多航态高速无人艇阻力试验研究
2020-01-14罗富强高霄鹏申云磊
罗富强,霍 聪,高霄鹏,申云磊
(海军工程大学 舰船与海洋学院,湖北 武汉 430033)
0 引 言
海上无人作战系统作为未来海上作战的重要力量,可以突破人员因素的限制,在恶劣海况下完成战场侦察、预警巡逻、抵近破坏和反潜跟踪等多种任务[1]。但要真正将无人新型作战力量的威力发挥出来,不仅要突破智能控制与感知等技术,还要求平台自身拥有独具特色的综合航行性能。 “多航态高速无人艇”是一种集潜艇、高速滑行艇、穿浪艇等多种艇型优点于一身的新概念艇型,同时具备水上中高速、水面半潜和水下潜航能力,并能够在各航态之间连续快速变换。其独特的多航态航行功能及高隐蔽、高航速特性,可更好地满足海上突防、无人作战、特种作战等海上任务。
世界上最先由瑞典对多航态概念艇型进行研究,1999 年开发了一种通过自主排注压载水切换吃水航态的水面艇“海豚”号,但其变换航态的目的主要是便于海上救援,并没有水下航行能力[2]。近些年来,美、英等国已成功研制出同时具备水面、水下航态自主航行能力的样艇,并逐步开展实际应用。几种典型样机方案涵盖了半潜式艇型、水面快艇与潜艇的结合艇型、采用变体设计的无人机构型[3]。其中美国SCUBACRAFT 公司的SCUBACRAFT 快艇采用双体艇艇型,水面高速滑行速度可达45 kn;洛·马公司提出一种采用升降变体技术的概念方案CHARC,通过主体和潜体连接构型的变换和调整压载设计实现5 种航态模式的转换[4]。
国内对于多航态艇型的研究报道较少,目前还处于概念设计、原理研究和模型试验的阶段。董文才[5]提出压载流道自由变深技术,其通过模型试验研究了压载流道开启、压载水自由流动对阻力性能的影响。霍聪[6]通过自航模试验验证了半潜-水面航态连续变换的可行性,并用数值模拟方法研究了中低速时的自航运动特性以及艇体内外的流动现象[7]。王伟[3]通过数值计算和水池试验对某多航态船型航态变换过程的阻力性能和姿态变化进行了研究分析,得出的结论是航态转换需要在特定的纵倾角和速度条件下才能实现。
