典型环境下飞行辅助安全增强驾驶系统
2020-01-16白荣强吴行
白荣强,吴行
典型环境下飞行辅助安全增强驾驶系统
白荣强,吴行
(中国飞行试验研究院,陕西 西安 710089)
航空安全一直是飞机设计、制造、试飞和使用的关注焦点,辅助安全增强系统可减少复杂条件下的驾驶员误操作和不恰当操作,提升民用航空器的安全性。研究在侧风条件下精密进近和避免可控飞行撞地的飞行辅助安全增强驾驶系统,利用PID控制方法设计了辅助安全增强驾驶的控制律。仿真结果表明当飞机进入危险状态时,辅助安全增强控制系统可以主动、迅速、准确、安全地将飞机从危险状态中改出,使飞机按照既定的姿态和航迹飞行。
辅助安全增强驾驶;可控飞行撞地;大侧风进近;PID控制
1 引言
航空发展初期,驾驶员是飞机的操控者,驾驶员根据飞机的状态做出判断决策,并采取相应的动作。随着控制技术、网络技术和智能技术的发展,驾驶员的角色悄然发生变化,驾驶员从驾驶飞机逐渐向管理飞机过渡,人机混合决策是未来飞行系统的发展方向。
通过人机混合决策,可监控和减少人为失误,弥补人力不足,减少复杂条件下的驾驶员误操作和不恰当操作,辅助驾驶员更好地完成任务,提升民用航空器的安全性。通过人机混合决策,可有效阻止人为恶意操纵,通过接管操纵应对劫机等事件,提升民用航空器的安保水平[1]。
2 飞机建模
本文选择某型飞机作为研究对象的理由如下:该机是一架四发运输机,符合动力飞行的基本要求,其气动布局具有一般民机的特点,研究结果也适用于一般民机;该机操纵 系统采用中央盘式操纵,杆力特性、人感系统特性均符合目前典型民机的操纵系统特点;现有该机的飞行仿真模型以及与之配套的飞行模拟器,可以更好地验证所设计的相关控制律。
