基于功能建模的多边折弯机规避与创新设计
2020-01-10龙晓斌梁雪梅
梁 铠,杨 杰,龙晓斌,梁雪梅,陆 佳,刘 雄
(1. 广东工业大学 机电工程学院,广东 广州 510006;2. 广东省创新方法与决策管理系统重点实验室,广东 广州 510006;3. 奥美森智能装备股份有限公司,广东 中山 528455;4. 广东省生产力促进中心,广东 广州 510070)
产品创新设计除了从无到有的新产品开发模式外[1-2],一个更常用的模式就是对现有产品进行改进与优化,但市场中的竞争对手往往做好了充分的专利布局,大大增加了创新的难度。面对客户需求的不断变化,金属制品的形状日益复杂。传统压力式、模具成型的折弯机已遇到瓶颈,一种多边折弯机得到了越来越普遍的应用。该多边折弯机针对待加工钣金件进行一次定位后,通过控制一副通用的万能模具进行复杂的复合运动,从而得到各种特殊形状的钣金件。而控制万能模具进行复合运动的折弯机构,则是整个多边折弯机核心技术所在。
面对激烈的市场竞争,众多企业纷纷加大了专利布局的力度和强度,创新方案侵权的风险显著增加。常规专利规避的方法对个体工程经验依赖度较高,规避的效果和效率存在较大的随机性和不确定性[3]。本文将发明问题解决理论TRIZ与已有专利规避方法相结合[4-5],力求能够为专利规避提供规范化、系统性的设计思路,在实现产品快速迭代创新的同时,可以显著降低专利侵权的风险,并以多边折弯机为例进行了分析与验证。
1 面向专利规避的产品创新流程
TRIZ本身就是通过对数百万份专利进行分析、提炼及总结后形成的一种系统创新理论[6-9],其创新流程的逻辑性和创新工具的实用性已被不同行业领域的工程实践所充分证明。该理论认为产品本质上都是由一些组件构成的技术系统,每个组件都有其功能,整个技术系统也有其功能。从客户需求角度而言,需要的并非这些组件乃至整个技术系统,而是它们能够实现的功能。
1.1 基于TRIZ的专利规避流程