以上研究侧重于水下-水面航态转换分析,而对于多航态船型本身的水动力性能没有进行全面研究。多航态高速无人艇从水面状态到半潜状态吃水变化范围很大,速度范围包含排水航行、半排水航行、全滑行等多个状态,艇体周围的水动力特性必然也会有较大的变化。对于新船型的设计,阻力性能是评价其总体性能的首要依据。本文通过在半潜状态到水面状态范围内变换吃水进行静水模型拖曳试验,分析某型多航态高速无人艇在不同吃水、不同速度下的水动力特征,探究不同吃水对该船型阻力性能和航行姿态的影响,为多航态高速艇的设计提供参考依据。
1 试验模型及方案
1.1 试验模型
试验采用一条木质模型,舷侧采用内倾船型设计,首部为穿浪型首,底部滑行面主要参考深V 滑行艇线型,尾部采用方尾。模型三维外形如图1 所示,船型主要特征参数如表1 所示(型深D 为基线到甲板最高点处)。
试验在中国航空工业第605 研究所高速拖曳水池中进行,测试仪器设备包括:测力传感器、倾角传感器、拉线式位移传感器、照相机、摄像机等。测力传感器的精度为0.01 kg,倾角传感器的精度为0.01°,位移传感器的精度为0.01 m。试验由2 个导航杆和拖曳杆组成,导航杆限制艇的横向运动,试验装置安装如图2 所示。
1.2 试验方案
试验设置一系列吃水工况,探究多航态高速艇模型在不同吃水航态下的阻力性能和航行姿态。试验选取6 个不同的吃水工况,吃水变化范围为0.22D~0.59D(吃水最小工况的排水量为Δ1,最大吃水工况对应排水量为4.32Δ1)。试验速度从1 m/s 逐渐增大,直至模型出现海豚运动、埋首或者倾角过大等危险工况,结束该吃水工况。
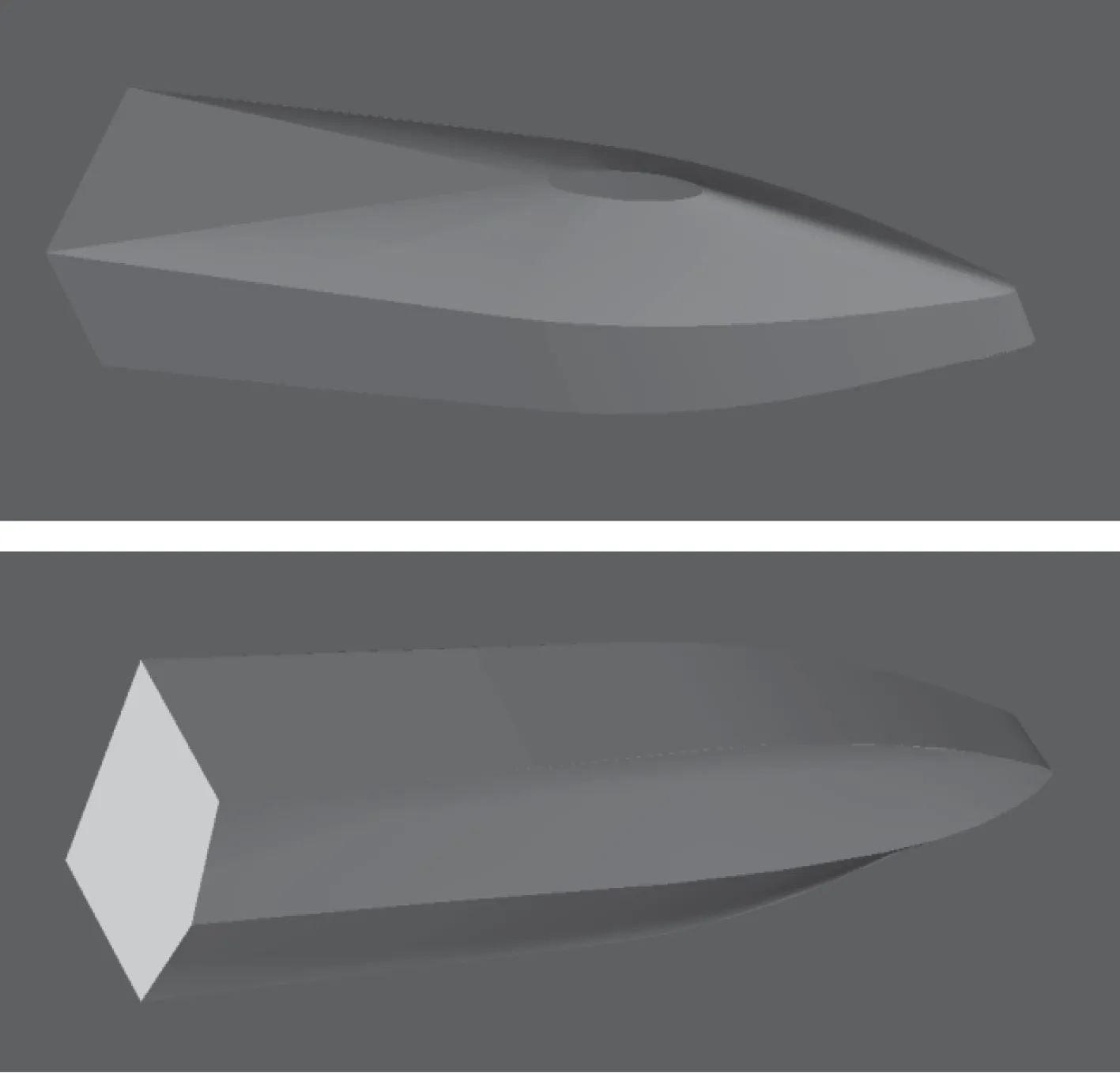
图 1 三维模型Fig.1 Three-dimensional model

表 1 模型主要特征参数Tab.1 Primary ship parameters of the test model

图 2 试验模型和试验装置Fig.2 Test model and experimental equipment