2.1 常值侧风条件下样例飞机的动力学建模
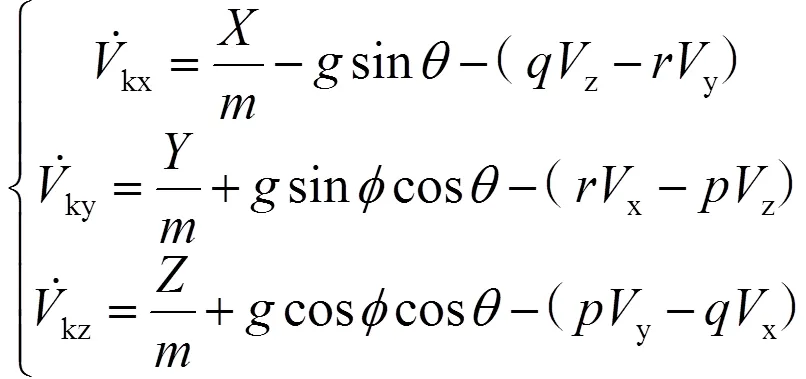
样例飞机属于大型飞机,其机体尺寸较大,沿翼展方向上的不同点所受到风场的诱导速度是不同的,由此会造成样例飞机六自由度状态发生变化,因而在样例飞机建模时要考虑风梯度对飞机转动的影响[2]。在机体坐标系下,建立样例飞机的运动学方程,即力方程组:
力矩方程组:

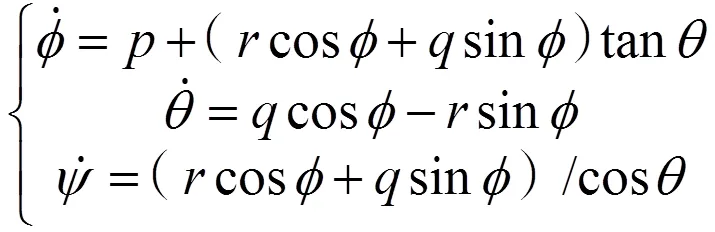
角运动方程组:
线运动方程组:

式(1)~(4)为样例飞机动力学建模的核心方程,其中kx,ky,kz分别为飞机航迹速度k在机体坐标系,,轴上的分量;,,分别为飞机轴向、侧向、法向的作用力;为飞机的质量;为重力加速度;x,y,z为飞机对机体轴系3个坐标轴的惯性矩;,,为飞机的滚转、俯仰、偏航力矩;g,g,g分别为飞机质心在跑道坐标系下的位置。
由于本文研究内容是在侧风条件下精密进近的安全增强驾驶控制系统,所以在横侧向的小扰动方程中,需要加入侧风项,而纵向的小扰动方程不需要进行改动,修改后的纵向和横侧向运动方程如下[3]:
式(5)中:为状态向量;为状态矩阵;为操纵矩阵;为控制向量。
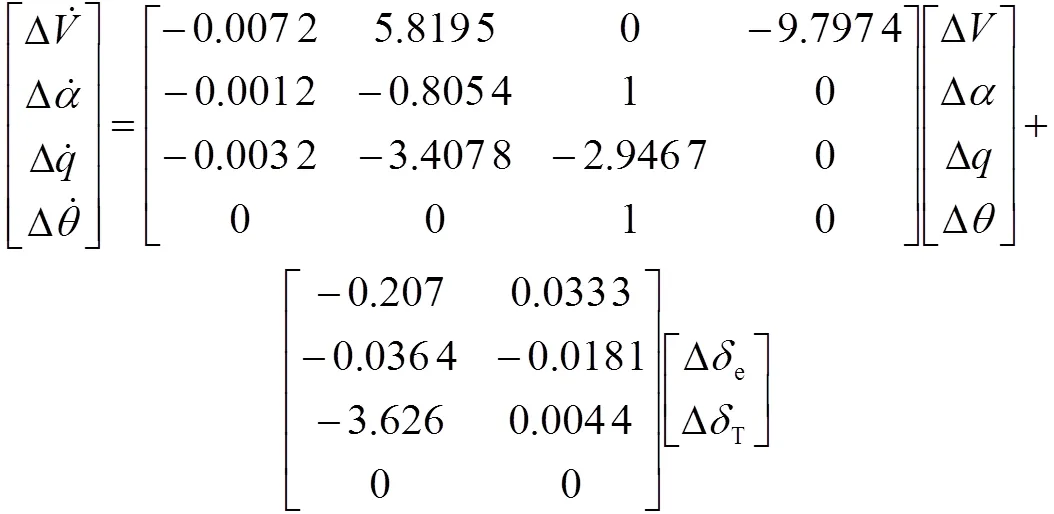
飞机纵向运动方程的矩阵形式为:
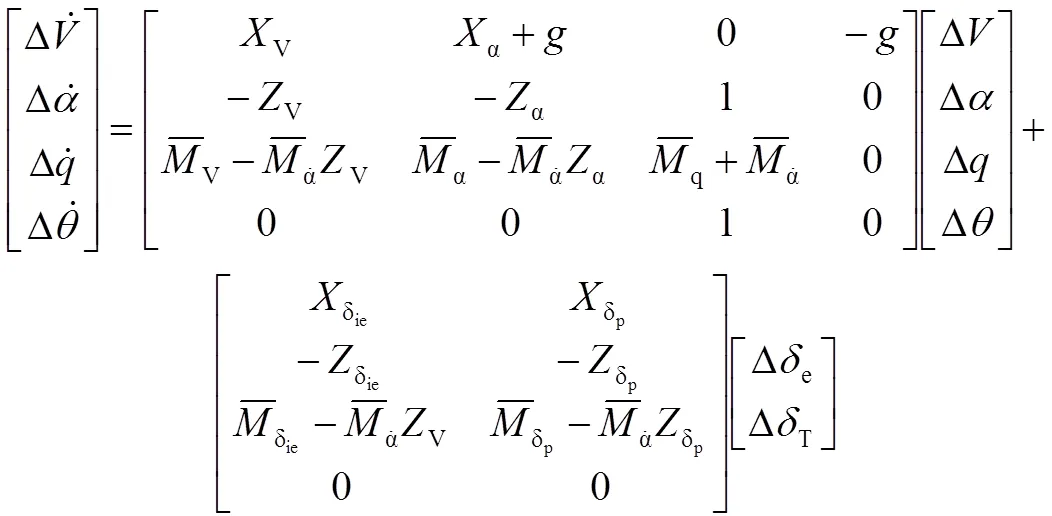
式(6)中:状态向量=[∆∆∆]T;操纵向量=[∆e∆T]T;∆e为升降舵偏角增量,定义升降舵下偏为正;∆T为油门输入增量[4]。
