基于深度学习检测器的多角度人脸关键点检测
2020-01-17赵兴文杭丽君宫恩来丁明旭
赵兴文,杭丽君,宫恩来,叶 锋,丁明旭
基于深度学习检测器的多角度人脸关键点检测
赵兴文,杭丽君*,宫恩来,叶 锋,丁明旭
杭州电子科技大学自动化学院,浙江 杭州 310018
针对人脸关键点检测(人脸对齐)在应用场景下的速度和精度需求,首先在SSD基础之上融合更多分布均匀的特征层,对人脸框坐标进行级联预测,形成对于多尺度人脸信息均具有更加鲁棒响应的深度学习检测器MR-SSD。其次在局部二值特征LBF的级联形状回归方法基础上,提出了基于面部像素差值的多角度初始化算法。采用端正人脸正负90°倾斜范围内的五组特征点形状进行初始化,求取每组回归后形状的眼部特征点像素均方差值并以最大者对应方案作为最终回归形状,从而实现对多角度倾斜人脸优异的拟合效果。本文所提出的最优架构可以实时获得极具鲁棒性的人脸框坐标并且可实现对于多角度倾斜人脸的关键点检测。
深度学习;机器学习;人脸关键点检测;人脸对齐;像素差值
1 引 言
深度学习技术的引进和机器学习技术的成熟使得计算机视觉相关任务取得巨大进展,从而促进了众多检测以及定位领域的应用技术趋于完善。人脸关键点检测,即人脸对齐,在这众多应用领域中与目标检测、回归定位息息相关[1]。作为人脸检测任务的延伸和拓展,同时又作为人脸校准和人脸识别任务的基础,关键点检测具有举足轻重的意义。除去人脸识别范畴的探究,人脸对齐技术在多个领域皆有建树。如在表情识别中,人脸对齐为情绪识别的研究提供了可能性[2]。又如具备美化图片功能的应用,包括人脸磨皮美化功能、动态变脸特效等等,需要以人脸对齐技术得到面部特征点或者特征区域从而进行相关操作,这就要求人脸对齐技术能够快速且精准地实现特征点定位[3]。
人脸对齐算法实现方案众多,设计思路由人脸检测架构与人脸对齐技术两部分组合而成。目前人脸检测的主流实现方案集中在深度学习领域中,如two stage网络的经典架构RCNN[4],Fast R-CNN[5],Faster R-CNN[6],通过多种候选框生成方案获得深度模型,比如SS[7]、RPN等得到感兴趣区域,然后再将其投入分类网络进行打分;另一类是实时速度较快的one-stage网络,如SSD[8]、YOLO系列[9]省去了候选框生成步骤,对全图提取特征完成分类和坐标框的回归,在保证目标框的坐标回归精度的同时也满足了在实时应用场景下的速度要求,从而使该类模型拥有较高的速度-精度平衡。深度网络在检测领域取得的精度极高,在目标检测应用领域有不可撼动的地位。
