基于几何力学的水面无人艇艇群控制技术
2020-01-14顾颖闽
况 阳,顾颖闽
(1.海军装备项目管理中心,北京 100071;2.中国船舶重工集团公司第七一六研究所,江苏 连云港 222006)
0 引 言
人类武器装备发展经历了冷兵器、热兵器、机械化、信息化4 个阶段。当前世界正处于新一轮科技革命与产业变革中。人工智能技术、无人技术、新材料技术、生物技术和信息技术等交叉融合,无人化、智能化的装备技术井喷式发展,武器装备正逐步向智能化阶段发展。无人装备作为“机械化、信息化、智能化”融合一体的颠覆性新型装备,具有作战使用灵活、综合作战效益高、适用于危险环境、人员伤亡率低、全寿命费用低等显著特点,被广泛应用在军事领域。
未来随着无人装备性能持续提升且大量列装,无人作战力量也将随之快速增长,作战应用的范围与深度不断拓展,对传统的对抗形态、作战方式、战术战法和作战理论带来了一系列影响。对抗形态呈现出由对抗重心转智能较量、对抗规模趋于小型可控、对抗空间拓入全域多维等特点;作战方式出现“人机一体”的联合模式、“无人先导”的进攻模式、“持续打击”的作战形式等多种变革;战术战法显现出“干扰阻断、反制捕获”的控制战、“混搭编组、整体协同”的集群战;作战理论催生了“母舰理论”、“蜂群理论”、“遥控作战”、“前沿发动”等新无人作战理论,作战运用“集群化”,在单元层级上形成自主化的作战集群与编队,人机协同作战和自主对抗的“智能化战争”成为可能。
当前,水面无人艇以中小型规模并配合有人舰艇作战行动为主,为弥补中小型水面无人艇存在单艇载荷配置有限、任务能力偏弱、作战样式相对单一等不足,为适应多样的作战任务,应对复杂多变的海洋环境,水面无人艇通常以艇群方式或与有人舰艇协同方式进行作战,通过多艇联合,能力互补,弥补单艇在高度动态的水域中的能力不足,充分发挥水面无人艇艇群灵活部署快、监控范围广、作战组织灵活、抗毁重构性强等优势。实现更高的作业效率和作业范围,加强协同鲁棒性和通信能力,适应混合兵种、多种装备和配合协调方面的需求,具备独立完成复杂任务的能力。
1 美国水面无人艇艇群控制技术发展现状