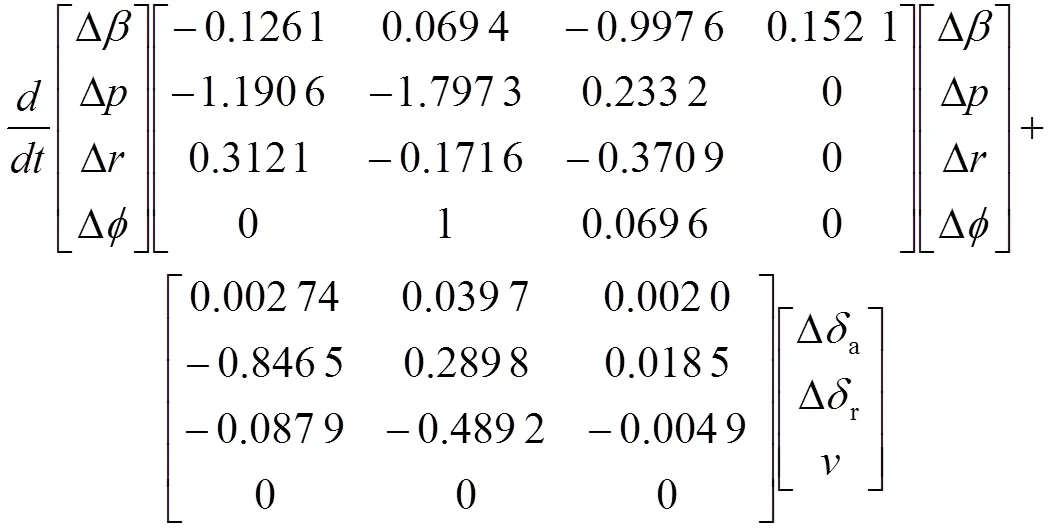
飞机横侧向运动方程的矩阵形式为:
式(7)中:状态向量=[∆∆∆∆]T;操纵向量=[∆a∆r]T;∆a为副翼偏角增量,定义右副翼下偏为正;∆r为方向舵输入增量,定义方向舵左偏为正;为侧向风速。
2.2 配平点处的运动方程
民用飞机的进近着陆过程相对复杂,整个过程大致可以分为5个阶段:定高飞行(离地300~500 m)、高度捕获、下滑、拉平(离地大约15 m)以及着陆滑跑。本文仅研究下滑过程中有侧风影响的安全增强驾驶控制技术,所选取的配平点处飞行状态如表1所示[5]。
表1 飞行状态选取
序号重量/t构型马赫数气压高度/m重心起落架襟翼 1110着陆0.2350032%放下0°
纵向方程:
横向方程:
3 典型场景下安全增强系统控制律设计
3.1 侧风条件下进近过程的安全增强驾驶控制律的设计
在设计控制系统时控制框架的选取十分关键,控制结构比控制律参数对系统控制效果的影响大很多,因而在控制律设计时首先需要考虑如何选取合适的控制结构,之后才能根据性能指标的要求设计控制参数[6]。
PID线性控制方法应用广泛,采用PID控制方法设计安全增强驾驶控制系统须由内而外,先设计阻尼回路,然后设计姿态回路,最后是航迹控制。在设计最内层回路时,需根据飞机自然特性分析结果判断设计阻尼回路,还是增稳回路,或者阻尼增稳内回路,这对系统性能十分关键。通常角速度反馈回路能够改善阻尼特性,然而过大的角速度反馈会减小系统的静态增益,降低了系统运动模态的静操纵性,因而角速度反馈不宜过大。此外,引入气流角反馈回路能够改善系统的静稳定性[7]。侧风条件下整个进近阶段安全增强控制结构如图1所示。

