无人机倾斜摄影技术在城市化建设中地质灾害早期识别应用
2020-01-10唐晓玲潘国耀
吴 森,陈 超,邓 晶,薛 廉,唐晓玲,潘国耀
(四川省地质工程勘察院,成都 610032)
作为我国西部地区重要的中心城市,成都市目前正在实施“东进、南拓、西控、北改、中优”的城市空间发展战略,构建“双核联动、多中心支撑”网络化功能体系,加快建设全面体现新发展理念的国家中心城市[1]。在城市化建设过程中,成都市面临着富水松散砂砾卵石土、膨胀性粘土、软土地基和基坑边坡的稳定性、含膏盐(钙芒硝)泥岩溶蚀性和腐蚀性、崩塌、滑坡等诸多地质问题。如2014年7月9日,武侯区棕树南街停车场发生塌陷;2015年7月9日,二环路北三段一小区发生塌陷等等,如何实现地质灾害的早期识别,早期处理成为当前城市化建设面临的一大难题。
目前,部分学者在地灾早期识别应用方面做了大量的研究工作,并取得了一定的成果。巨袁臻[2]基于无人机摄影测量技术,利用差分模型,通过多期数据处理对比,实现对黑方台黄土滑坡的早期识别;褚宏亮[3]利用三维激光扫描技术,对重庆南川金佛山颤子岩危岩体、抚顺西露天矿南邦滑坡等灾害进行了研究,总结一套基于三维激光扫描技术的地灾调查、监测、早期识别方法;何朝阳等[4]利用InSAR技术对杂谷脑河左岸3处地灾点进行了识别,并通过地表位移监测,验证了识别结果;李勋等[5]基于DEM和遥感影像,应用定量地貌学原理及方法,实现了对天水市周边黄土滑坡的识别。但针对城市化建设过程中地质灾害早期识别方法,却少有应用案例,本文以成都市锦城广场及周边为例,介绍了一种基于无人机倾斜摄影技术的地灾早期识别技术与方法。
1 无人机倾斜摄影技术
无人机倾斜摄影技术是通过在无人机平台上搭载一台或多台带传感器的相机设备,构成倾斜数字摄影测量系统,从垂直、侧视和前后视等不同角度采集场景区域的多视角数字影像技术[6]。
倾斜摄影自动化建模由于是在航拍影像和控制点的基础上,通过计算机自动构建的,不会存在人工建模时人为的选择性构建和修饰过程,可以还原真实场景的完整面貌,实现全要素覆盖,具备高效率、高精度、高真实感、低成本“三高一低”优势,该技术在城市化建设过程中的地质灾害早期识别上,有着独特的优势。
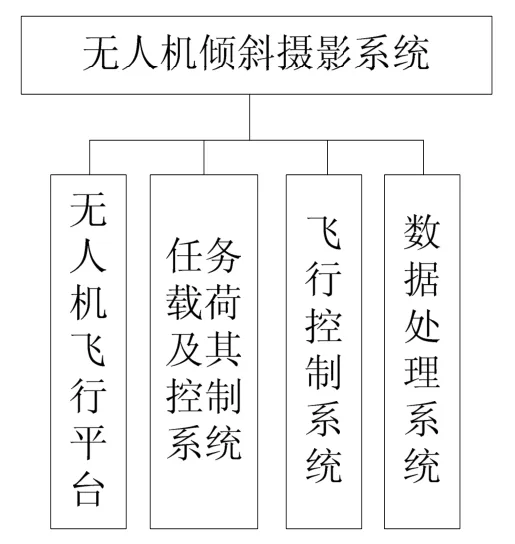
图1 无人机倾斜摄影测量系统组成
1.1 无人机倾斜摄影系统组成
无人机倾斜摄影测量系统一般由无人机飞行平台、任务载荷及其控制系统、飞行控制系统、数据处理系统等几部分组成[2、7](图1)。