目前,世界上主要水面无人艇装备研制国家都在开展水面无人艇集群的研究,但目前只有美国具备军事行动验证的演示能力。近年来,美国海军研究署牵头成功完成了2 次海上试验验证。2014 年8 月,美国海军研究署将13 艘水面无人艇组成编队,利用“分散与自动数据融合系统”(简称DADFS)和“机器人智能感知系统控制体系架构”(简称CARACaS)两款软件实现单艇接收任务指令后自主行为决策,成功发现模拟敌船并拦截。但本次试验中水面无人艇目标识别、护航、拦截等任务仍需人工指令,水面无人艇群仅实现了半自主协同作战。
DADFS 和CARACaS 两款软件是水面无人艇群实现信息共享、自主任务协调与分配的关键。
CARACaS 是美国海军2004 年结合美国国家航空航天局对火星探测器的研发成果开始研发的,具备高速避障及探测、多无人艇合作、探测数据融合和交互、艇上任务规划等功能,由行为系统、动态计划系统、感知系统3 部分构成,如图1 所示。行为系统基于R4SA(可靠实时可重构机器人软件架构软件)搭建,采用多智能体控制结构,利用多目标决策理论,实现多无人艇协同控制。动态计划系统基于CASPER(连续行为规划计划执行和再计划软件)搭建,可根据任务内容和水面无人艇当前状态,制定水面无人艇动态行为计划。感知系统则可绘制部署区域的环境感知图像,作为安全导航的依据,可进行威胁探测和态势感知,并将信息发送至实际模型中。
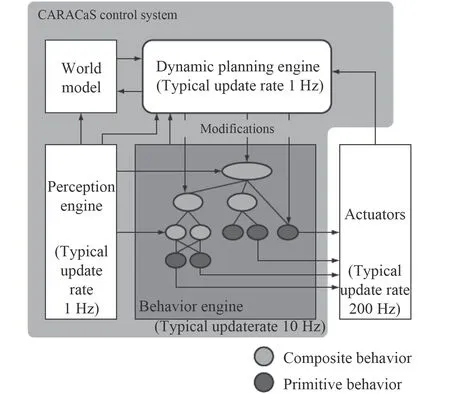
图 1 CARACaS 控制系统结构示意图Fig.1 Strcture diagram of “CARACaS” control system
DADFS 是实现多艇控制的关键因素,可同步各艇的状态感知数据,并利用各艇上关联的传感器数据创建统一的态势感知图像,实现多艇感知数据的交互与融合。
此后,海军研究署对CARACaS 进行改进,通过增加目标图像数据库和识别软件,使水面无人艇具备目标自主识别能力。利用多目标决策理论构建艇间行为协调机制,实现协同决策。
2016 年10 月,美国海军研究署再次开展水面无人艇集群试验,在16 nm2海域内,4 艘水面无人艇集群成功实现自主目标探测与识别、跟踪、巡逻,整个控制回路无需人工参与,首次真正实现了集群作战,如图2 所示。
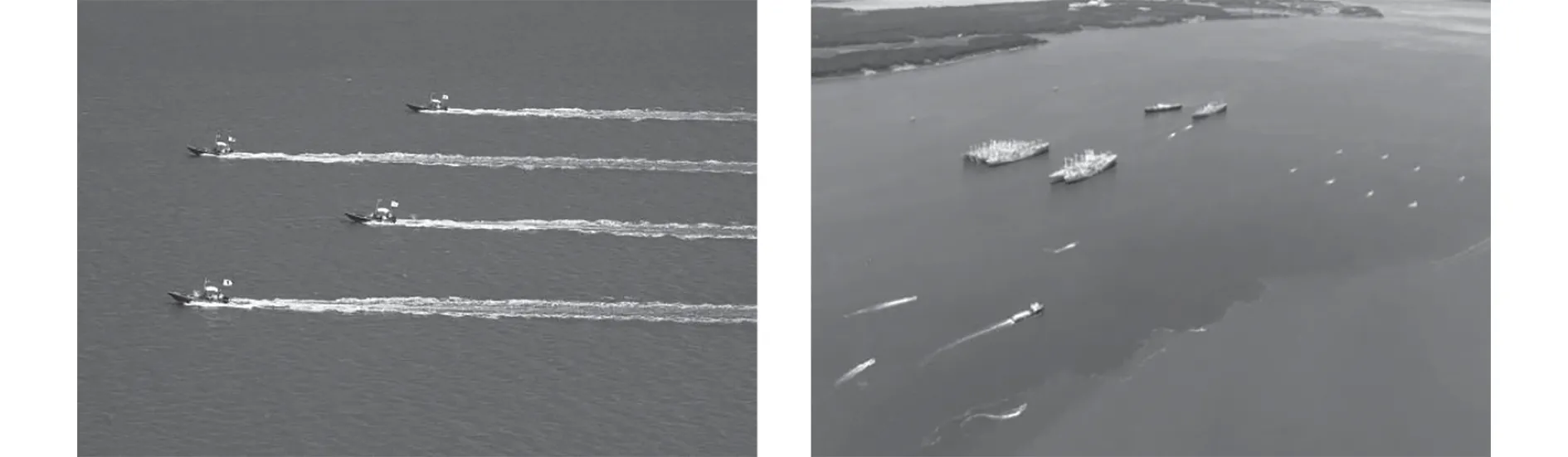
图 2 多水面无人艇“蜂群”战术Fig.2 Swarm tactics of multiple USV
2 基于几何力学的水面无人艇艇群控制总体架构与方法