人脸对齐算法实现方案也多样化,Cao等[10]提出ESR(explicit shape regression)方案,对显示形状进行回归。采用SDM算法[11](supervised descent method)实现非线性最小二乘(non-linear least squares)目标函数,使其以非常快的速度收敛到最小值。LBF[12]方案采用提取局部二值特征进行回归,大幅提升了关键点位置定位速度。PNMS方案[13]引入非连续的线性函数和基于高斯分布的连续函数,改进非极大值抑制算法,对候选窗口重打分,获取精度与速度的提升。以上方案均采用相比深度学习模型较小的轻量级模型,在深度学习架构方案中,Zhang等[14]提出代表性的MTCNN (multi-task convolutional neural network)架构采用深度级联网络,利用人脸检测和人脸对齐的内在联系同时提升这两个任务的性能,其采用统一的三阶段级联CNN由粗粒度到细粒度逐步预测人脸和关键点坐标。其后DAN[15](deep alignment network)使用深度学习方案进行人脸关键点提取,DAN包含多个阶段,每个阶段都对上一阶段估计的人脸关键点位置进行修正。相比其他方法,DAN采用人脸关键点热度图,每一阶段都使用完整的人脸图像而非局部图像块进行特征点估计。上述深度学习方案可以获得具有竞争力的人脸对齐精度,但深度模型受限于庞大的参数量和繁重的深层次结构,即使通过模型压缩和小型化处理也同样为后期集成在硬件造成了极大的阻碍[16]。
随着便携式设备的智能化发展,人脸对齐应用领域大部分需要移植在基础硬件之上,甚至是便携式设备和小型化设备,兼备精度和速度需求的人脸对齐模型日益成为主要需求。人脸检测器对人脸对齐的意义弥足重要,没有一个良好的检测架构提供精确的人脸坐标框的回归,那么众多人脸对齐算法即使再精妙也只是空中楼阁。因此本文基于速度和精度的需求,使用深度学习架构来提供精准的人脸坐标框回归,在传统机器学习算法的基础上,提出多角度初始化算法方案来获得快速的人脸关键点定位。本文做出以下两项工作:1) 以深度学习one-stage网络SSD作为基础,融合分布均匀的共八个特征层进行级联回归预测,选择精准的符合人脸比例的预测框生成尺度形成鲁棒性模型MR-SSD,对多尺度人脸信息做出较好响应的同时节省了时间。2) 基于LBF二值特征的级联回归方案,提出一种基于像素差值的多角度初始化算法,对每一张图片采取五组均匀分隔角度的初始化形状送入模型回归,其后对眼部关键区域计算像素均方差,获得抖动最大的回归形状作为最终特征点的回归形状。本文架构相比于传统的机器学习人脸对齐方案可获得更加精准的面部特征点的回归以及较快的实时速度。
2 人脸检测和人脸对齐架构
2.1 MR-SSD鲁棒模型
SSD架构用于20个类别的目标检测任务,它从不同层次的网络融合多尺度的特征进行级联预测。相比仅仅使用某个层的预测更为精准和完善。同时它又是一个可进行端对端训练且易整合在其他检测系统之中的统一架构,在速度和精度之间有一个较好的平衡。但实际的人脸对齐应用场景要求模型具有较高人脸坐标框的回归精度和实时的检测速度。在面对这样的挑战下SSD性能不足[17]。本文希望通过融合更多层次更均匀尺度的信息来获得更加鲁棒的响应。