试验测量记录的参数有:首尾吃水、水温、拖车速度、阻力、船中升沉变化、纵倾变化值。另外通过录像回放观察船体周围的兴波和飞溅现象,并记录不同工况、不同速度点下的模型折角线浸湿长度、龙骨浸湿长度、艉侧浸湿高度等参数。
为了避免中高速航行状态模型首部出现飞溅、抨击等不利现象,试验在首部加装防溅条以减小首部兴波,保证模型能顺利起滑。图3 为各个吃水状态的水线示意简图,图4 为首部防溅条安装示意图,表2 为不同吃水的试验方案。
2 试验结果及分析
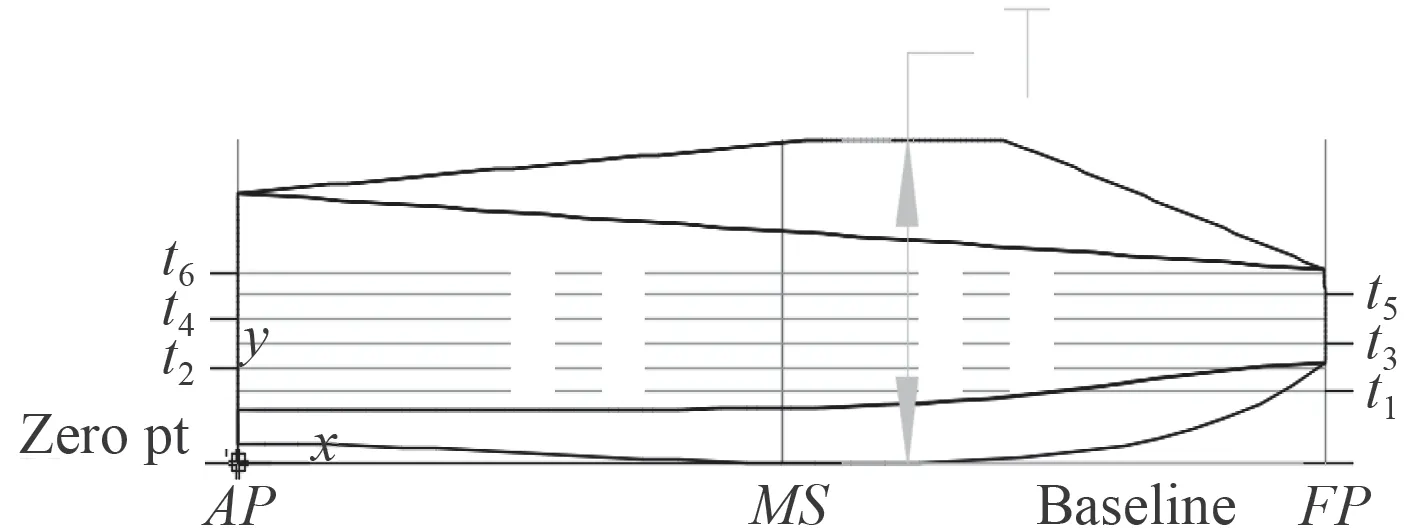
图 3 水线变化范围示意图Fig.3 Sketch of the range of varying water

图 4 防溅条安装位置Fig.4 Location of the spray strips
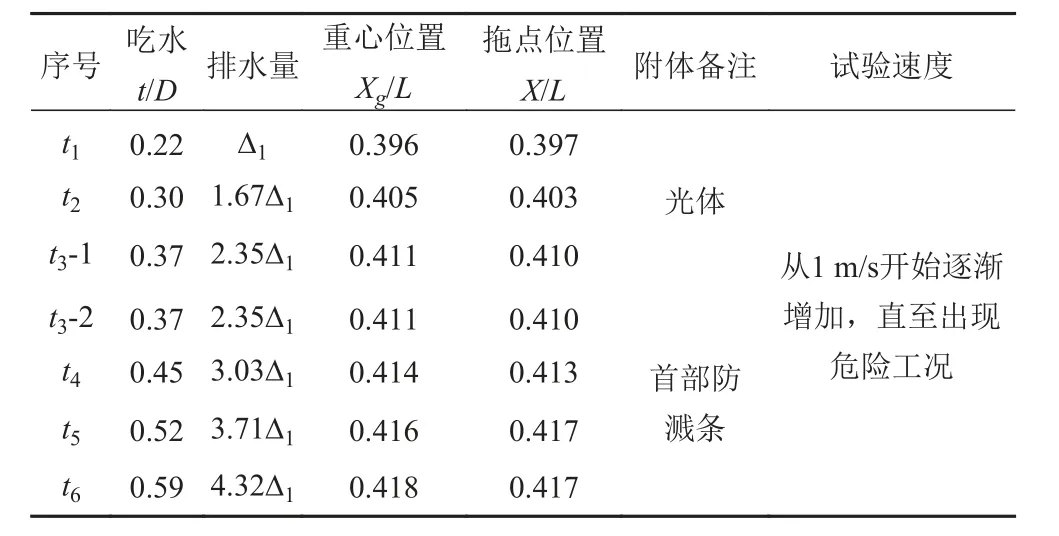
表 2 变吃水试验方案Tab.2 Experimental scheme of varying draft conditions
滑行艇在高速滑行时产生的须状飞溅会增加艇体湿面积,导致摩擦阻力的增加。如图5 所示,横向斜升滑行面在高速滑行时的浸湿面积可以分为2 部分[8],附加喷溅区投影面积OEF 和滑行面湿面积投影为OE 线后梯形面积;其中O 点为龙骨与静水面交点,E 点为舭部与静水面交点,lc,lk分别为折角线浸湿长度和龙骨浸湿长度。
本文根据试验现象视频回放分析,对不同航态下模型的浸湿面积SW采用不同处理方法:当船体处于排水状态时(Fr∇<1),SW取Maxsurf 软件Hydrostatics 模块计算的Wetted Area 值;当船体处于中高速航行状态时,SW采用近似估算法分块计算,分别计算艇体湿面积Sβ和须状飞溅浸湿面积Ssp[9]。具体计算公式参考文献[10]。
2.1 不同吃水下的航行特征分析
图6 为试验模型在不同吃水状态下所开展的速度工况点。如图7 和图8 所示,通过分析试验过程航行姿态变化特点,把模型航态划分为排水航行状态、半滑行状态、滑行状态。将不同吃水状态对应的航态划分速度点近似连成直线,得到吃水与临界速度的关系。随着吃水的增加,模型进入半滑行状态、滑行状态对应的临界航速点会稍微提前。