图1为基于TRIZ的专利规避流程,传统的TRIZ应用流程通常将功能建模、矛盾、物场等工具并行求解,而本文则先通过检索与分析确定目标专利,在此基础上识别出技术特征对应组件,结合组件间相互作用,进行产品功能建模。通过裁剪策略对功能建模得到的模型进行修剪,得到侵权风险较小的裁剪模型或方案,再从可行性、可制造性、低成本、快速响应等多方综合诉求的角度,识别方案存在的次生问题,并将其转换成TRIZ标准问题,采用TRIZ求解工具对方案进行优化,进一步降低侵权风险并能应用于实际生产。
1.2 目标专利识别
图2为目标专利识别流程。对于有价值的产品,设计者往往申请了实现相同功能的为数众多的专利,因而规避专利侵权风险的关键前提就在于找出该类产品的一系列相关专利,并识别出高风险的目标专利。
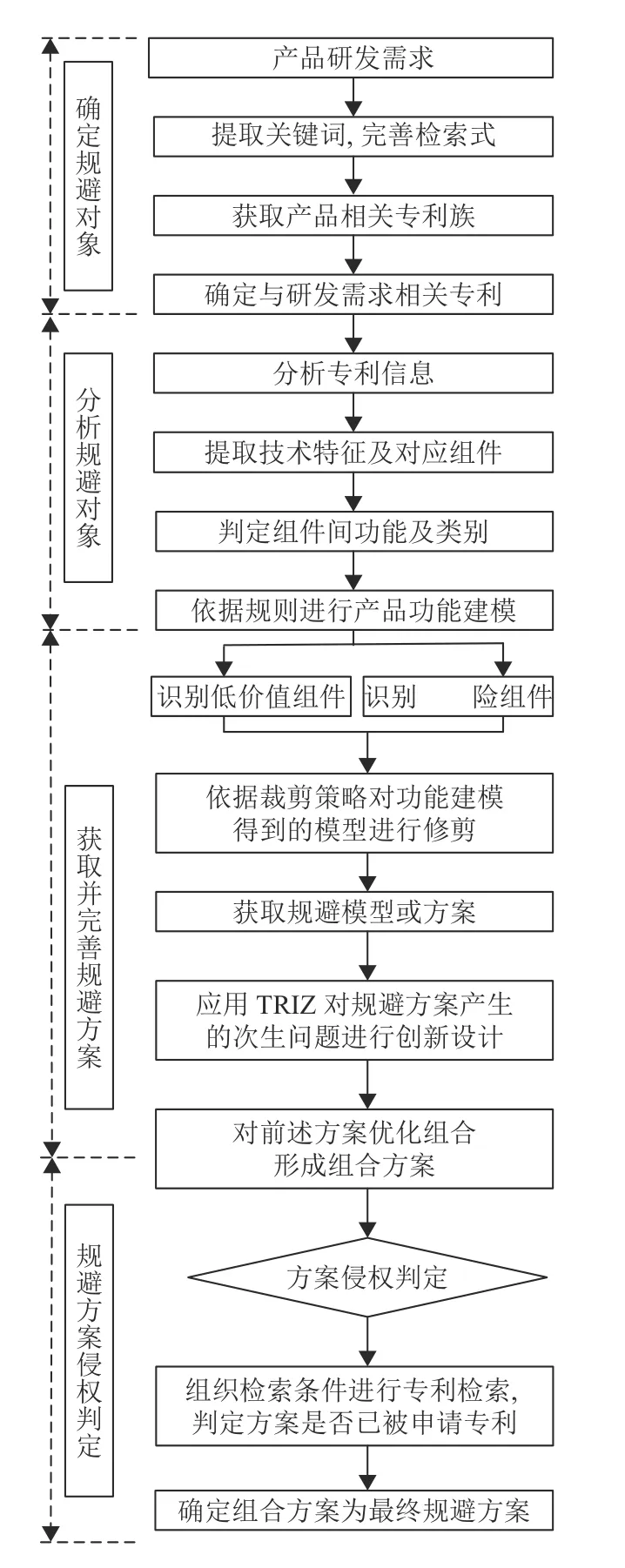
图1 基于TRIZ的专利规避流程Fig.1 TRIZ-based patent evasion process
1.3 产品功能建模
图3为产品功能建模流程,该流程将功能建模分成3个模块:基于技术特征提取的组件识别、基于组件识别的产品功能建模、基于功能建模的裁剪策略。
(1) 基于技术特征提取的组件识别。专利文献当中的核心就是权利要求,它规定了专利权的保护范围[10-11]。为了避开现有专利技术的保护范围,需对产品专利文献进行分析,分解其专利权利要求,从中提取产品技术特征[12-13]。针对专利规避的产品功能建模,其难度较大的主要原因在于为了扩大专利权保护范围对必要技术特征的描述并非全部表示为明确的组件,有些是以较为抽象的功能予以表述,这将不可避免地增加功能建模中组件识别的难度。而一旦识别有误,产品的创新性与新颖性必然受到较大影响,因而将抽象的功能描述转换为相对清晰具体的组件就显得尤为关键。
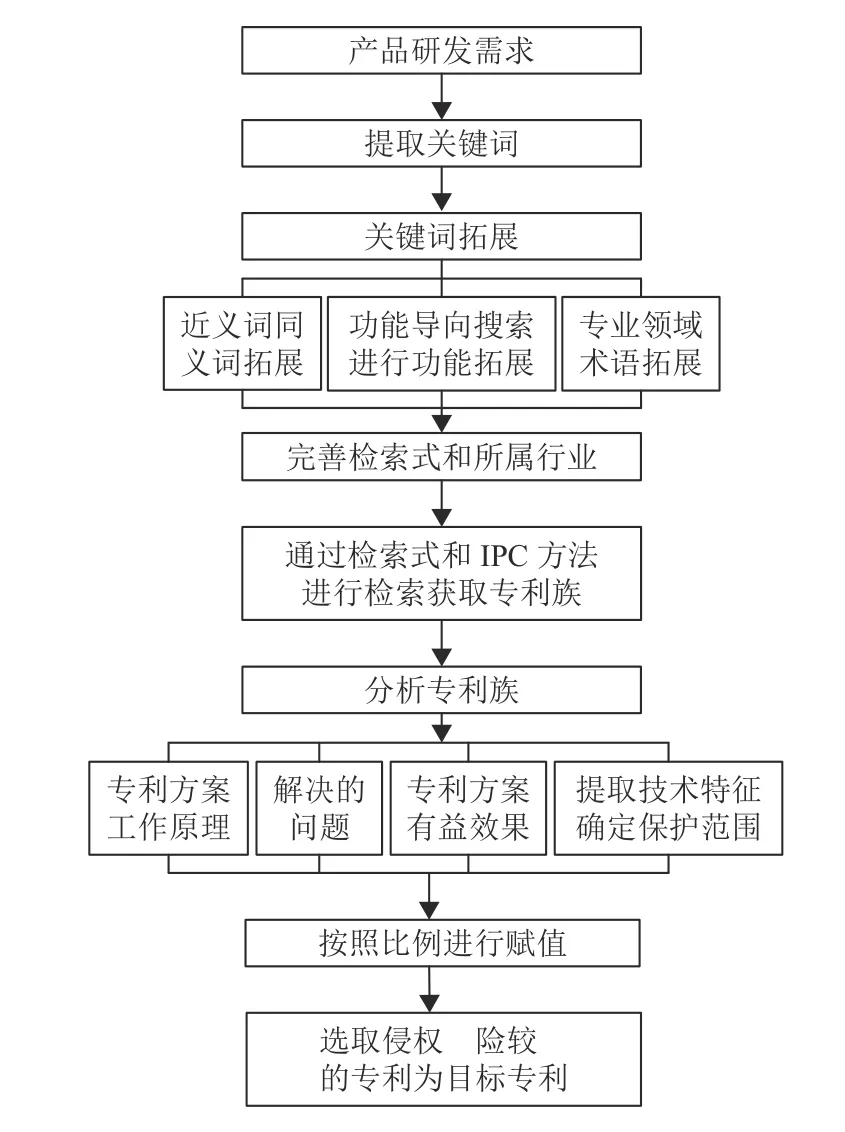
图2 目标专利识别流程Fig.2 Identification process of target patents.
