位:mm)
4 结语
随着公路检测工程量的快速增加,单纯采取人工进行公路检测逐渐不能适应公路快速发展的要求,而公路综合检测车在公路检测中的应用,在保证公路检测结果满足精度要求的前提下,可以大大提高公路检测效率,也节约了大量的人工。本文主要阐述了公路综合检测车在路面典型病害检测中的工作原理,同时结合工程案例分析其应用效果。从工程实例应用效果得到以下结论:公路综合检测车在路面裂缝、路面平整度以及路面车辙方面的检测结果表明,其与人工检测结果相差较小,而且偏差均在允许范围内。通过试验段检测结果,表明公路综合检测车的检测精度能够满足现行标准规范的要求,可以广泛应用于公路检测过程中。公路综合检测车与人工检测相比,检测效率得到有效提高,而且避免人工检测中可能出现的安全风险。