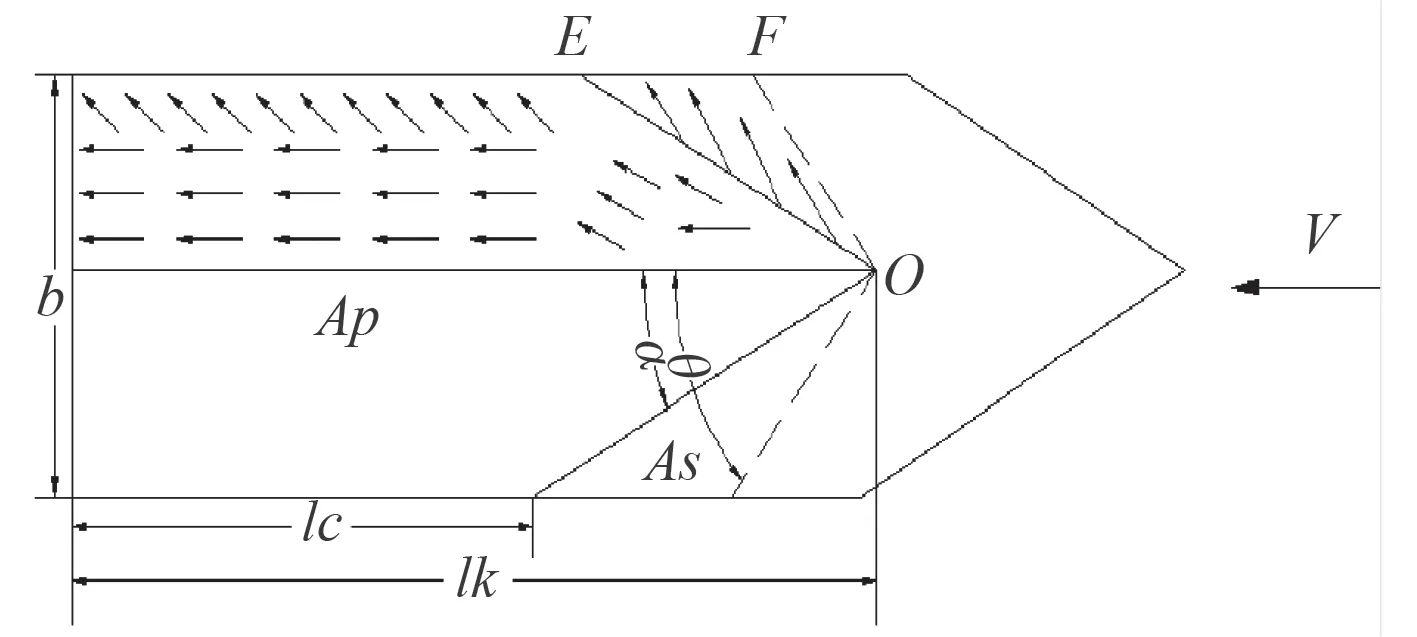
图 5 喷溅湿面积分布图Fig.5 Plan of spray wet areas
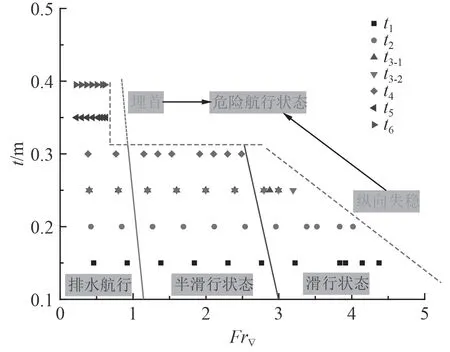
图 6 临界速度随模型吃水的变化Fig.6 Changes of critical speed in different draft
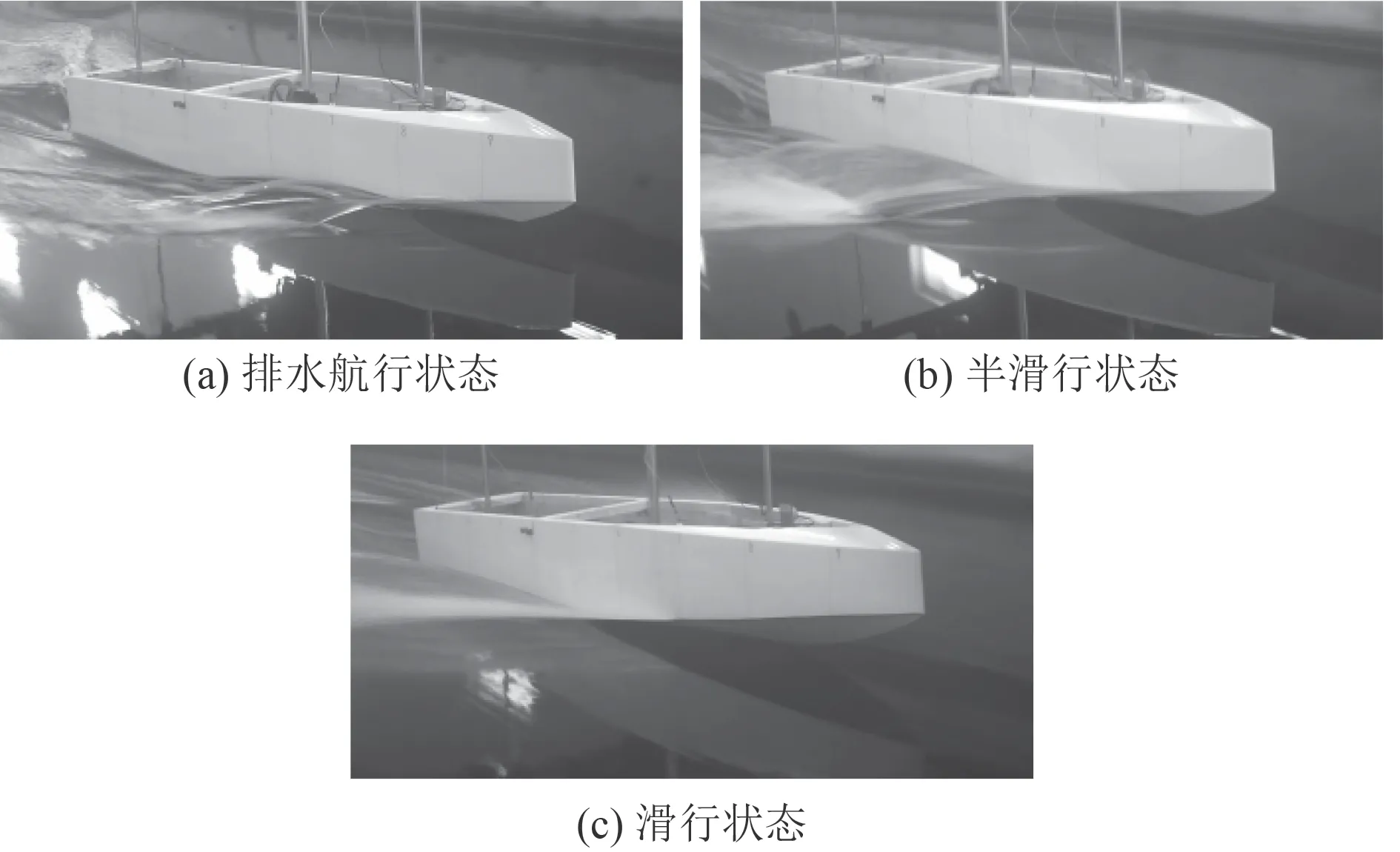
图 7 工况t1 的试验现象Fig.7 Test phenomenon of draft-t1
在t3和t4吃水工况,高速滑行时模型运动姿态较大,并且出现剧烈的飞溅现象,试验所进行的最高航速为偏安全航速。在吃水较大工况t5和t6,如图9所示Fr∇=0.6 左右时由于模型排水量较大并且出现埋首现象,模型未能顺利起滑,出于安全考虑将其定义为危险航行状态。
2.2 不同吃水下的航行姿态分析
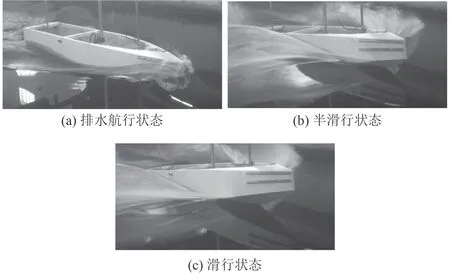
图 8 工况t3-2 的试验现象Fig.8 Test phenomenon of draft-t2

图 9 t5 和t6 工况埋首现象Fig.9 Test phenomenon of draft-t5 and draft-t6
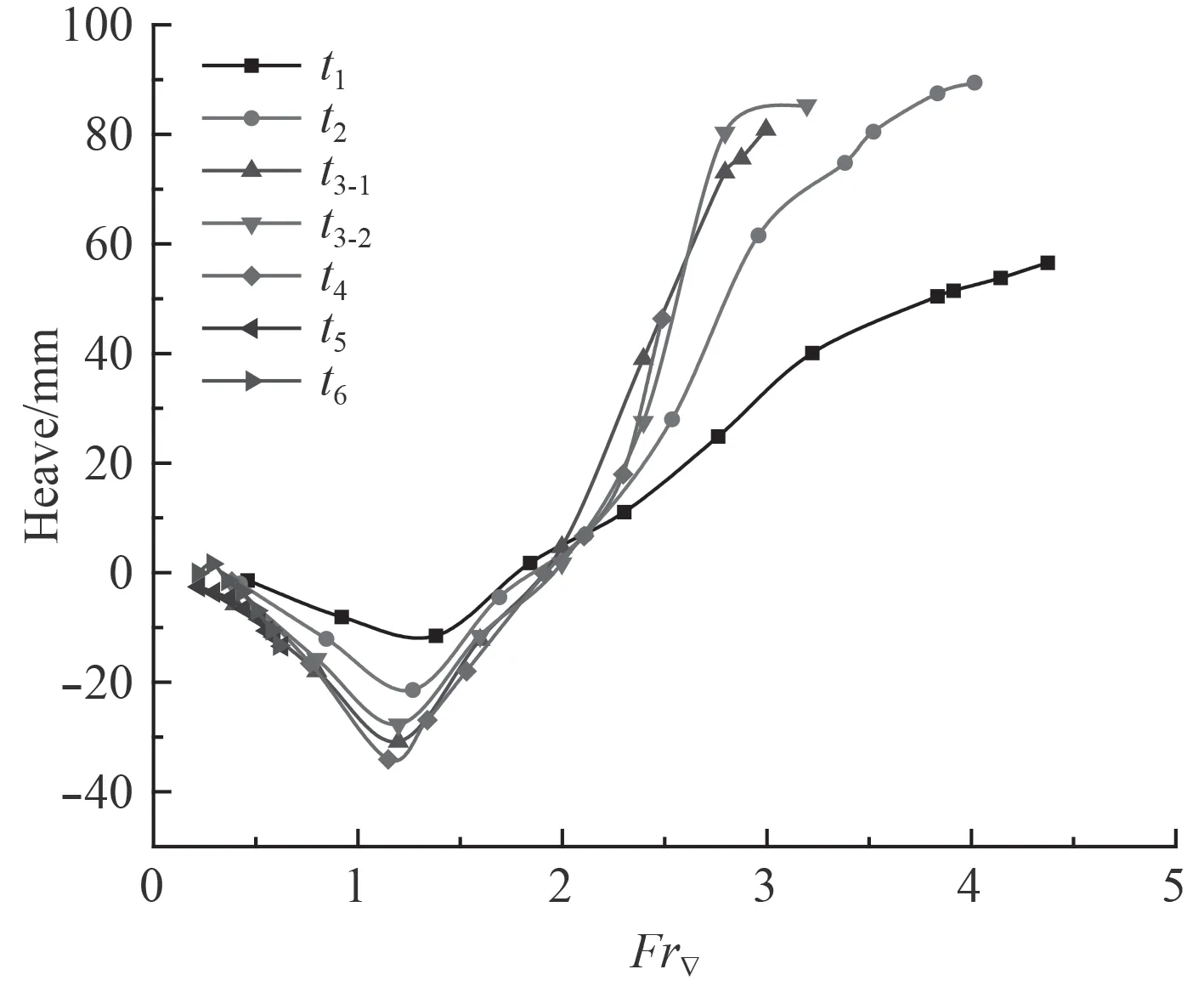
图 10 不同吃水工况下升沉值变化Fig.10 The change of sinkage in different draft
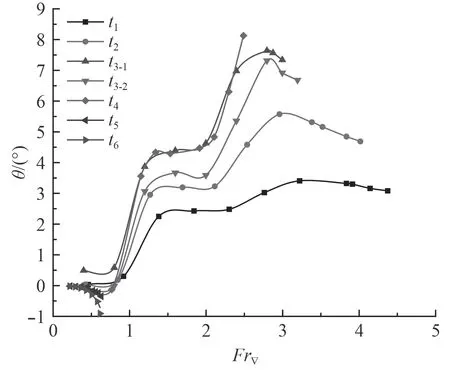
图 11 不同吃水工况下纵倾变化Fig.11 Trim angle of different draft