(2) 基于组件识别的产品功能建模。在前述分析的基础上,通过组件列表识别出组件层级,进一步判断组件间功能(即组件的某个参数被另一个组件保持或改变)及其类型,最后将组件通过功能表示的图形符号连接起来,即完成了功能建模。
(3) 基于功能建模的裁剪策略。裁剪是TRIZ理论中的进行专利规避的首选工具[14-16],它是在产品功能模型的基础上,对于价值低和侵权风险高的组件进行修剪,将其承载的功能重新分配到系统或超系统中其他组件,在不降低技术系统功能的前提下,降低专利侵权风险。
2 多边折弯机功能建模
2.1 确定多边折弯机目标专利
多边折弯机主要定位用于进行钣金的折弯加工,通过项目需求提取出关键词“多边” “折弯”及“钣金”。通过对关键词进行拓展,如“折弯”从词义上可拓展成“弯折” “弯曲”等,从功能上可拓展成“翻边”“弯边” “折边” “折缘”等,从专业上可拓展成“柔性加工” “数控加工”和“柔性制造”等,根据检索系统检索规则完善检索式,通过结合ICP检索方法对产品专利进行检索,并剔除与产品研发需求相关性低的专利,表1为专利检索结果。依据专利说明书的描述,结合各指标权重比,确定专利WO/2018/000677[17]为目标专利。
2.2 基于技术特征提取的组件识别