图1 侧风条件下进近阶段辅助安全增强控制结构框图
3.2 近地告警危险高度拉起的安全增强驾驶控制律的设计
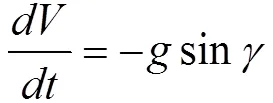
飞机一般从开始改出俯冲,直到改出俯冲结束,这一过程存在一定的高度损失,高度损失通常经过近似估算得出,近似估算的时候,可以认为改出俯冲的过程中发动机的推力与飞机的阻力基本相等,则运动方程为:

可简化为:
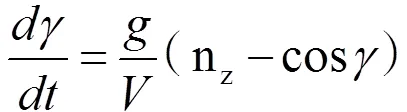
式(10)和(11)相除,可得:
如果改出俯冲开始时的速度和航迹角为1和1,结束时的速度和航迹角分别为和,其中=0,并且认为改出俯冲过程中的nz为常数,则对式(12)进行积分,得到改出俯冲结束时的飞行速度为:
考虑到发动机的推力等于飞行阻力,因此改出俯冲过程中的高度损失也可以用能量守恒定律计算得出:

将(13)式带入(14)式,就可以得出改出俯冲高度损失的计算公式为:
由此可以看出,只要知道了开始改出俯冲时的速度1、航迹倾角1和平均过载nz,就可以计算出改出俯冲时的高度损失[8]。
危险高度拉起的触发条件:本文假设危险高度= 300 m,即要求飞机在300 m的高度以上飞行。计算高度损失∆时,可以认为nz是一个常数。但是,实际上建立飞机的法向过载需要一定的时间,在建立法向过载的过程中时,高度会存在一定的附加损失,所以在确定触发条件时,需要补偿这一附加损失,假设0时刻飞机的高度为0,则危险高度拉起的触发条件为:
0-∆<360 (16)