图10 和图11 为模型在不同吃水工况下的升沉和纵倾变化曲线,在Fr∇<2.0 时不同吃水下的模型运动姿态变化趋势基本一致,并且运动幅值随吃水的增加而变大;在Fr∇>2.5 时,随着吃水的增大,模型的升沉、纵倾角变化曲线便出现差异。在Fr∇=1.25 附近时,不同吃水工况的升沉曲线均出现拐点,升沉值开始随速度变大而增大;Fr∇>2.5 后,t1,t2工况的升沉增长趋势变缓,但t3,t4工况变缓的规律不明显。纵倾角变化曲线在多个速度点出现拐点,Fr∇在1.25~2.0 范围内纵倾角有一段平缓的过程;当Fr∇>3.0 后,纵倾角开始下降,随着吃水的变大,其下降拐点会提前、并且下降趋势更明显。
因此,在t1~t4吃水工况时,该模型航速范围涵盖从排水航行状态到滑行状态,保留了滑行艇的航行特征。但在吃水为t5和t6时,模型在排水航行阶段出现了较严重的埋首现象,未能顺利起滑。另外对比t3-1 和t3-2 的升沉、纵倾变化曲线,可知首部加装防溅条可以有效地减小模型运动幅值,减轻排水航行阶段的埋首现象,从而使得模型能够顺利起滑。
2.3 不同吃水下的湿面积
图12 为不同吃水工况下的模型湿面积SW化曲线,中低速时模型SW随着吃水的增加而明显增加,但在高速滑行状态Fr∇>3.0,由于艇体姿态基本一致,t1和t2吃水工况的SW大小也比较接近。另外在t3~t4工况,SW大小随Fr∇变化趋势基本一致,半滑行状态 Fr∇=1.7 左右时模型湿面积SW出现极小值,随着速度变大,当Fr∇>2.5 后SW呈现出不断下降的趋势。图中出现的曲线不光顺点,可能是由于计算公式作了近似化处理以及滑行艇滑行过程的强非线性特性造成的。
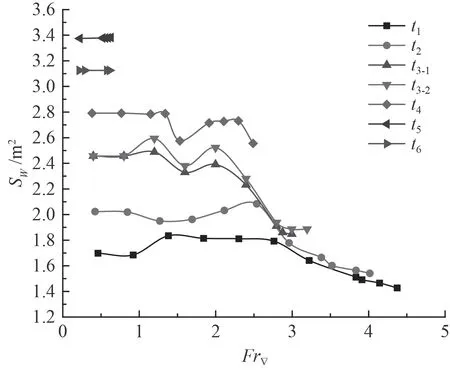
图 12 不同吃水工况下的湿面积变化Fig.12 Change of wetted area in different draft
分析可得,SW大小与模型的运动姿态紧密相关,艇体的整体抬升和尾倾都会使湿面积下降。结合运动姿态,t3和t4曲线在Fr∇=1.7 出现极小值的原因可能是此时模型的升沉和纵倾急剧变大,使得底部滑行面湿面积Sβ变小,而由须状飞溅引起的湿面积增加值Ssp还未能补偿底部湿面积的减小值。
2.4 不同吃水下的阻力性能分析