由于专利权利要求中组件“水平驱动结构”和“竖直驱动结构”不明确,只知两者功能是控制C型折弯刀运动,为了后续步骤正常进行,因此需进行组件识别。针对前者,将其功能按照能量传递过程依次分解为驱动、放大、传导和执行,再将分功能对应到相应组件,图4为水平驱动结构组件识别。同理得到竖直驱动结构组件识别,如图5所示。
通过基于技术特征提取的组件识别过程将识别得到的不明确的组件与易识别组件进行组合,通过将专利技术特征与组件对应,结合组件分析确定组件层级,得到基于技术特征的组件识别,如表2所示。根据专利实施方案,经过组件分析确定系统作用对象为金属板料。
2.3 基于组件识别的多边折弯机功能建模
结合专利权利要求和专利说明书中对其组件相互作用关系的描述,识别两两组件之间功能的有无及功能的类型,将有功能的组件通过箭头的连接,由功能载体指向功能对象,从而构建得到图6的多边折弯机功能建模。
2.4 基于多边折弯机功能建模的裁剪策略
专利侵权的一个主要判断标准即是否使用了专利文献中所描述的实现整个技术系统功能的n个组件,如果使用少于n个组件或用新的组件及其结构形式实现相同的功能,就有可能规避侵权风险。
2.4.1 基于低价值组件裁剪的规避设计
低价值组件包括两类:一类是实现功能的价值不高但不会产生有害功能;另外一类是实现功能价值不高且伴随有害功能。结合多边折弯机功能建模可看出加强连接板属于后者,而通过组件价值分析知组件销轴、连接板、转轴、连杆3属于前者,依据裁剪规则A,将系统低价值组件进行裁剪。由于曲轴对正常工作的条件要求过高。根据裁剪规则D,裁剪组件曲轴,其功能转移到组件连杆上,得到方案Ⅰ为基于曲柄−连杆结构的规避方案。