如图1(a)所示,SSD中选择的六个层融合的底层特征较少,其中最接近底层的特征层已是第四个卷积块的conv4_3层,而图片的细节信息此时已经在多次卷积过程中逐步转化为语义特征,其选择的六个特征层不能较高程度地涵盖各个尺度的人脸信息[18]。因此本文以特征提取的VGG16的基础网络中增加更底层的con3_3层,以及第五个卷积块的conv5_3层。附加层中选择来自fc7的conv8_2和conv9_2、conv10_2、conv11_2这些均匀层次并保留足够丰富的各个尺度的特征进行融合。其余遵循SSD的处理,裁剪掉VGG架构末端的全连接层,并将最后的池化层改为卷积层。同时选择1: 1,1: 1.3,1: 1.5共三种不同比例生成预测框,可较好地拟合人脸形状。相比SSD的六种尺度,本文节省了一半用于预测框生成的时间成本,同时以更加精准地生成方式为后续坐标框的回归提供了良好的基础。本文的整体架构如图1(b)所示。
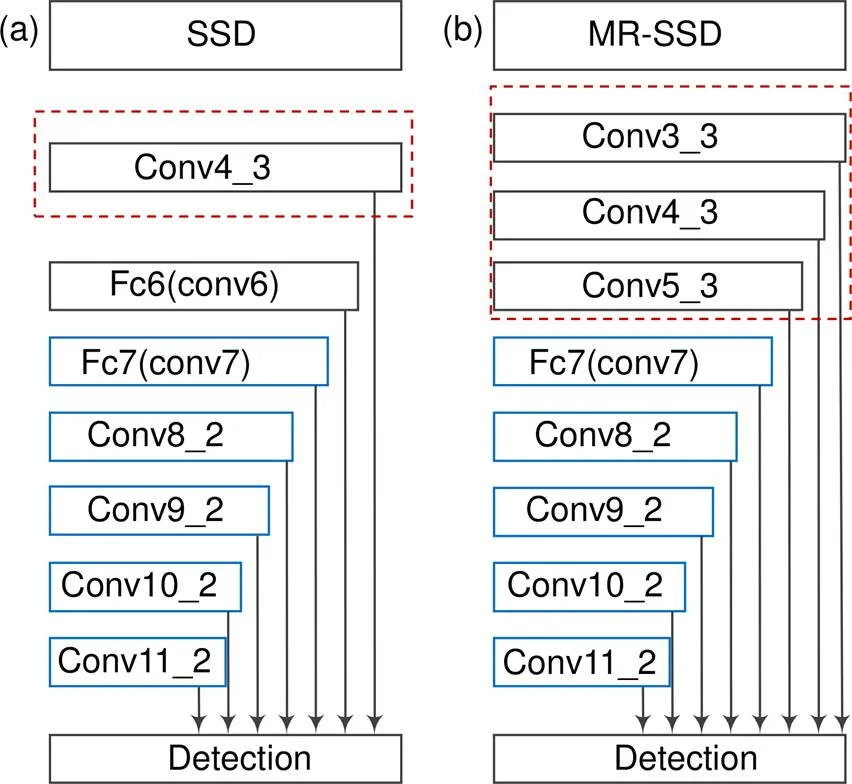
图1 SSD和MR-SSD整体架构
2.2 人脸对齐架构
2.2.1 局部二值特征(LBF)浅析
LBF仅仅提取局部二值特征,这意味着采取该种特征提取方式提升了总体模型的实时性能。该算法由随机森林和全局线性回归相结合而成,对于每一张图采用训练集关键点均值形状作为初始化值,并将其定义为初始形状;在初始形状关键点不同半径范围内,随机生成预测特征点。其后训练随机森林,以随机森林输出的稀疏的“0,1”二值特征向量作为最终的特征点向量。随机森林的应用特点在于对于每一张图的每一个关键点建立多个决策树,每一棵决策树最后都会输出一个值。由图2可知对第一棵决策树执行遍历,到了输出层最左边的子节点,所以该树的输出记为[1,0,0,0]。依此类推,访问到的叶子节点记为1,其他的节点记为0,那么每一个关键点都会拥有一个由决策树组成的森林。对于图2中所有决策树的输出为[1,0,0,0,0,1,0,0,0,0,1,0,…]。
LBF算法将所有的关键点特征级联起来,再用稀疏特征向量训练一个回归器。线性回归是一个不断迭代的过程,即采用上一个阶段的状态作为输入来更新,从而产生下一个阶段的状态,以此类推直到最后阶段:
2.2.2 基于像素差值的多角度初始化算法
在LBF算法中,人脸关键点标志位预先采用训练集人脸关键点均值进行初始化,其后对该关键点形状进行回归。而在实际应用中,人脸倾斜角度往往不是固定不变的,时常会出现侧倾或者左右倾斜情况。同时总体的形状均值往往维持在端正人脸的正负几度之内。因此对于这种多角度倾斜的人脸,统一采用整体均值形状进行初始化,对于正脸来说效果比较精准,而对于具有一定倾斜角度效果欠佳。对后期的回归造成了极大的困难,这就需要应用模型具有抗倾斜度的鲁棒性。