2.1 水面无人艇艇群控制总体架构与方法需解决的问题
水面无人艇艇群内各平台的差异性较大,易受到通信能力、环境因素、无人平台及其载荷能力特征等方面因素制约,控制方式包括指挥中心集中控制、有中心的艇群自主协同和无中心的艇群自主协同等水面无人艇艇群多种协同控制方法,需要研究建立适应多种任务、环境、控制方法的水面无人艇艇群控制总体架构。
该架构重点需要解决以下几方面问题:1)因为总体架构是基础,不能随意替换,在框架模型选择上需要具有一定前瞻性,考虑支持节点数量不少于百艘。2)考虑水面无人艇艇群运行海洋环境、地理环境(障碍物)、通信环境、感知能力以及群内节点变化与扰动,使得集群控制必须能够应对各种不确定因素条件下既确保安全又行动一致的柔性控制。3)艇群控制系统空间坐标描述上,考虑因水面无人艇个体刚体运动变换快且扰动性大的特征,对控制精度与实时性带来较高要求,为解决大数量多自由度运动个体在空间实时坐标转换所带来的控制系统模型设计复杂问题,将控制系统解算坐标系建立在刚体运动坐标系,尽可能避免坐标转换。4)开放性问题,在框架设计中,既尽可能不额外增加单艇软硬件需求成本,又能够支持未来协同组织、任务规划、队形控制等不同先进算法模型的集成。5)具备节点随遇接入/退出的节点随机余度控制。6)充分考虑无线网络通信时延及不稳定等条件下,艇群安全性控制。
2.2 基于几何力学的水面无人艇艇群控制总体架构技术优势
针对架构需要解决的几方面问题,本文采用基于几何力学框架与最优控制的方法为模型基础构建水面无人艇艇群总体架构。由于几何力学框架在非线性系统控制中具有无坐标选取的奇异性、可利用对称性进行约化降维等优势,由其构造的离散空间中的最优化问题能有效替代最优控制的数值解,有效降低复杂刚体运动系统维度,解决了面向多节点、复杂不确定干扰环境的水面无人艇艇群复杂非线性系统控制问题,为支持未来大批数、异构水面无人艇艇群协同控制奠定基础。目前,美国已经在加州海域完成了基于该技术的水面无人艇群试验验证。
2.3 技术实现研究方法概述
2.3.1 水面无人艇艇群控制总体架构