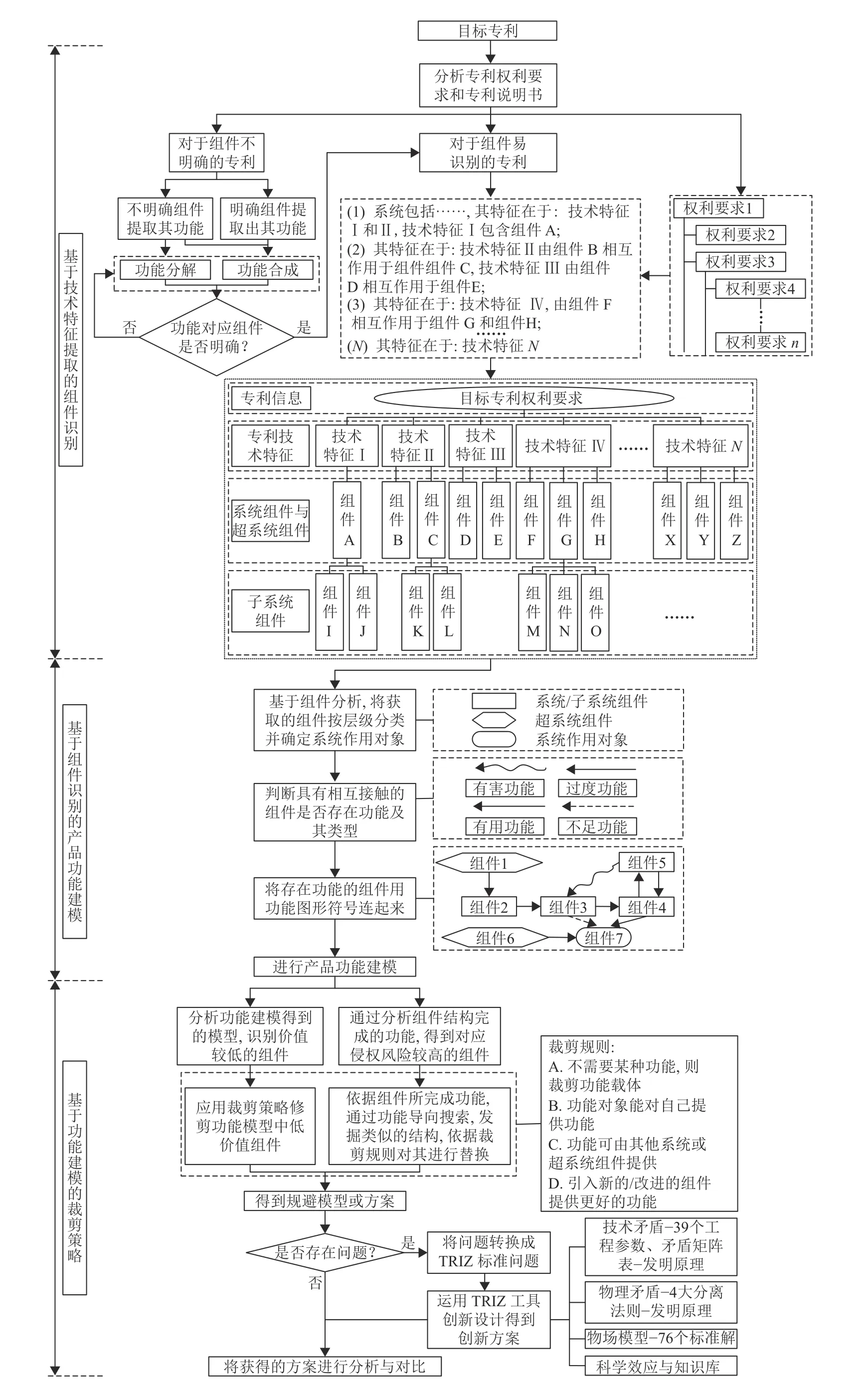
图3 产品功能建模流程Fig.3 Process of product functional modeling
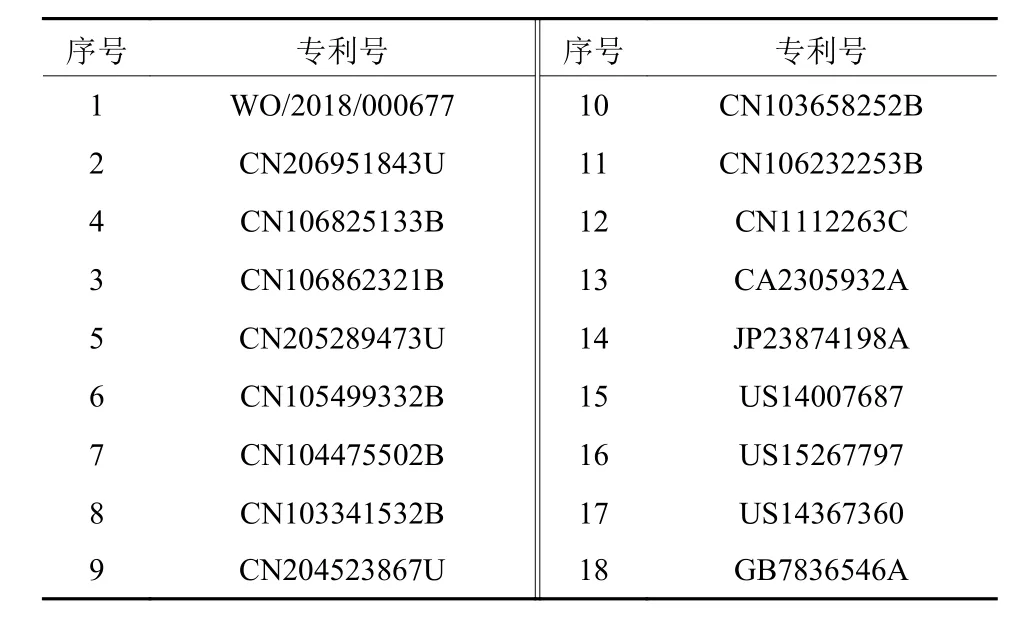
表1 专利检索结果Table 1 Results of patent search
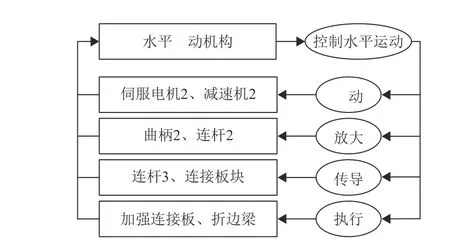
图4 水平驱动结构组件识别Fig.4 Component identification of horizontal drive structure
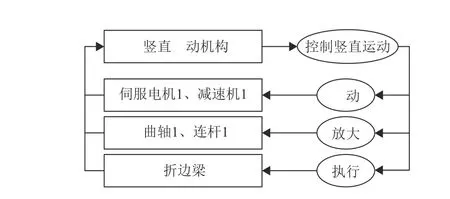
图5 竖直驱动结构组件识别Fig.5 Component identification of vertical drive structure
2.4.2 基于高风险组件裁剪的规避设计
由前述所知,多边折弯机关键技术在于折弯刀的复合运动控制,因此对于多边折弯机而言侵权风险较高的组件主要来源于驱动源和中间传导结构对应的组件。