为此,针对不同角度的人脸倾斜,本文提出基于像素差值的多角度初始化算法来实现精确鲁棒的特征点的回归。根据像素差异可将人脸划分为不同的区域。额头、腮部区域内均由皮肤覆盖,因此额头以及腮部区域内像素差异微小;但眼部区域有黑色瞳孔和白色眼白,同时还有睫毛和眼袋,这决定了眼部区域内像素差异较大。因此,本文在五大关键点区域中选择像素差异抖动最大的眼部区域作为评判最优回归形状的关键区域。
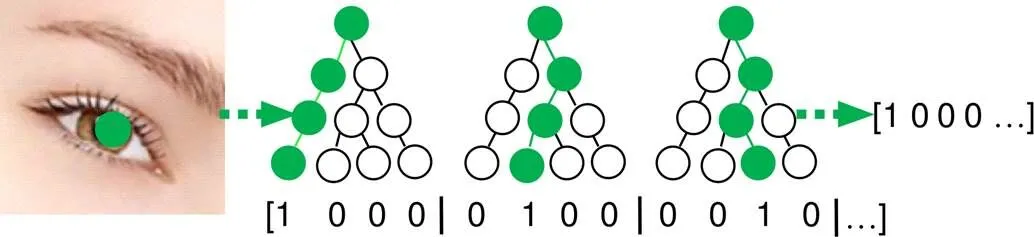
图2 随机森林

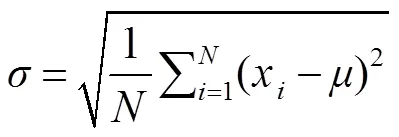
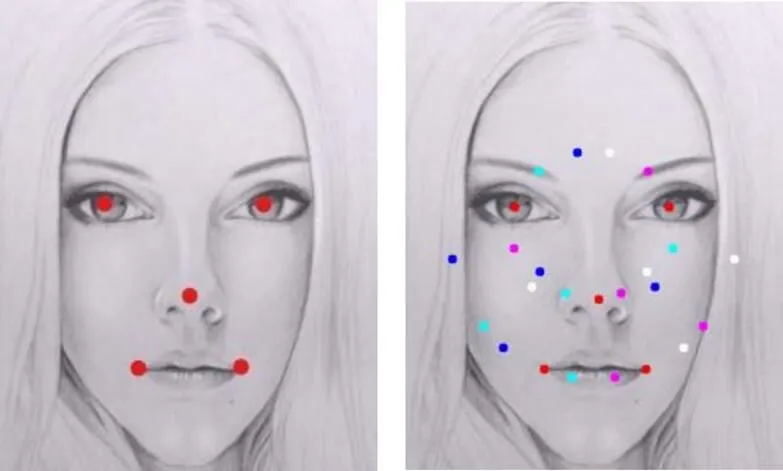
图3 不同角度初始化算法
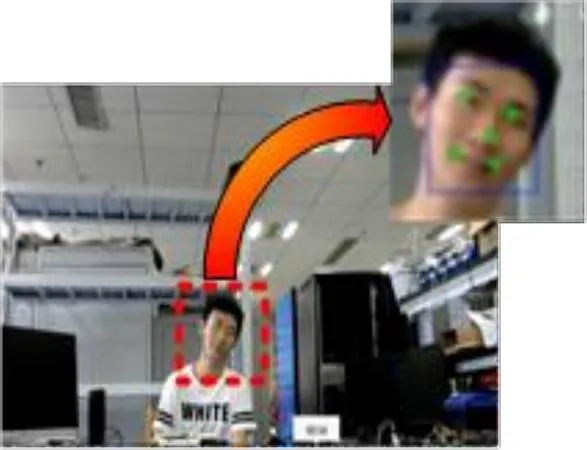
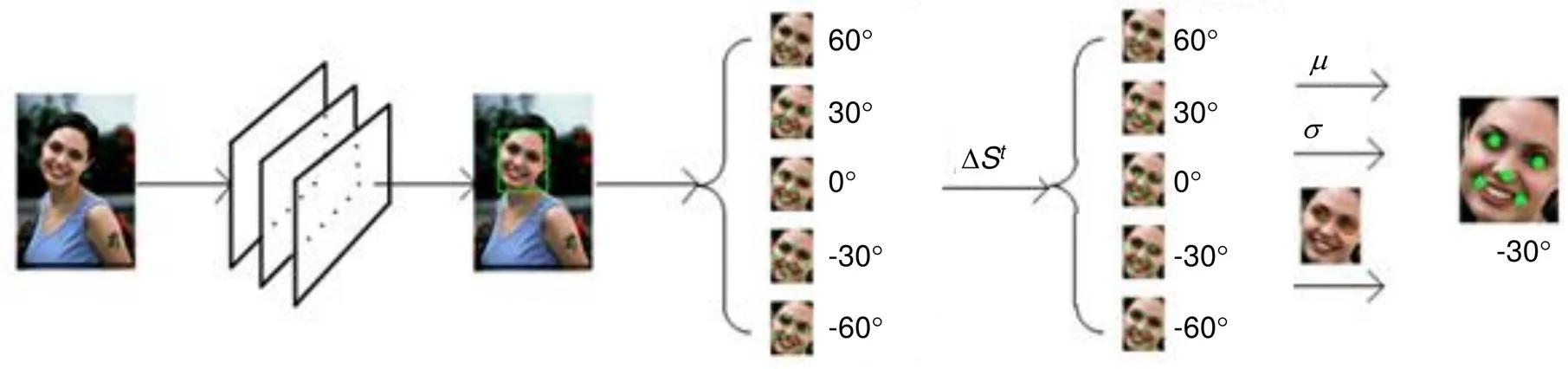
在预测阶段,本文提出统一架构如图4所示。首先对于每一张输入的预测图片使用MR-SSD检测器获得人脸坐标框。其次针对检测出的人脸使用如上所述的包括正负30°、正负60°以及基准形状五种人脸特征点形状对人脸关键点进行多角度初始化。其次将检测得到的人脸以及五组初始化形状送入LBF训练,对每一组初始化形状进行回归,可获得五组回归后的人脸关键点形状。此时每一组人脸形状相比初始化状态均已有了向真值形状靠近的关键点位置。
为了得到五组预测所得人脸关键点形状中最为精准的一组,采用如上所述在左眼、右眼为中心确立固定半径的区域,计算该区域内各组预测形状的像素差,像素抖动最为明显的一组被认定为更好地贴近了眼部真值区域。因此对每一种回归后形状的两个眼部关键点区域计算均方差目标函数,选出最大值,即代表该种形状的两个预测眼部关键点位于人脸像素抖动差异最大的眼部区域,因此也被认定为最终的预测结果。该方案相当于对倾斜的人脸引入一定的修正。
3 实验结果
本文训练环境搭建在ubuntu14.04系统下进行开发,采用cuda8.0版本、cudnn5.0版本进行GPU加速,使用opencv3.1版本库以及caffe深度学习框架,8G NVIDIA GTX 1080型号显卡,不同组别对比实验显卡数目存在区别。测试环境使用8G NVIDIA GTX 1060显卡进行实验,其余实验条件与上述一致。
图4 整体架构
3.1 人脸检测器
将MR-SSD与SSD分别在FDDB,Wider Face两个数据集进行测试,使用2张8G NVIDIA GTX1080计算。测试集使用FDDB全部测试集,以及Wider Face的easy、medium和hard的全体测试集。所得PR曲线如图5所示。由图5(a)可知,在FDDB数据集上,当召回率为0.8时,MR-SSD可获得0.89的预测精度,相比传统SSD的0.81高出0.08。当召回率为0.9时,MR-SSD仍然可以维持0.8的预测精度,而SSD的预测精度此时快速下降至0.69,远远低于常规任务人脸检测的期望效果。