本文对阻力试验结果按标准无因次化处理,阻力转换成阻升比Rt/Δ,将总阻力Rt按二因次法分解成摩擦阻力Rf和剩余阻力Rr,摩擦阻力系数Cf按ITTC-57 公式,其中湿面积取前面近似计算所得结果。由此可计算得到无因次化的总阻力系数Ct、摩擦阻力系数Cf以及剩余阻力系数Cr。
1)阻力/排水量变化曲线分析
图13 为不同吃水工况下的阻升比Rt/Δ随体积傅汝德数Fr∇的试验结果,在中低航速段不同吃水状态下的Rt/Δ随速度的变化趋势基本一致,但在高速状态Fr∇>2.5 时阻力变化规律不明显。可以看到,工况t2~t4的阻力曲线在Fr∇=1.25,Fr∇=3.0 附近有拐点,说明阻力在航态转换速度点附近出现非线性变化。当Fr∇在1.25~2.0 范围时,阻力存在一段平缓增长区,与图11 纵倾角变化曲线的平缓段相对应;在高速滑行状态Fr∇>3.0 时,工况t2和t3的阻力/排水量随航速的增长趋势明显变缓。
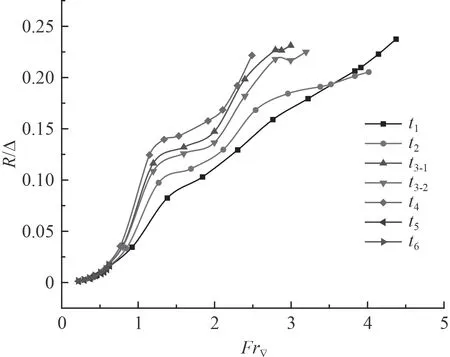
图 13 不同吃水工况下阻力变化Fig.13 Non-dimensional resistance of different draft
对比t3-1 和t3-2 阻力曲线,首部加装防溅条能使阻力性能变好,原因是首部防溅条有效地减轻了首部飞溅现象,减小了模型的能量耗散。整体而言,阻力性能与航行纵倾角密切相关,Rt/Δ随着吃水的增大而变大。其中出现的高速段t1和t2曲线交叉,可以结合运动姿态分析:在Fr∇>3.5 时工况t2的纵倾角为4°~5°,相比t1的3°滑行效率更高,因此t2拥有更好的阻力性能。
2)阻力成分变化分析
图14 为了模型在不同吃水工况下的剩余阻力Rr占总阻力的比例的变化曲线,吃水在t1~t4时Rr/Rt的比值随Fr∇增大的变化规律基本一致:随着吃水的增加,剩余阻力的份额也随之增加,说明总阻力中随吃水增加的主要成分是剩余阻力。在Fr∇=1.25 附近Rr/Rt出现峰值点,在工况t4时Rr/Rt甚至可达到90%,原因是在起滑阶段由湿面积引起的摩擦阻力急剧增大;Fr∇>1.25 后,Rr/Rt开始下降,但是随着吃水的增加其下降趋势变得缓和。