(1) 通过引入新组件气缸或液压缸,用气缸或液压缸直接控制C型折弯刀运动,得到方案Ⅱ为基于气/液压控制的规避方案。
(2) 通过引进新组件丝杆,由伺服电机控制丝杆进给和转向来控制C型折弯刀运动,得到方案Ⅲ为基于丝杆螺母副结构的规避方案。
表3为规避方案汇总表,将方案Ⅰ、Ⅱ和Ⅲ通过图表形式展示出来,并对比各方案的工作原理及特点,为后续方案评价和组合奠定基础。
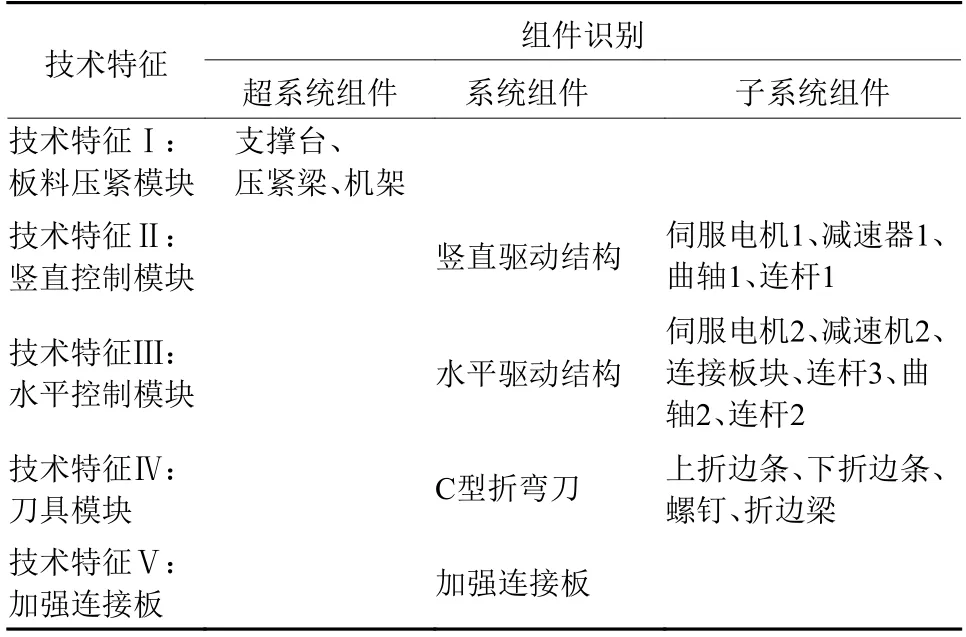
表2 基于技术特征的组件识别Table 2 Component identification based on technical features
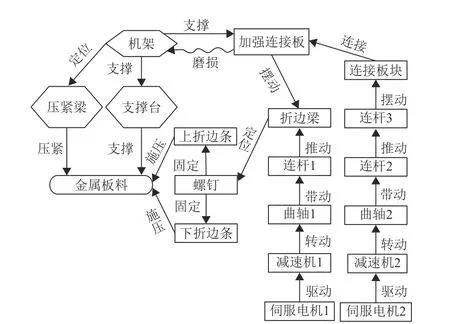
图6 多边折弯机功能建模Fig.6 Functional modeling of multilateral bending machine
2.5 次生问题的求解
2.5.1 基于技术冲突的丝杆螺母副结构创新设计
技术冲突即技术矛盾[18],当优化了技术系统某个参数的同时会导致另外一个参数恶化。将问题转换成TRIZ标准问题,描述成为了改善折弯的精度,需将增大丝杆直径。对应到TRIZ的39个工程参数,即改善了制造精度,恶化了物质的量,结合矛盾矩阵表,获取相应发明原理。根据发明原理No.3局部质量、No.24借助中介物、No.1分割的启发,得到方案Ⅳ为基于丝杆螺母副结构创新设计。