构建基于几何力学的水面无人艇艇群控制总体架构,主要方法如下:1)通过障碍物几何化技术,将不规则障碍物描述成规则图形。2)开展艇群整体拓扑结构研究,为减少通信容量限制,将艇群分解成若干较小的群簇,群簇内节点相互通信,每个簇选择一个节点作为簇头,艇群内簇头与簇头相关通信(拓扑结构图如图3 所示),通过有向图构建网络拓扑结构动力学方程描述群内各节点的相关关系、通信关系以及内部安全机制等各种约束条件,形成艇群内部固有约束属性。约束属性可通过人工设置、数据库和智能学习的方式获取。3)通过有向图的方式,描述各水面无人艇自身的姿态与位置,以及各节点间相对位置姿态,并定义集群相关数据存储结构,并通过预先设置虚拟点的方式,完成节点随机余度控制。从而为水面无人艇艇群构建刚体运动坐标体系数据,并有效支持外部信息输入,实现各单艇控制模块、艇群任务决策模块与艇群总体框架的数据访问接入。4)按照艇群几何中心、通信能力、艇群感知能力等因素进行综合角色决策分配,选择各个群头。5)利用几何力学Hamel 框架,将水面无人艇看成刚体,利用变分公式和Hamilton原理,建立水面无人艇单艇Hamel 运动方程,在模型中除考虑自身动力以外,还需要综合叠加考虑风、浪、流等方面环境影响力,并完善建立风、浪、流等环境影响力模型。6)利用几何力学Hamel 框架,根据水面无人艇艇群网络拓扑结构动力学方程和艇群相关数据存储结构,结合单个体水面无人艇运动模型,利用基于改进人工势场方法,构造整个水面无人艇艇群运动模型,通过艇群网络拓扑结构、相对位置约束关系以及单艇运动模型形成水面无人艇艇群内各节点的动能和势能函数。
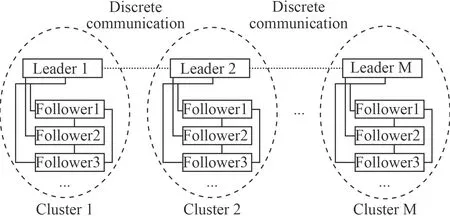
图 3 水面无人艇艇群拓扑结构图Fig.3 Topological diagram of USV group
2.3.2 水面无人艇艇群路径规划技术
采用离散力学与最优控制(DMOC)路径规划方法,在力学模型上利用离散变分原理得到易于计算的数值格式,用来规划水面无人艇艇群的长时间高精度的最优路径。区别于传统方法之处在于通过离散变分原理直接得到离散方程,再将相应的目标泛函离散,从而得到以离散方程为约束的非线性规划问题,并用序列二次规划(SQP)方法求解,这样就可以用较小的计算代价来精确确定最优控制和最优轨迹。
基于DMOC 方法的水面无人艇艇群路径规划的本质就是带约束离散的非线性最优控制问题,即价值泛函最小并满足边界、运动等约束条件。局部动态规划主要表现为艇群位姿关系的变化,无空间坐标变换。全局艇群规划与局部艇群规划之间关系为全局艇群规划需要局部调整时启动局部动态规划。在艇群动态规划在现有边界、运动等约束条件范围能够实现位姿的调整,则只需要局部调整艇群的位姿关系,否则需重新全局规划,再完成艇群的位姿控制。具体算法流程如图4 所示。