以上给出了危险高度拉起的触发条件,其前提是飞机在铅垂面内运动,即假设飞机的滚转角始终为0。当飞机不在铅锤面,即带有非零滚转角时,利用式(14)计算损失高度∆则会带来比较大的误差,并且当飞机带有非零滚转角时,把飞机拉起需要的时间较长。为了克服非零滚转角带来的误差,并使飞机可以迅速拉起,可以考虑在满足拉起触发条件(15)之前,对飞机进行横向改平,本文选取:
0-∆<1 000 (17)
为横向改平的触发条件,即式(17)满足时,安全增强驾驶系统会使飞机在接近危险高度之前,把滚转角调整 为0[9]。
纵向控制律设计:该控制律设计的内回路选取俯仰角速率进行负反馈,其控制律结构如图2所示。
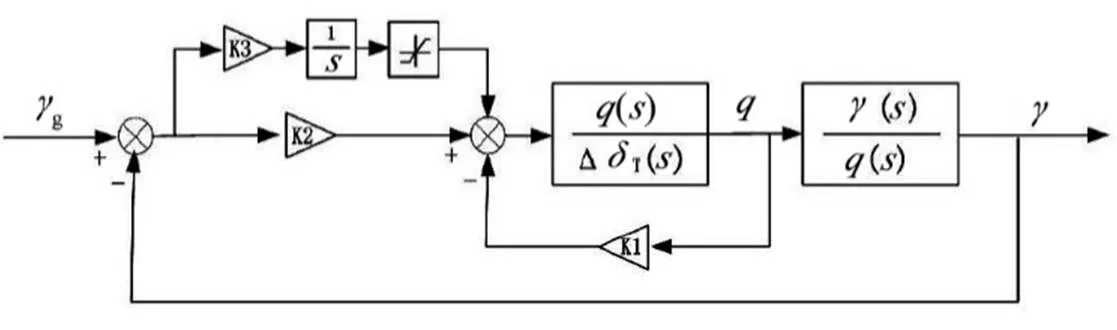
图2 航迹角控制律结构图
横向控制律设计:该控制律是要进行改平操纵,即把滚转角调整为0,其控制律的结构如图3所示。
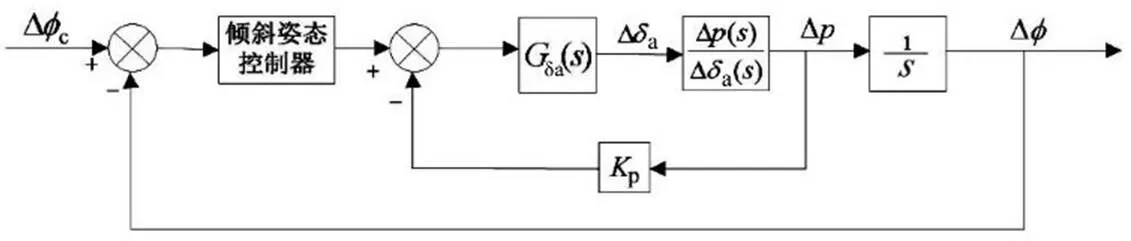
图3 副翼通道控制结构图
4 安全增强驾驶控制律的仿真验证
4.1 危险高度拉起安全增强驾驶控制律的仿真实验
飞机的滚转角等于0:假设飞机的初始状态为高度= 2 000 m、航迹角=﹣14°、速度=105 m/s,则其仿真结果如图4所示。
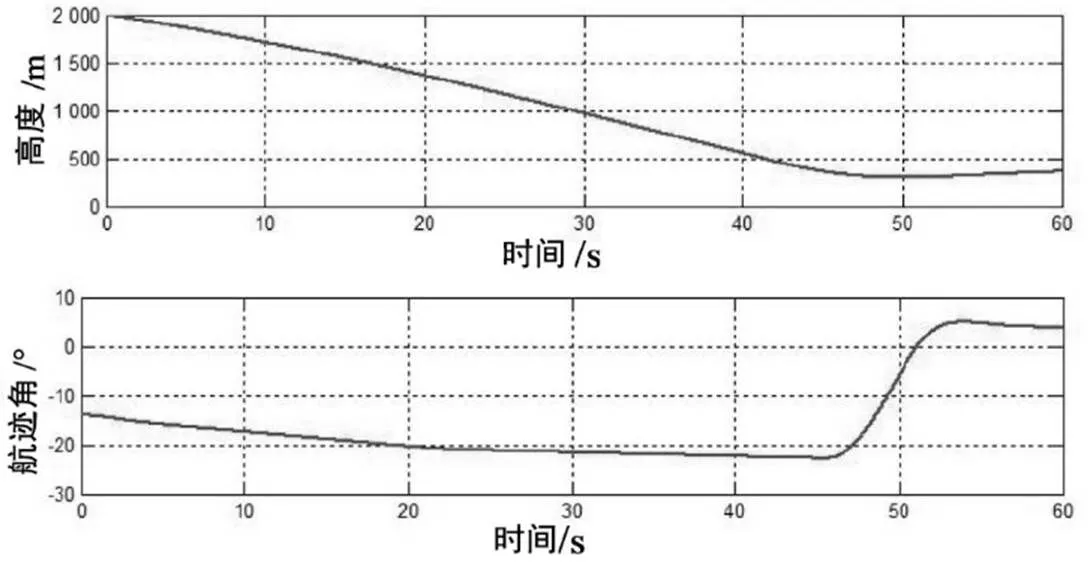
图4 滚转角为0的情况下危险高度拉起的响应结果
从图4可以看出,飞机在飞行过程中的高度的最低点为305.4 m,在预定的危险高度300 m之上,在时间大约为52 s时,飞机的航迹角由负值变为正值。这说明飞机在接近危险高度时被自动拉起,并且拉起的效果良好,符合预期的要求。