2.5.2 基于物理矛盾的楔形块结构创新设计
物理矛盾[18]指的是对一个对象的某一参数具有互斥的不同需求,解决物理矛盾的核心思想[19]是实现矛盾双方的分离,通常用到的4大分离法则分别为空间分离、时间分离、条件分离和整体与部分分离。将问题转换成标准问题后,描述成在控制C型折弯刀运动时,竖直或水平方向的速度总会有相反的要求,故构建出一组物理矛盾,由于该矛盾发生于空间,因此对矛盾进行空间分离。通过分离法则与发明原理的对应关系,通过发明原理No.1分割和No.4增加不对称启发,得到方案Ⅴ为基于分割和不对称原理的楔形块结构创新方案,通过发明原理No.1分割和No.24借助中介物的启发,得到方案Ⅵ为基于分割和中介物原理的楔形块结构创新方案,其中楔形块的控制如图7所示。
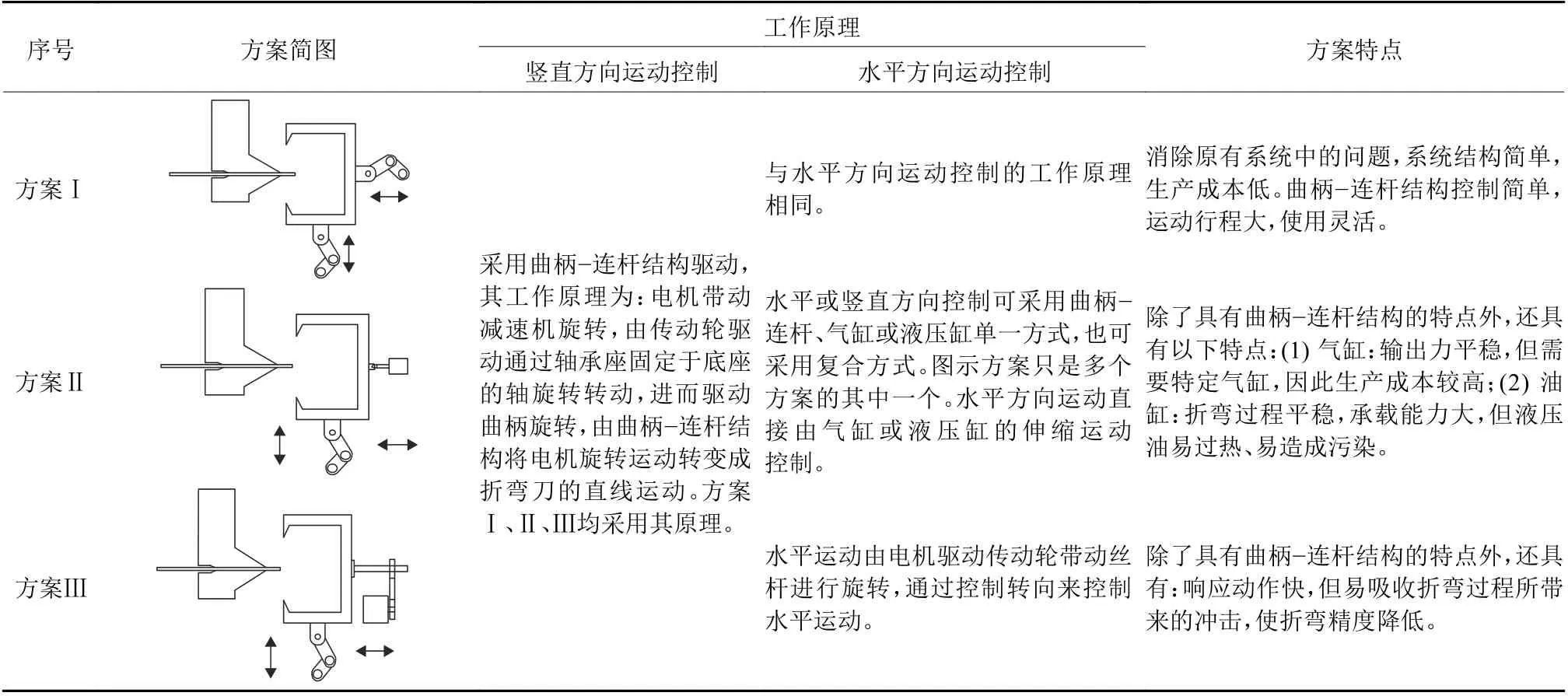
表3 规避方案汇总表Table 3 Summary of circumvention schemes
表4为创新方案汇总表,将方案Ⅳ、Ⅴ和Ⅵ,通过图表形式展示出来,并对比各方案的工作原理及特点,为后续方案评价和组合奠定基础。
3 方案评价
3.1 方案组合
将一组方案汇总表中的方案结构进行分析和对比,优选曲柄−连杆结构控制竖直方向运动,优选楔形块结构控制水平方向运动并将两者组合得到图8的组合方案。