在Wider Face数据上由图5(b)可知,当召回率为0.8时,MR-SSD达到0.86的预测精度,SSD只能达到0.75。当召回率为0.9时,MR-SSD可获得0.86的预测精度,相比SSD的0.75高出11%精度。由该组对比实验可知,本文通过增加融合不同尺度的特征层,修改适合人脸比例的预测框生成尺度,使得模型在FDDB以及Wider Face数据集上获得了较之传统算法10%提升的平均检测精度。
由表1可知,在NVIDIA GTX 1060显卡下,对FDDB的全体测试集进行实验,可看出MR-SSD不但在平均精度上获得10%左右的提升,同时可获得41 f/s的实时速度,也维持在与SSD相同的水准。可知尽管在级联预测结构中,本文相比SSD多融合了两个特征层用以训练更加鲁棒的模型,选择了更适合人脸尺度的比例,比SSD的六种生成方式降低了一半的无用比例生成成本,因此网络达到较快的实时速度,MR-SSD获得了一个更好的速度-精度的平衡点。
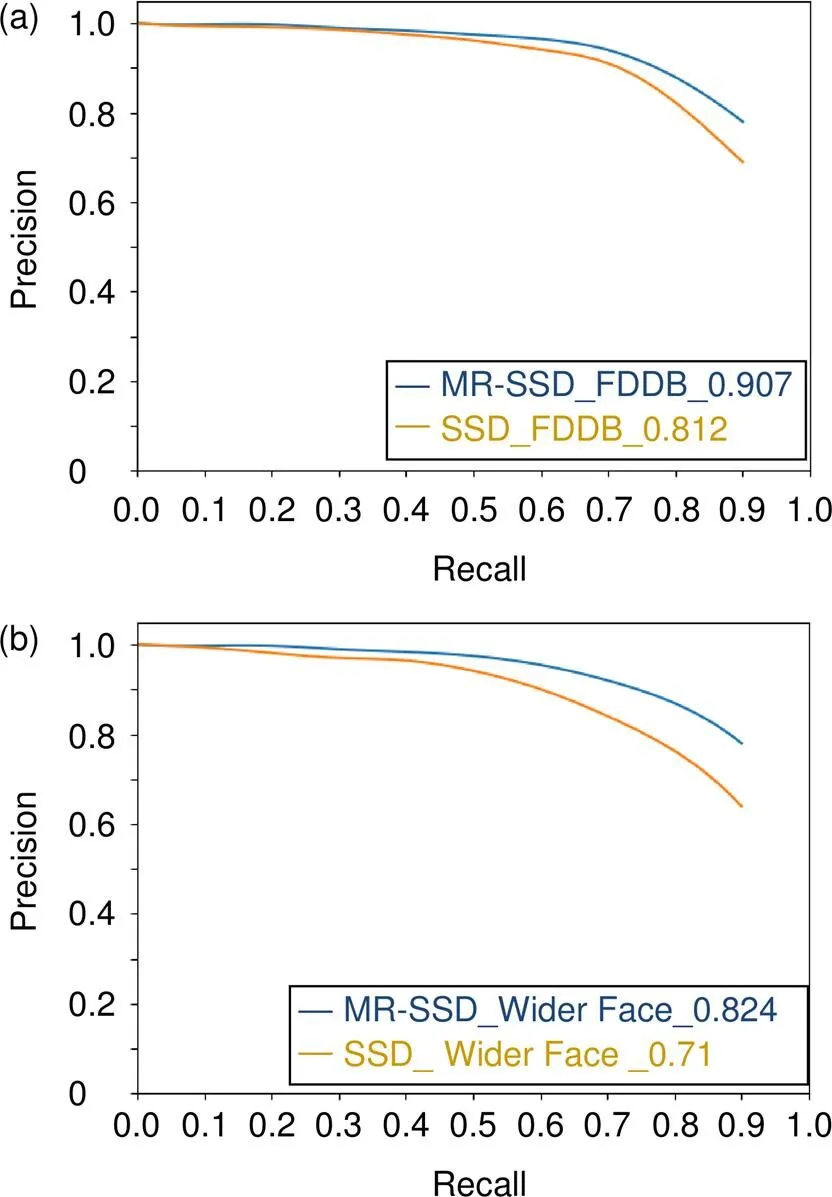
图5 MR-SSD与SSD比较。(a) FDDB;(b) Wider Face
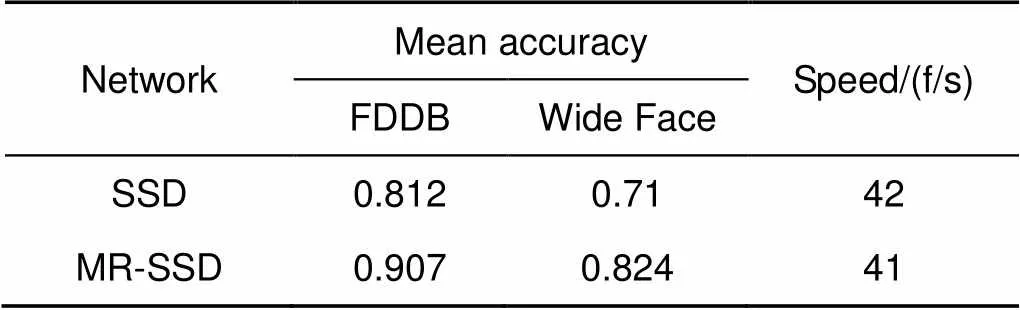
表1 精度与速度的比较
3.2 基于像素差异的多角度初始化算法
3.2.1 人脸对齐性能分析
使用经典的人脸对齐算法ESR、SDM、PNMS三种惩罚措施架构,与深度学习方案MTCNN、DAN在AFLW数据集上进行测试获得平均错误率如图6。平均错误率(mean error)计算方式是由左眼、右眼、鼻子、左嘴角和右嘴角五个关键点真值与各个架构所得预测值求误差,并将AFLW所有测试图片求平均数而得。
由图6可知,本文架构在AFLW人脸测试集上对左眼、右眼、鼻子、左嘴角和右嘴角五个关键点可得5%的平均误差率,相比于ESR的13%误差率、SDM8.5%的误差率,以及PNMS系列算法获得约6.9%的误差率大幅度降低。同时相比于深度学习方案中MTCNN架构6.9%的平均误差率降低1.9%,仅比DAN网络高0.4%。本文架构在五个关键点定位精度方面优于多种传统机器学习算法以及深度学习经典架构MTCNN。
表2中数据由文献[13]中获取,本文算法在显卡性能远低于文献[13]中显卡的条件下,仍可获得优于MTCNN、PNMS-linear的平均检测速度,并与实时性最好的PNMS-Gaussian方法仅存微小差别。由表3可知本文方案在对齐速度优于传统算法SDM和深度学习架构DAN,虽远低于LBF实时速度,但精度优于LBF。本文在速度与精度平衡方面有一个较好的提高。
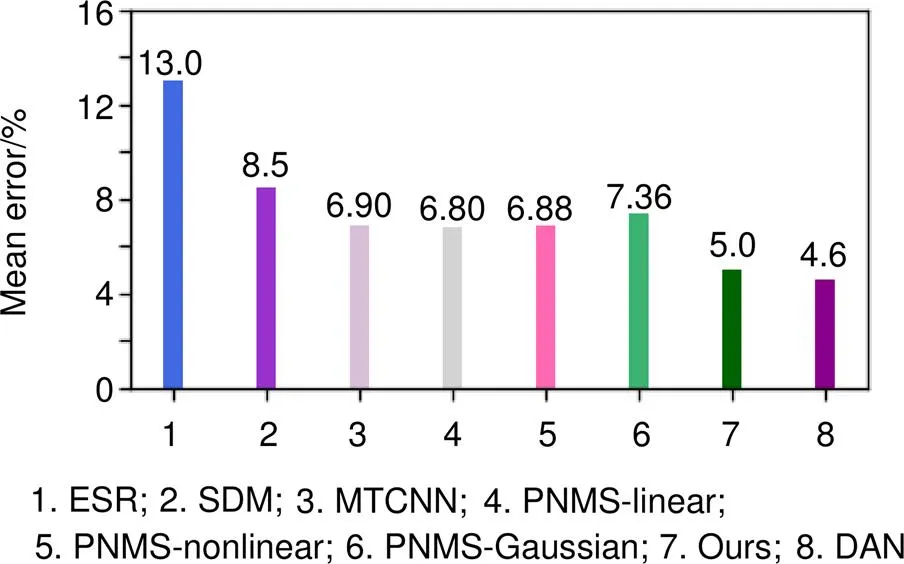
图6 各算法在AFLW 上的表现
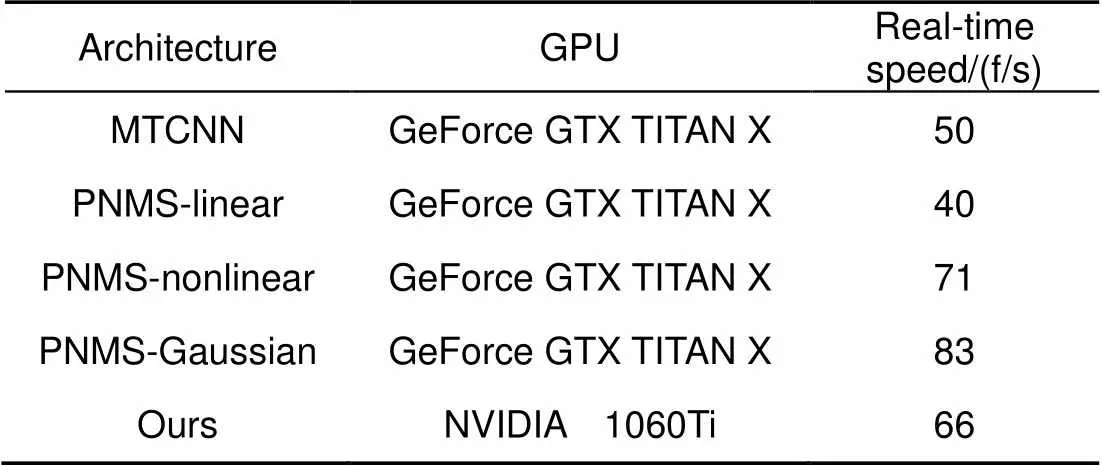