飞机的滚转角不等于0的情况:假设飞机的初始状态为高度=2 000 m、航迹角=﹣14°、速度=105 m/s、滚转角=﹣15°,则其仿真结果如图5所示。
从图5可以看出,在飞行时间大约为28 s时,飞机先进行横向改平的操纵动作,飞行大约45 s时进行拉起,飞行过程的飞机的最低高度为304.6 m。
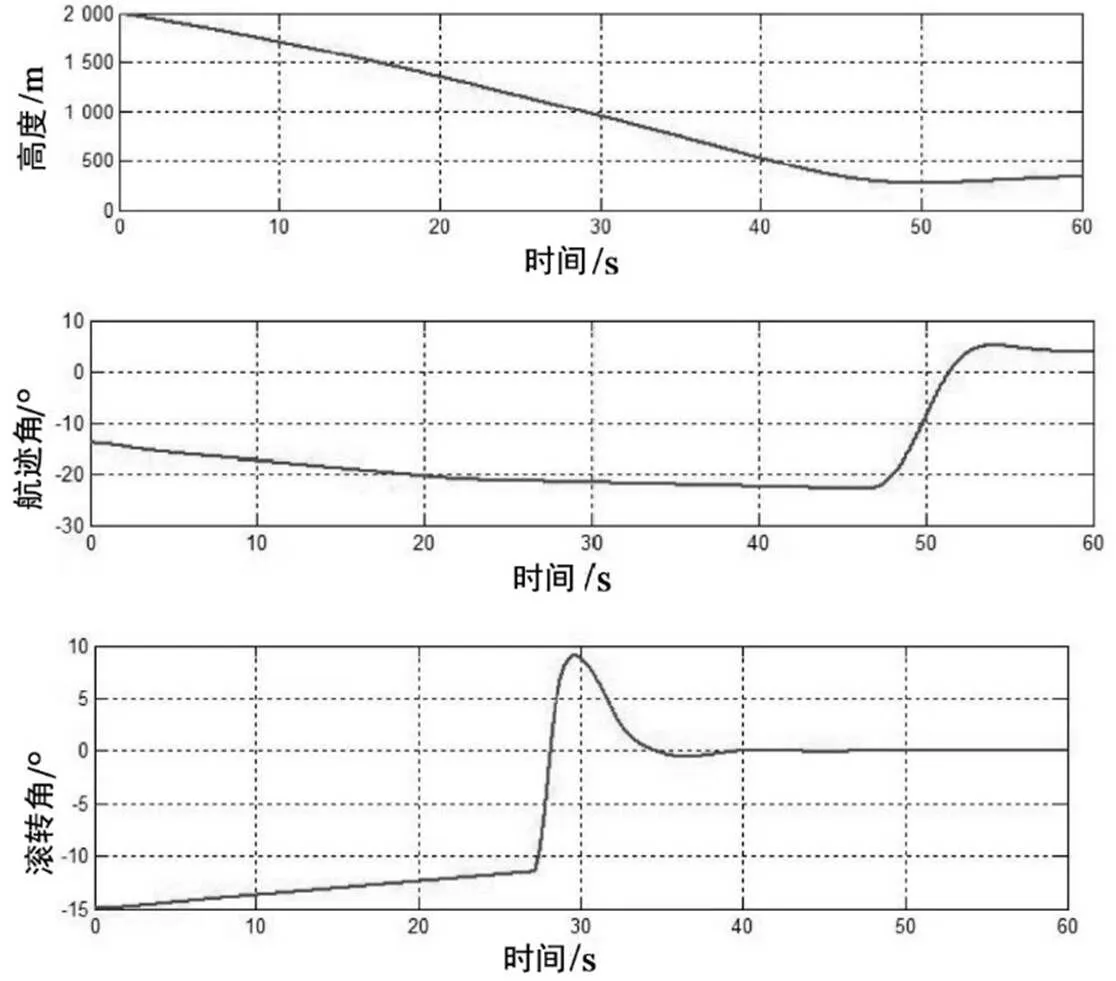
图5 滚转角不等于0的情况下危险高度拉起的响应结果
综上所述,本文提出了飞机危险高度拉起的触发条件,利用X型飞机的非线性六自由度模型,通过仿真滚转角为零和不为0的两种情况下危险高度拉起的实际效果表明,依据本文提出的危险高度拉起的触发条件,能够自动进行飞机的危险高度拉起,拉起的效果很好。
4.2 大侧风条件下安全增强驾驶控制律的仿真试验
假设飞机的初始状态为侧风wind=10 m/s、侧向偏差= 10 m、速度=78 m/s的环境下进近下滑,其横向状态量的仿真试验结果如图6所示。
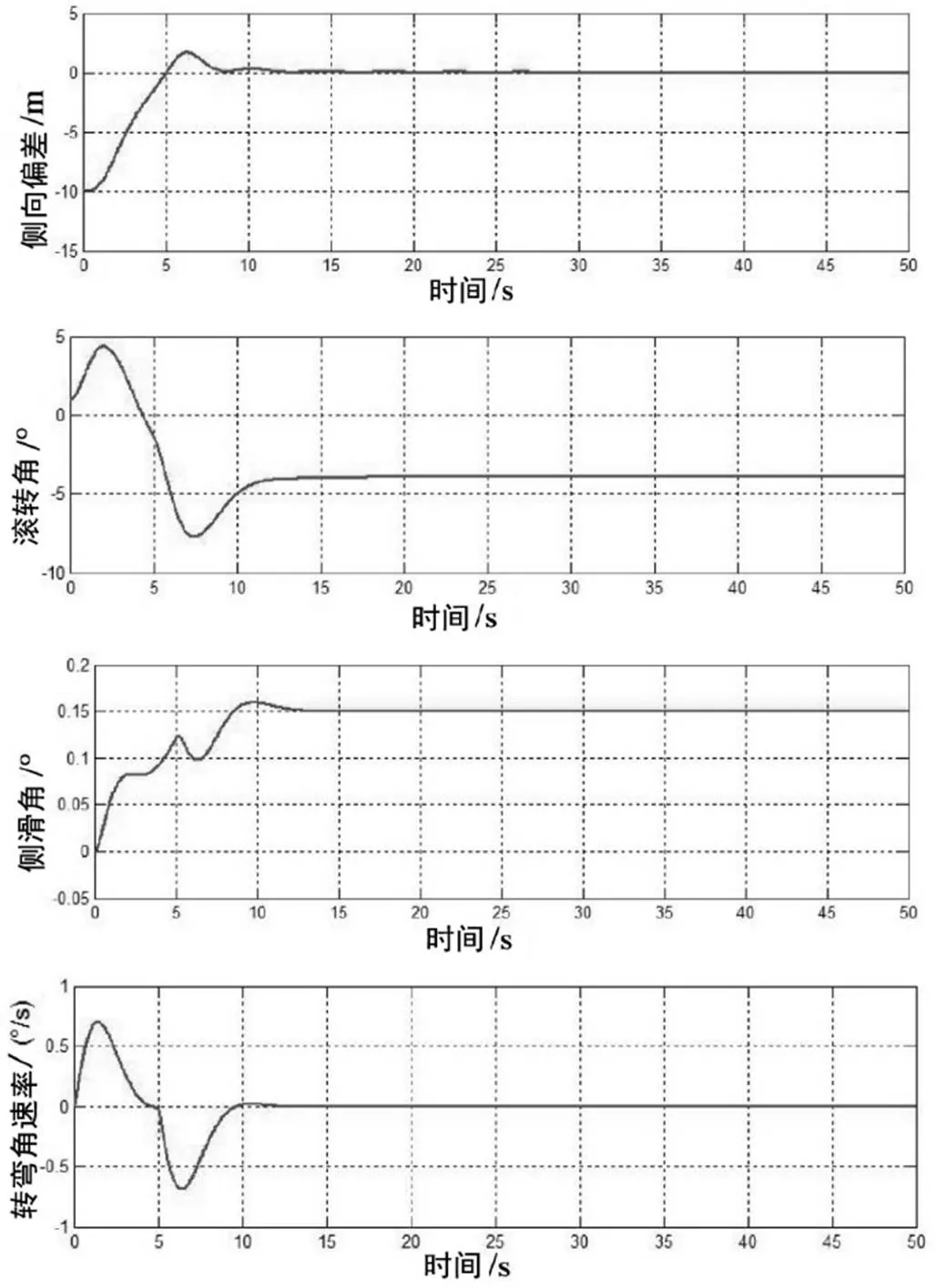
图6 10 m/s大侧风初始侧向偏差10 m时飞机横向状态量的响应曲线
由图6可以看出,飞机在10 m/s的大侧风条件下进近下滑的过程中,消除侧向偏差具有较好的动态以及稳态响应,消除侧向位移的响应时间约为12 s,超调量小于20%且无稳态误差。
假设飞机的初始状态为侧风wind=20 m/s、侧向偏差=10 m、速度=78 m/s的环境下进近下滑,其横向状态量的仿真试验结果如图7所示。
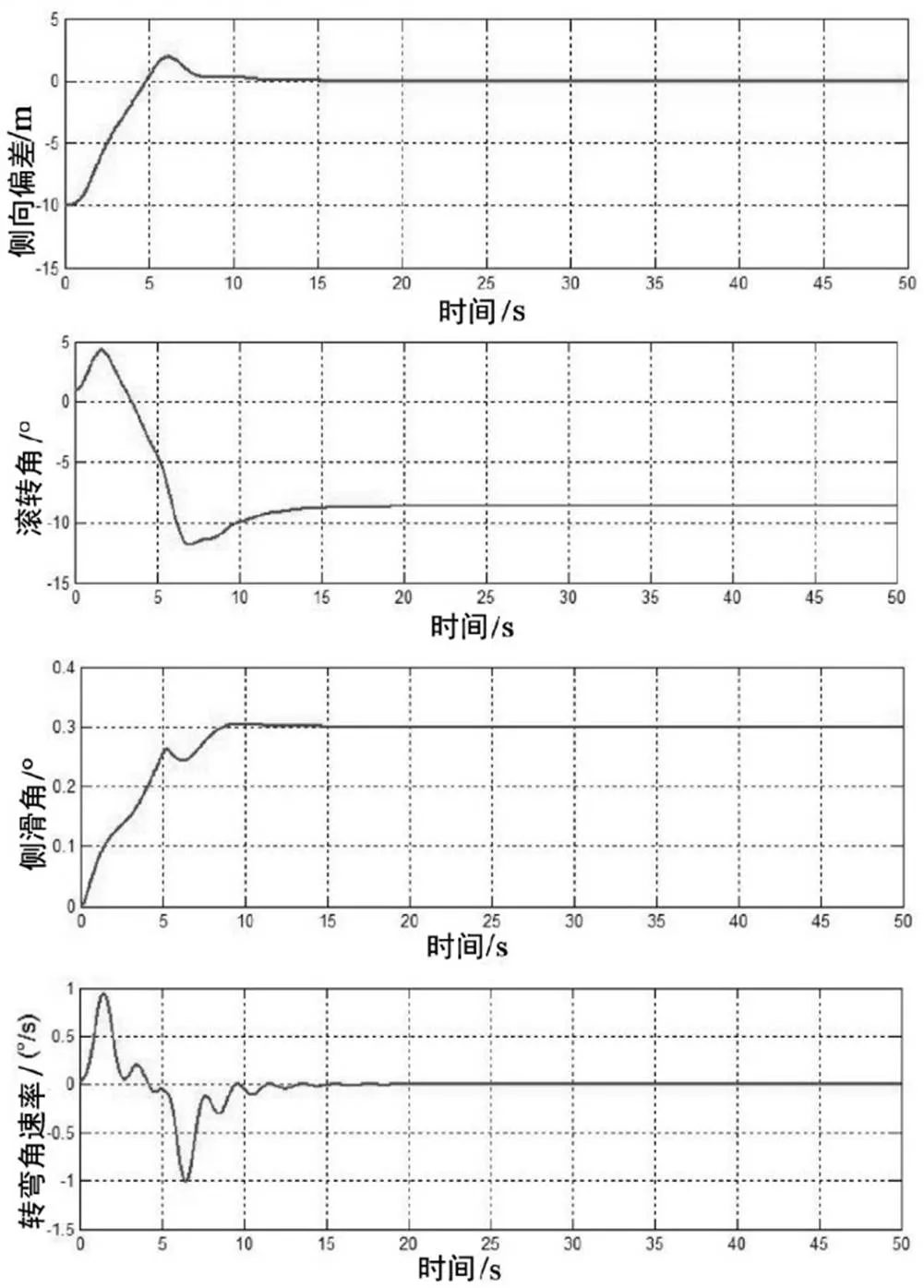