图14 和图15 为不同吃水工况下的阻力系数变化曲线,在相同Fr∇下,随着吃水的增加剩余阻力系数Cr不断变大,而摩擦阻力系数Cf不断变小。在中低航速段不同吃水工况下剩余阻力系数Cr的变化规律一致,均呈现出先增大后减小的趋势,在Fr∇=1.25 左右时C r 曲线出现峰值点;当Fr∇>2.0 后,t3和t4的Cr开始变得平缓,而t1和t2的Cr仍保持不断下降的趋势。摩擦阻力系数Cf随着Fr∇的增大而不断下降,其原因是随着航速的增大雷诺数,Re也随之增大,而根据ITTC-57 公式Cf随雷诺数Re的增大而减小(本试验工况Re在106~107范围内)。另外,当Fr∇>2.0 时,Cf的下降趋势开始变得缓和。
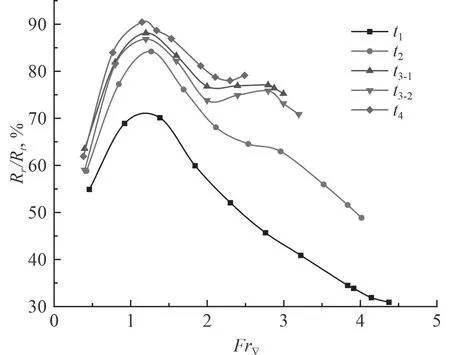
图 14 不同吃水工况下的剩余阻力与总阻力之比Fig.14 Ratio of residual drag to total drag in different draft
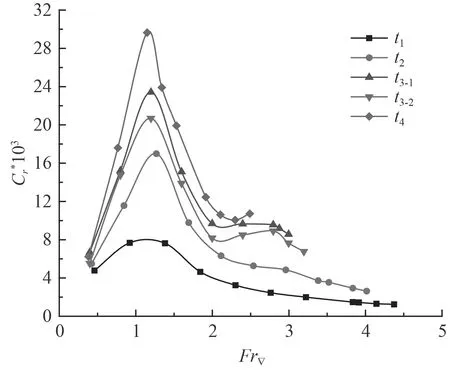
图 15 不同吃水工况下的剩余阻力系数Fig.15 Residual drag coefficient in different draft
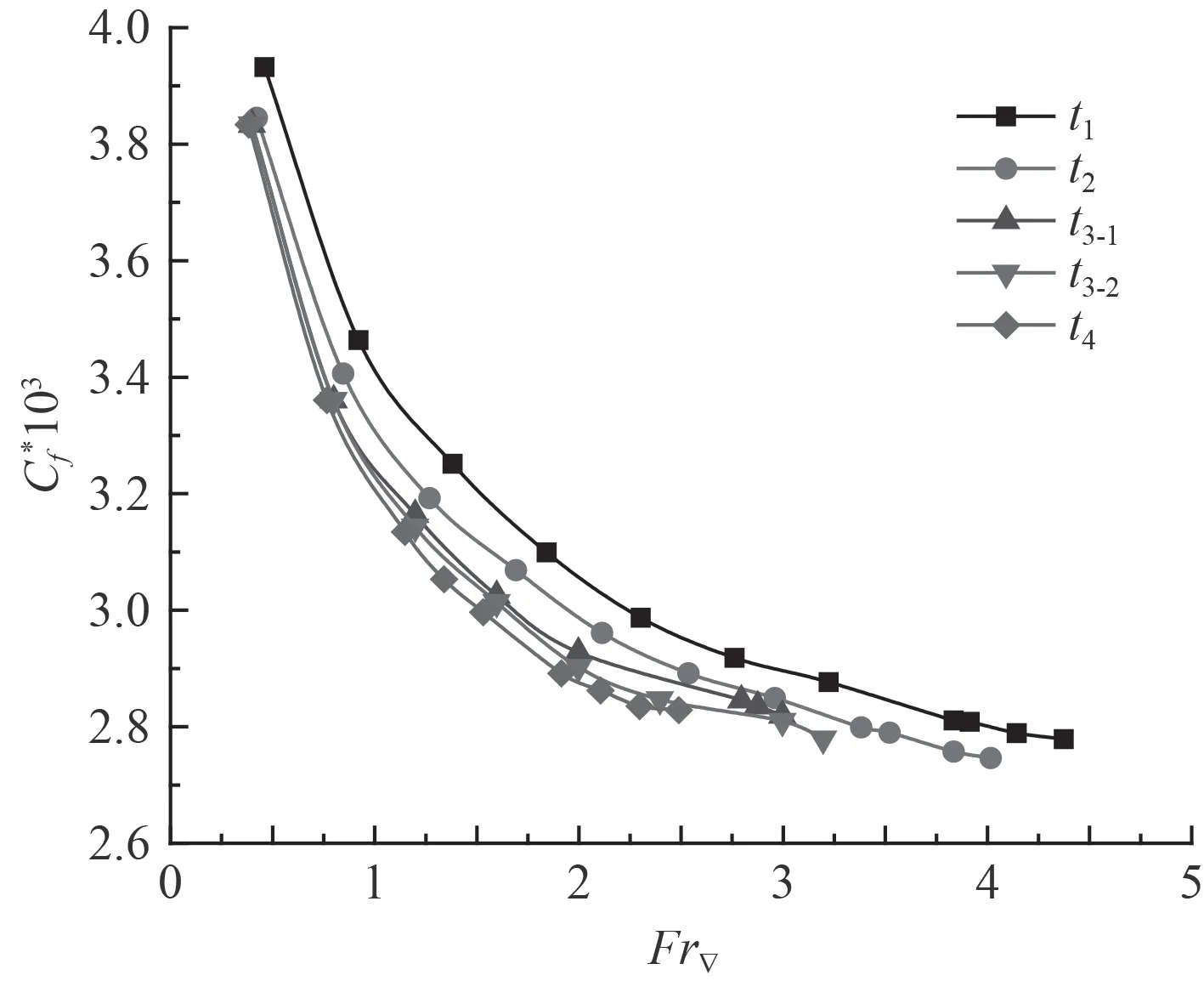
图 16 不同吃水工况下的摩擦阻力系数Fig.16 Frictional resistance coefficient in different dragft
根据图14~图16 的工况t3-1 和t3-2 曲线对比,发现首部加装防溅条主要减小了总阻力中的剩余阻力成分;在Fr∇<1.0 时,加装防溅条对Cr和Cf均影响不大,在中高速时,防溅条能使Cr和Cf均减小,并且对于Cr的影响明显更大。
3)与典型滑行艇静水阻力性能对比
“系列62”被认为是阻力性能较优良的一组滑行艇,为了评估该多航态模型的静水阻力性能,通过公开发表的文献[11],抓取其中Model 4667-1 Test No.7 的试验原始数据,与本试验几个吃水工况进行对比,结果如图17 和图18 所示。