表2 平均人脸检测速度的比较
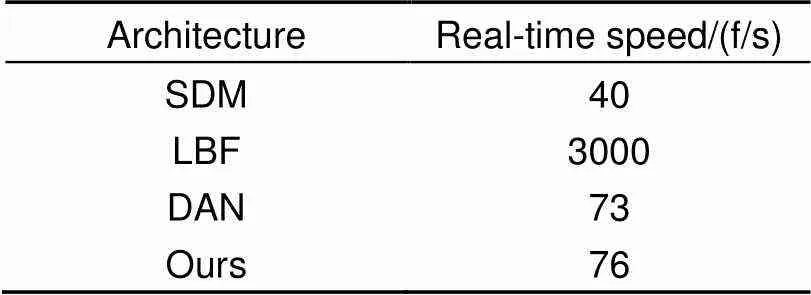
表3 平均对齐速度的比较
3.2.2 图片分析
使用本文的多角度初始化算法与LBF级联回归模型在AFLW测试集与Helen测试集抽样500张测试图片进行对比,LBF采用OpencV3.1自带检测器。由表4可知,LBF架构在左眼、右眼、鼻尖、左嘴角以及右嘴角五个关键点定位获得7.9%的平均误差率,本文使用MR-SSD检测器并采用多角度初始化算法可获得5.4%的平均误差率。本文人脸对齐方案相比LBF可在五个关键点定位表现取得优势。抽样测试图片如7。由图7(a)可看出,LBF架构在人脸具有不同角度倾斜时均出现特征点偏移现象,定位与真值相去甚远。由图7(b)可知本文方案在面对多种倾斜侧脸时均有精确的特征点回归。
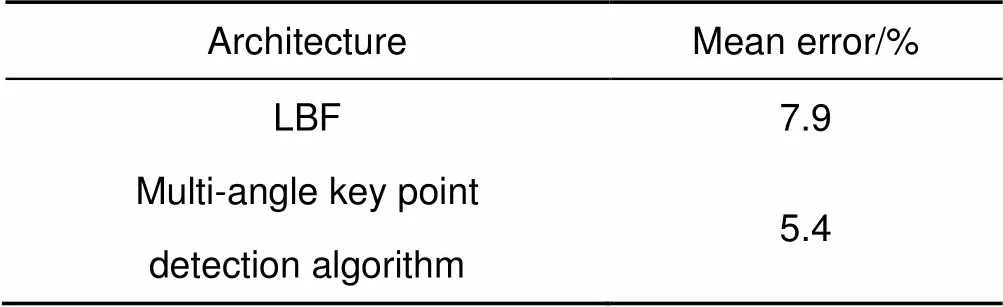
表4 测试图片关键点检测平均误差
3.2.3 实时USB摄像头下分析
由图8(a)可以看出,在USB摄像头下进行实时检测以及特征点回归时,无论左倾或右倾都能得到非常精确的人脸框的回归和特征点定位。图中展示了稳定的正负45°范围内的实时检测效果。
在此基础之上,进一步验证MR-SSD结合基于像素差值的多角度初始化算法的整体架构在远距离实时场景下的应用。由图8(b)可以看出,在远距离摄像头下,人脸信息已极其微小,并且在背景复杂的情况下,对于向左和向右倾斜的人脸,MR-SSD检测器仍可以获得精准的坐标框的回归。在高精度人脸框的基础之上,多角度初始化算法对于正负大角度倾斜的人脸同样取得了精确的关键点定位。
将本文所提MR-SSD结合多角度初始化算法架构与LBF对比如表5。本文算法在HELEN数据集上得到3.61的瞳孔间距损失,在LFPW数据集上可取得2.17的损失。在两个主流数据集上均获得比LBF较大的提高。同时从倾斜角可容错程度对比可得LBF只能针对端正人脸正负10°左右范围内进行较为精准的回归。而本文最优架构可获得实时场景下正负50°稳定的人脸框的坐标回归以及非常精准的特征点的回归。
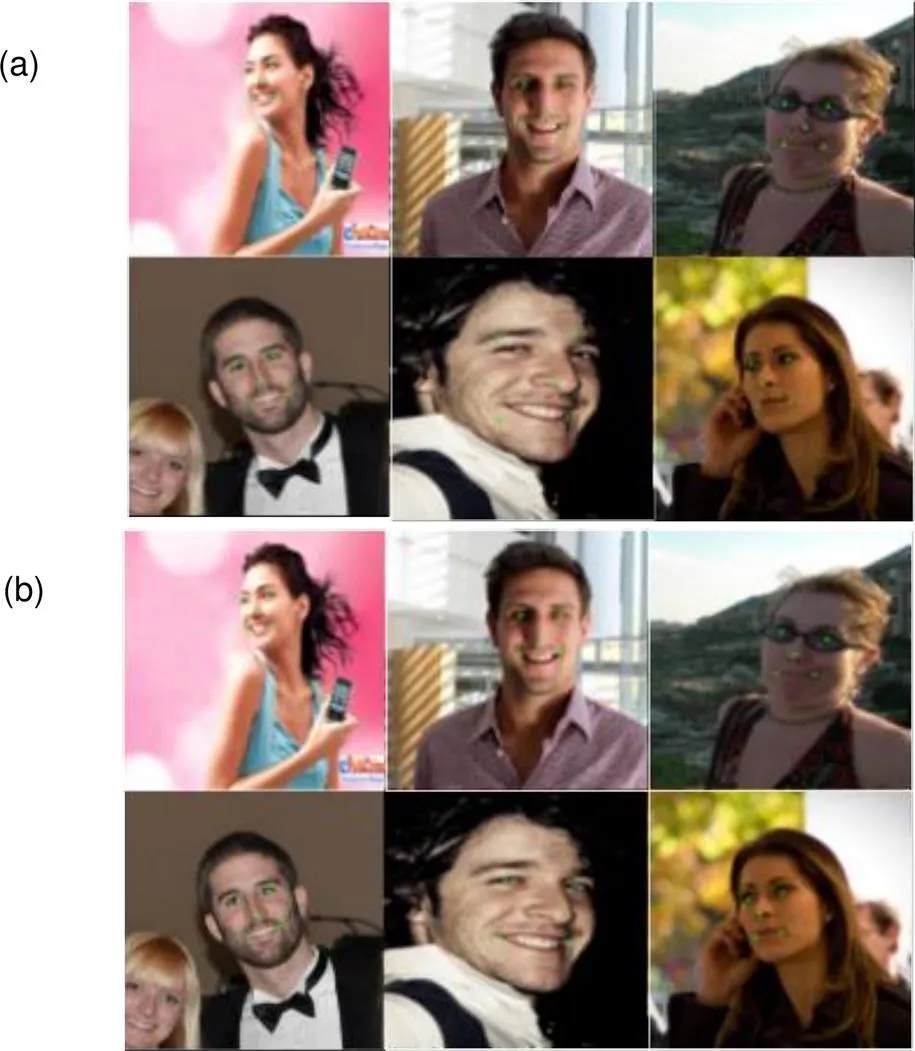
图7 关键点定位对比。(a) LBF回归结果;(b) 本文架构回归结果
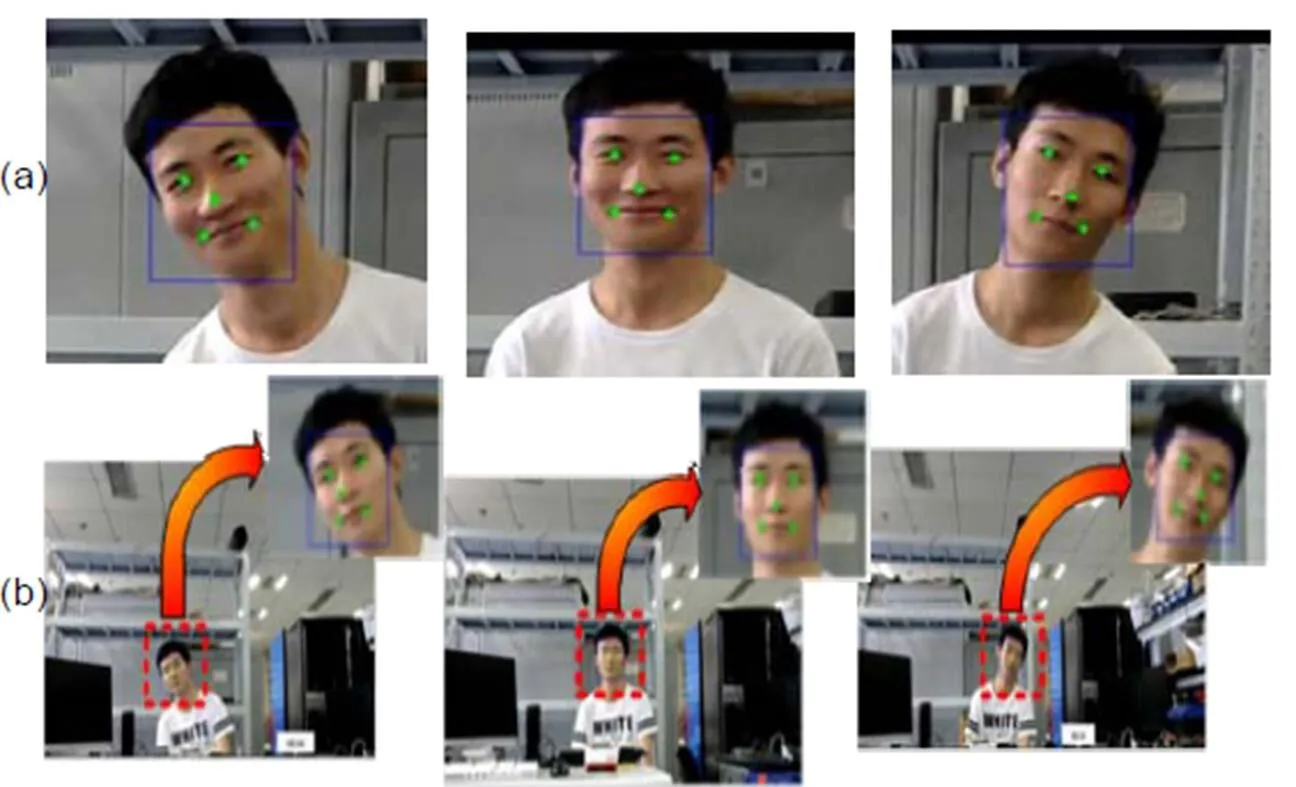
图8 不同距离关键点检测效果对比。(a) 近距离角度;(b) 远距离倾斜角度
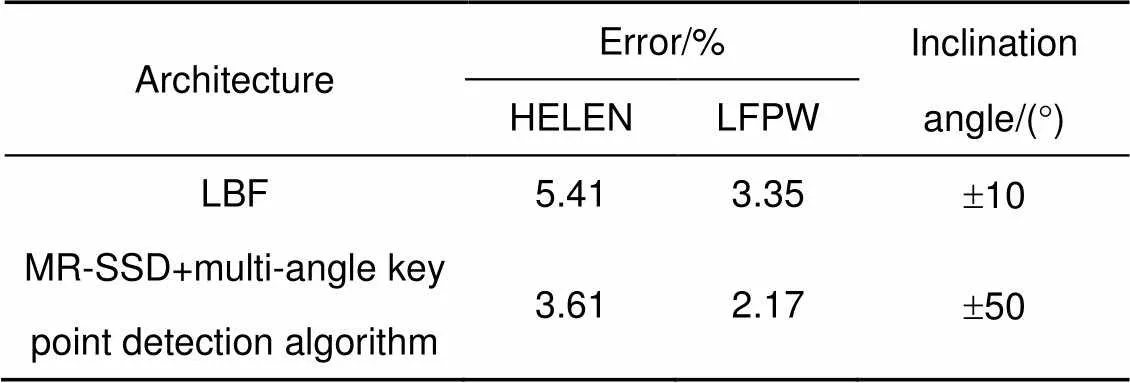
表5 变化倾斜角下不同算法的效果对比
4 结 论
本文采用改进后的one-stage人脸检测MR-SSD获得精确的人脸框坐标回归,并且在轻量级机器学习方案LBF基础之上,提出基于像素差异的多角度初始化算法,在预测阶段获得了对于多角度倾斜人脸关键点的精确回归。本文从小型化快速化设计理念出发,在充分考虑实时应用场景的速度与精度要求下设计整体网络架构。最终为将该模型应用于便携式设备以及可移动设备提供可能并取得鲁棒的表现。