3.2 侵权评价
专利方案的技术特征由表2知有5项。而组合方案没有加强连接板,仅有4项技术特征,即组合优化方案不存在全面覆盖的问题。由于水平控制模块与竖直驱动控制模块具有明显区别,因此不存在等同问题。根据专利侵权判定原则和方法[20-23],判定组合方案不侵权。
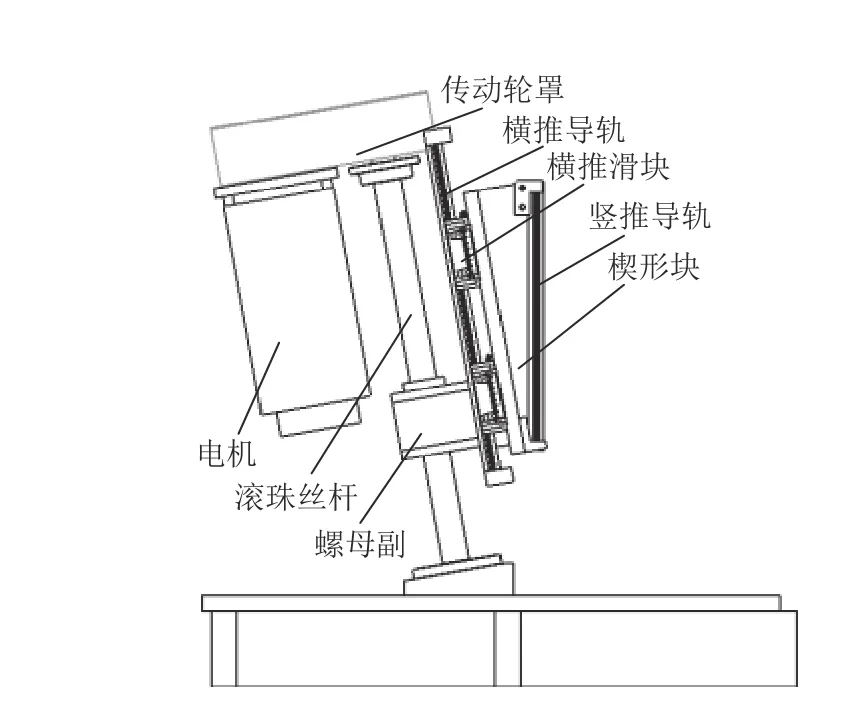
图7 楔形块的控制方式Fig.7 Control mode of wedge block
4 结论
本文研究了基于功能建模的多边折弯机创新与规避设计,通过总结优化现有规避方法,得到基于TRIZ的创新规避方法,并对其围绕功能建模及应用的关键问题进行了研究和分析。该方法在多边折弯机的规避设计中得到了验证,经系统分析得到了较多创新方案,优化组合后的方案不仅充分降低专利侵权的风险,而且满足了产品快速创新且能够应用于实际生产的需求。该方法对于不同行业领域产品的规避创新都具有积极的借鉴意义和实用价值。
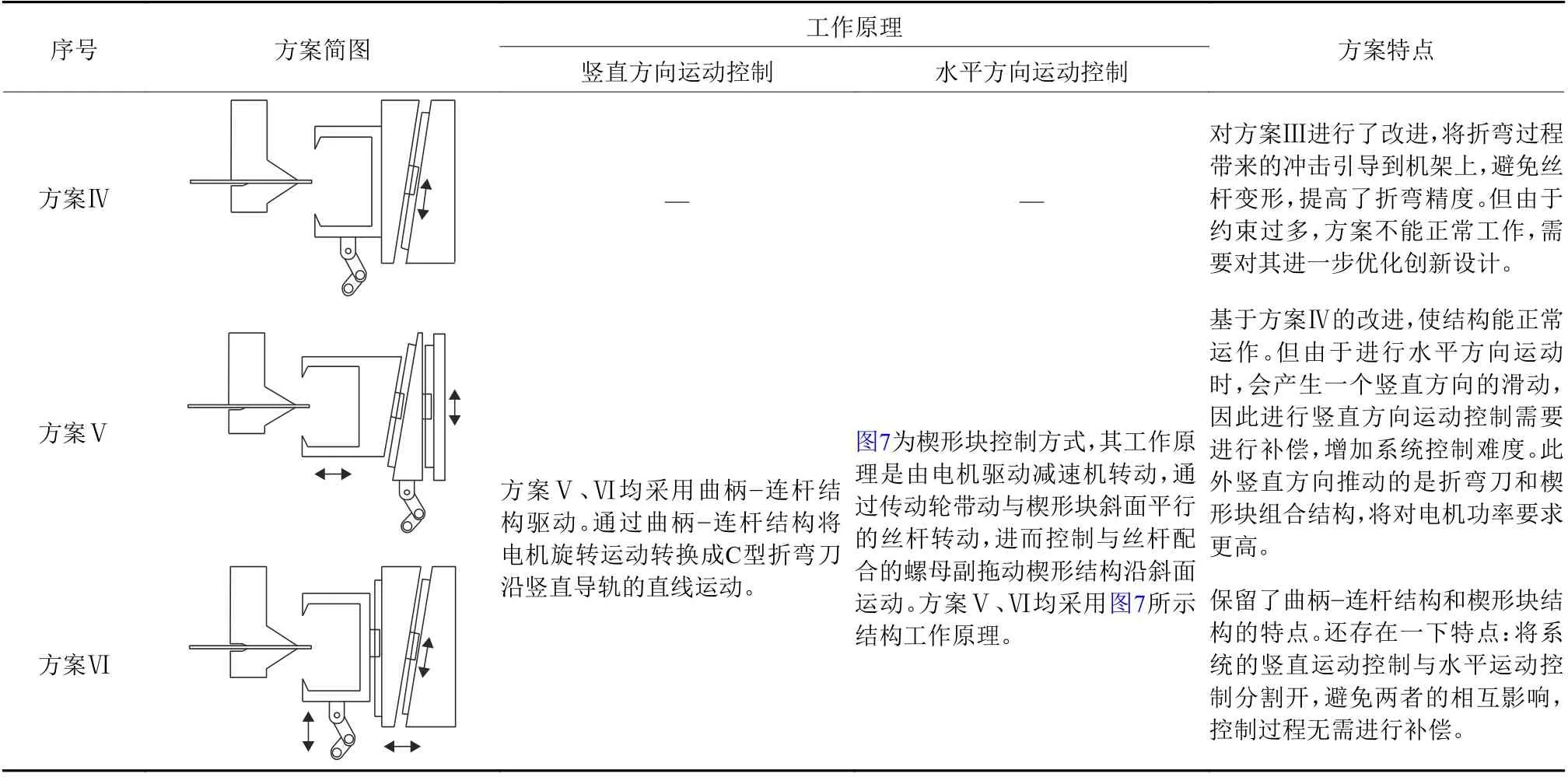
表4 创新方案汇总表Table 4 Summary of innovation schemes
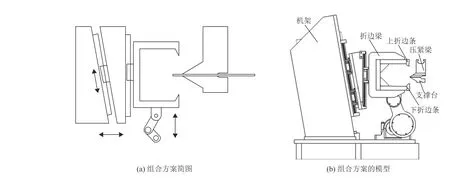
图8 组合方案Fig.8 Combination scheme