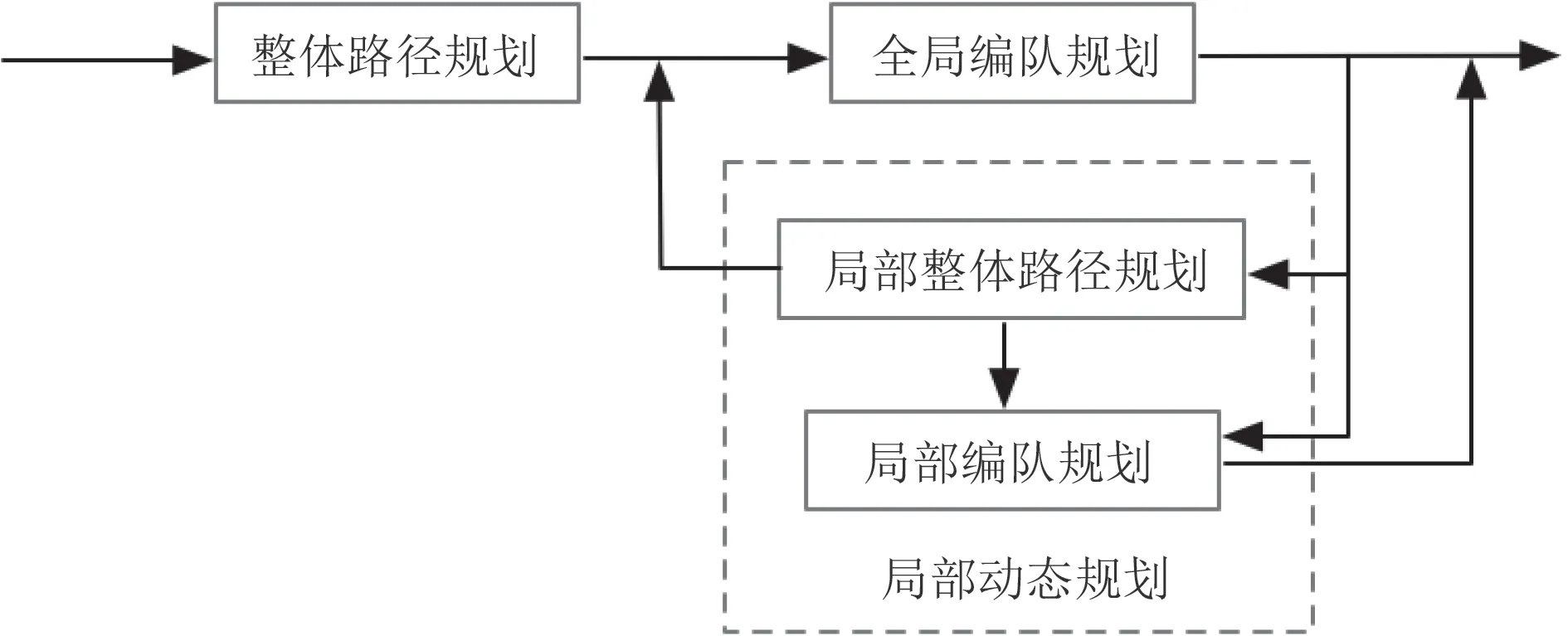
图 4 水面无人艇艇群路径规划算法流程图Fig.4 Flow chart of path planning algorithm for USV group
2.3.3 水面无人艇艇群协同控制
水面无人艇艇群协同控制包括单个体轨迹控制,编队保持控制和避障避撞控制的方法。艇群协同控制框架如图5 所示。
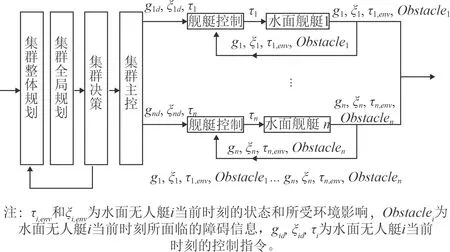
图 5 水面无人艇群协同控制框架示意图Fig.5 Schematic diagram of cooperative control framework of USV group
1)轨迹控制
轨迹控制是指通过对艇群中个体施加控制力及控制力矩,将个体从偏离的轨迹拉回到已经规划好的路径轨迹的过程。主要根据水面无人艇当前实际位姿与目标位姿的误差,与其对应的误差速度,形成纠偏干扰力,对水面无人艇在单艇自身航行控制力影响,当偏差量超过一定范围,偏差量越大,干扰力越大。
2)队形保持控制
在水面无人艇艇群控制总体架构中相应内部势场力控制机制对水面无人艇艇群的有效控制,具备高精度的队形保持控制能力,无需额外处理。针对通信时延的控制问题采用滑窗控制机制,即一次发送一段(多组)轨迹控制点,根据通信更新频率动态更新。
3)避障避撞控制
与水面无人艇群避障避撞控制思路相似,均为超过一定阈值范围,通过对水面无人艇施加回转力进行控制,只是力的控制系统不同,总体思路与单艇避障与避撞思路相似,在策略上通过对障碍物与艇群内各艇相对姿态决策各群簇内各艇威胁程度,将威胁度动态分配簇头,内部通过势场力对艇群有效控制,实现艇群整体避障。为了提高大规模艇群避障效率,通过对分簇簇头进行避障规划,实现高效避障能力。针对复杂情况下的避障和避碰问题,采用艇群重构模式,重新调整分簇实现。
3 结 语
本文提出水面无人艇艇群系统未来发展需求,分析基于几何力学的水面无人艇艇群控制总体架构与方法,为水面无人艇艇群协同控制技术研究提出一种新的思路,对相关技术研究和发展具有一定借鉴和参考意义。