本文认为在基于像素差值的初始化算法基础上,进一步细分角度范围将会带来更加优异的精度提升,但同时也不可避免地增加计算负担。因此,如何在不增加时间成本和模型量级的前提下,实现更加精准的特征点的回归方案,将有必要进行深入的探索。
[1] Wang Y M, Pan G, Wu Z H. A survey of 3D face recognition[J]., 2008, 20(7): 819–829.
[2] Peng M C, Bao J, Ye M,. Face alignment algorithm based on shape parameter regression[J]., 2016, 29(1): 63–71.
[3] Zhu C R, Wang R S. Adaptive facial feature selection algorithm[J]., 2002, 14(1): 26–30.
[4] Girshick R, Donahue J, Darrell T,. Rich feature hierarchies for accurate object detection and semantic segmentation[C]//, 2014: 580–587.
[5] Girshick R. Fast R-CNN[C]//(), 2015: 1440–1448.
[6] Ren S Q, He K M, Girshick R,. Faster R-CNN: towards real-time object detection with region proposal networks[C]//, 2015: 91–99.
[7] Uijlings J R R, van de Sande K E A, Gevers T,. Selective search for object recognition[J]., 2013, 104(2): 154–171.
[8] Liu W, Anguelov D, Erhan D,. SSD: single shot multibox detector[C]//2016: 21–37.
[9] Redmon J, Divvala S, Girshick R,. You only look once: unified, real-time object detection[C]//(), 2016: 779–788.
[10] Cao X D, Wei Y C, Wen F,. Face alignment by explicit shape regression[J]., 2014, 107(2): 177–190.