图7 20 m/s大侧风初始侧向偏差10 m时飞机横向状态量的响应曲线
由图7可以看出,飞机在20 m/s的大侧风条件下进近下滑的过程中,消除侧向偏差具有较好的动态以及稳态响应,消除侧向位移的响应时间约为16 s,超调量小于20%且无稳态误差。从图6、图7可以看出,飞机在下滑进近过程中,随着侧风的增大,安全增强控制系统消除侧向偏差的时间也随之变长,滚转角和侧滑角的稳态值也增加,稳态误差为0,超调量小于20%,可以迅速主动改出飞机的危险状态,顺利完成接下来的飞行任务。
5 结论
基于X型飞机的单机非线性六自由度的动力学模型,分别对所设计的危险高度拉起和大侧风中精密进近的安全增强控制律进行试验研究。研究结果表明,对于危险高度拉起的安全增强控制律而言,对危险高度进行了假设研究,飞机在触发拉起条件后,可以迅速改变航迹角,将飞机拉起至安全高度,虽然在滚装角不为0的情况下,拉起高度低于预定最低安全高度,但也在可以接受的范围内;对于大侧风条件下的精密进近安全增强控制律,在飞机进近下滑的过程中,随着侧风的增加,消除侧向偏差的调节时间与滚转角和侧滑角也随之增大,但依然可以较快地改出危险状态,符合预期的设计要求。
论文及数据已进行脱密处理。
[1]高浩.高等飞行动力学[M].北京:国防工业出版社,2004.
[2]蒋康博,蒙泽海,叶忱.自然风对飞机着陆的影响[J].飞行力学,2014(3):197-199.
[3]马大卫,聂宏,张明.民用飞机侧风影响下的纠偏研究[J].飞行力学,2013(1):5-9,23.
[4]张立彬.侧风起飞中几个问题的探讨[J].飞行力学,1999(1):1.
[5]KHAPANE P D.Simulation of asymemetric landing and typical ground maneuver for large transport aircraft[J].Aerospace Science and Technology,2003,7(8):611-619.
[6]KHAPANE P D.Gear walk instability studies using flexible multibody dynamics simulation methods in SMPACK[J].Aemspace Science and Technology,2006,10(7):19-25.
[7]FRUST S.Aircraft carrier turbulence study for predicting air flow dynamics with increasing WOD velocities [M].United State:Naval Air Engineering Centre,1968.
[8]吴森堂,费玉华.飞行控制系统[M].北京:北京航空航天大学出版社,2005.
[9]章卫国.现代飞行控制系统设计[M].西安:西北工业大学出版社,2009.
V241
A
10.15913/j.cnki.kjycx.2020.01.006
2095-6835(2020)01-0021-04
白荣强(1992—),男,主要研究方向为飞行品质试验研究。吴行(1992—),男,主要研究方向为飞行性能试验研究。
〔编辑:严丽琴〕