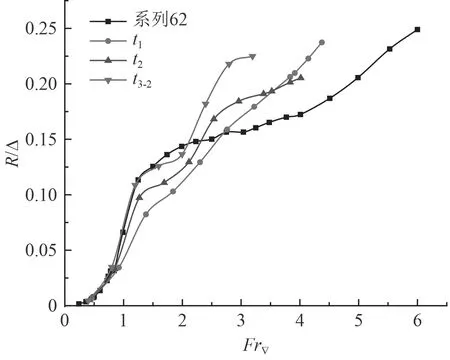
图 17 阻力性能对比Fig.17 Comparison of resistance performance
相比系列62 模型,Fr∇<2.5 时本试验模型在工况t1和t2的阻力性能更好,工况t3的阻力性能基本一致。但在Fr∇>2.5 后,系列62 模型的阻力性能比本试验模型各个吃水工况均更优。对比纵倾变化曲线,差异表现在中速航行状态本试验模型的3 个吃水工况均有一段倾角平缓段,而且本试验模型t2工况的纵倾角变化与系列62 模型最为接近。
3 结 语
本文通过对多航态高速无人艇在不同吃水工况进行模型试验,分析其静水阻力性能和运动特性,得到以下结论:
1)该多航态高速无人艇在吃水为t1~t4范围内均能加速到高速滑行状态,并且随着吃水的增加其进入滑行状态的速度点会稍微提前;在吃水大于t5时模型由于埋首未能顺利起滑,只能进行低速航行;在t1,t2吃水状态模型具有较好的阻力性能以及良好的运动姿态。
2)随着吃水的增加,高速滑行状态由须状喷溅引起的模型浸湿面积增加值也变大;模型总浸湿面积SW与模型的运动姿态紧密相关,在中低速时SW随吃水的增加而增加,但在高速滑行(Fr∇>3.0)时SW受吃水因素的影响较小。
3)在中低速(Fr∇<2.0)状态,模型在不同吃水下的运动姿态、阻力性能变化趋势基本一致,但在高速滑行状态其变化规律表现出差异。Fr∇在1.25~2.0 范围内,各吃水工况下的纵倾值均有一段平缓变化的过程。
4)随着吃水的增加,剩余阻力占总阻力的比例也随之增加。剩余阻力系数随着吃水的增加而增大,但摩擦阻力系数表现出递减的趋势;摩擦阻力系数随着航速的增加而不断减小,但剩余阻力系数随着航速的增加呈现出先增大、后减小的规律,并且在Fr∇为1.25 附近存在峰值点。
5)在首部合适位置加装防溅条可以有效地减小模型在吃水较大时的运动姿态幅值,缓和模型在起滑阶段的埋首现象,使模型能顺利进入滑行状态。