[11] Xiong X H, De la Torre F. Supervised descent method and its applications to face alignment[C]//, 2013: 532–539.
[12] Ren S Q, Cao X D, Wei Y C,. Face alignment at 3000 FPS via regressing local binary features[C]//, 2014: 1685–1692.
[13] Li Z D, Zhong Y, Chen M,. PNMS algorithm based on penalty factors for face detection and alignment[J]., 2018, 50(6): 225–231. 李振东, 钟勇, 陈蔓, 等. 基于惩罚因子的PNMS算法的人脸检测和对齐[J]. 工程科学与技术, 2018, 50(6): 225–231.
[14] Zhang K P, Zhang Z P, Li Z F,. Joint face detection and alignment using multitask cascaded convolutional networks[J].201623(10): 1499–1503.
[15] Jiao F, Shan S G, Cui G Q,. Face recognition based on local feature analysis[J]., 2003, 15(1): 53–58.
[16] Song H, Shi F. Multi-view face detection and pose discrimination in video[J]., 2007, 19(1): 90–95.
[17] Zhang S F, Zhu X Y, Lei Z,. S3FD: single shot scale-invariant face detector[C]//, 2017: 192–201.
[18] Wan J, Li J, Chang J,. Face alignment on local-shape-based combined model[J]., 2018, 41(9): 2162–2174.
[19] Bodini M. A review of facial landmark extraction in 2D images and videos using deep learning[J]., 2019, 3(1): 14.
Multi-angle key point detection of face based on deep learning detector
Zhao Xingwen, Hang Lijun*, Gong Enlai, Ye Feng, Ding Mingxu
College of Automation, Hangzhou Dianzi University, Hangzhou, Zhejiang 310018, China
Architecture
Overview:The introduction and maturity of deep learning technology greatly promote the development of object detection and key point detection technology. Face alignment, as an extension of the task of face detection, as well as the basis of face calibration and face recognition, is of great significance. For example, in expression recognition, face alignment provides possibilities for the research of emotion recognition. In addition, many applications with the function of beautifying pictures, including face polishing, dynamic face changing effects and so on, need face alignment technology to get facial feature points or feature areas for related operations. There are many methods for realizing face alignment algorithm. Cao et al. put forward ESR (explicit shape regression) scheme to regress the display shape. SDM algorithm uses supervised descent method to achieve the objective function of non-linear least squares, so that it converges to the minimum at a very fast speed. The LBF scheme uses the method of extracting local binary features for regression, which greatly improves the speed of location of key points. In the PNMS scheme, discontinuous linear functions and continuous functions based on Gauss distribution are introduced to improve the non-maximum suppression algorithm, and the candidate windows are re-scored to improve the accuracy and speed. In the scheme of deep learning architecture, Zhang et al. proposed the representative MTCNN (multi-task convolutional neural network) architecture using the deep cascade network, which improves the performance of tasks by utilizing the intrinsic relationship between face detection and face alignment. The unified three-stage cascade CNN is used to advance from coarse-grained to fine-grained step by step. Later, DAN (deep alignment network) used in-depth learning scheme to extract key points of human face. DAN contains many stages, each stage is to modify the position of key points of human face estimated in the previous stage. Based on the requirement of speed and accuracy, the paper uses deep learning architecture to provide accurate regression of face bounding box, and then a multi-angle initialization algorithm is proposed to achieve fast face key point location. This paper makes the following two tasks: 1) On the basis of one-stage network SSD, cascaded regression prediction is carried out by fusing eight feature layers with uniform distribution, and a robust model MR-SSD is formed by choosing the scale of accurate prediction which accords with the proportion of faces, and can make better response to multi-scale face information and save time. 2) A cascade regression scheme based on LBF binary feature is proposed, and a multi-angle initialization algorithm based on pixel difference is proposed. Five groups of uniformly separated initial shapes are used for each image to be fed into the model regression. Then the mean square deviation of the pixels is calculated for the key areas of the eye, and the regression shape with the largest jitter is obtained as the final regression shape of points. Compared with the traditional face alignment scheme based on machine learning, the architecture can obtain more accurate facial feature points regression and faster real-time speed.
Citation: Zhao X W, Hang L J, Gong E L,Multi-angle key point detection of face based on deep learning detector[J]., 2020, 47(1): 190299
Supported by National Natural Science Foundation of China (51777049) andYouth Science Foundation (51707051)
* E-mail: ljhang@hdu.edu.cn
Multi-angle key point detection of face based on deep learning detector
Zhao Xingwen, Hang Lijun*, Gong Enlai, Ye Feng, Ding Mingxu
College of Automation, Hangzhou Dianzi University, Hangzhou, Zhejiang 310018, China
In order to meet the speed and accuracy requirements of face key point detection (face alignment) in application scenarios, firstly, cascaded prediction is carried out on the basis of SSD (single shot multibox detector), which combines more uniformly distributed feature layers to form MR-SSD (more robust SSD), a deep learning detector with more robust response to multi-scale faces. Secondly, based on the cascade shape regression method of local binary feature (LBF), a multi-angle initialization algorithm based on the difference between the facial pixels is proposed. Five groups of feature points in the 90 degree inclination range of positive and negative face are initialized to achieve excellent fitting effect for inclined face under multi angles. The mean square deviation of each group of feature points after regression is calculated and the maximum corresponding shape is used as the final regression shape. The optimal architecture proposed in this paper can obtain robust face bounding box and face alignment schemes against multi-angle tilt in real time.
deep learning; machine learning; face keypoint detection; face alignment; pixel difference
TP391
A
赵兴文,杭丽君,宫恩来,等. 基于深度学习检测器的多角度人脸关键点检测[J]. 光电工程,2020,47(1): 190299
10.12086/oee.2020.190299
: Zhao X W, Hang L J, Gong E L,. Multi-angle key point detection of face based on deep learning detector[J]., 2020,47(1): 190299
2019-05-31;
2019-09-17基金项目:国家自然科学基金资助项目(51777049);青年科学基金资助项目(51707051)
赵兴文(1995-),男,硕士,主要从事深度学习、计算机视觉的研究。E-mail:18405813956@163.com
杭丽君(1979-),女,博士,教授,主要从事电力电子与电力传动、深度学习的研究。E-mail:ljhang@hdu.edu.cn