1)无人机飞行平台即是搭载测量任务传感器的载体,常用的无人机飞行平台有固定翼平台、多旋翼平台、直升机、无人飞艇等。
2)任务载荷及其控制系统主要用于获取目标区域多视角数字影像数据,由任务设备、稳定平台、任务设备控制系统组成。
3)飞行控制系统是为了实现无人机飞行控制和任务荷载管理,包括机载飞行控制系统和地面控制系统两个部分。
4)数据处理系统将获取的无人机姿态信息(POS数据)解算转换至城市建设采用的坐标、高程系统,并与影像一一对应,按照后处理软件规定的格式进行预处理,保证数据格式正确和资料完整再提供给专业软件进行空三计算、点云密集匹配,以便生成正射影像图、数字线划图、应急专题图等不同类型的数据产品,经过信息提取后,为地质灾害早期提供数据支撑。
1.2 倾斜摄影技术处理流程
无人机倾斜摄影自动化建模技术主要包括外业数据采集、内业数据处理两大部分工作,建模流程参见图2。
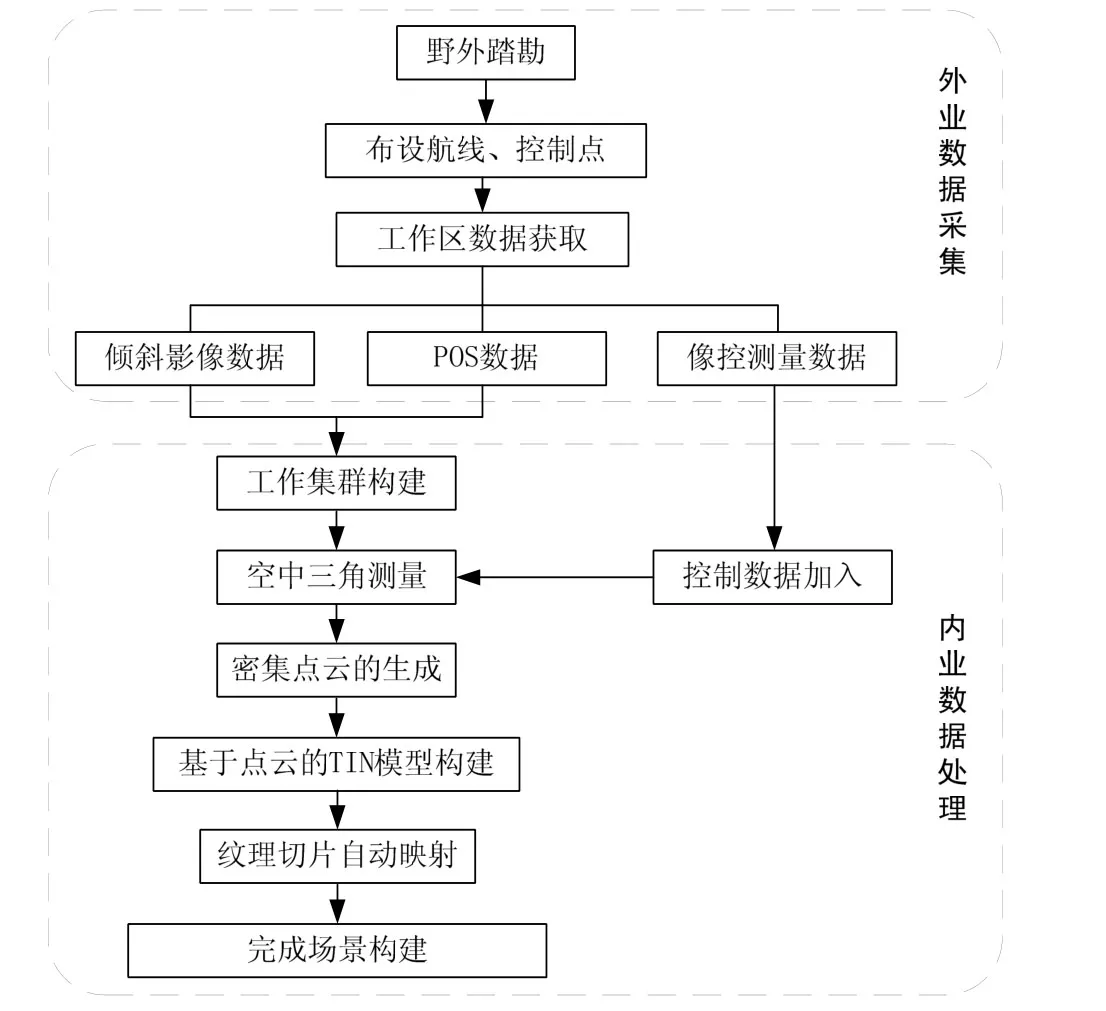
图2 无人机倾斜摄影技术处理流程
2 地质灾害早期识别技术
在城市化建设过程中,可以通过倾斜摄影大区域视角对地质灾害进行早期识别,可结合InSAR 形变解译,辅助对比分析,整体识别流程(图3)主要包括以下几个方面:
1)通过无人机倾斜摄影技术,构建识别区三维立体实景模型、高分辨率正射影像;
2)影像监督分类划定:工程建设区、非工程建设区;
3)通过三维立体实景模型、高分辨率正射影像、航拍源影像综合解译识别形变区,同时,可结合InSAR 形变解译进行对比分析;
4)通过地面调查,现场核查、验证形变区;
5)综合识别与核查成果,进行风险评价,划定威胁区范围。

图3 地质灾害识别技术流程
3 人机倾斜摄影技术在城市化建设中地质灾害早期识别
本次选取地下空间利用强度高、目前周边城市化建设频繁的锦城广场作为此次地灾早期识别的研究区。锦城广场研究区范围内拥有多种不同类型的地面设施,北部锦悦路以北为居民集中居住区,建筑密度较大;中心为环球中心,是全球最大的单体建筑;绕城高速从西到东贯穿全区,地铁1号线从南到北穿过区内,附近城市化建设频发,施工工地多,不管是从不同的用地类型,还是道路交通、建筑体量、地下空间开发深度看,锦城广场研究区具有复杂的城市结构,对他的研究具有十分典型的意义。
3.1 无人机倾斜摄影数据获取与处理
本次研究采用了CW-30 油电混合无人机机搭载5 镜头相机进行了航飞。CW-30为双尾撑布局、后推式油动垂直起降固定翼无人机,具备垂直起降,全自主起飞,RTK 定点起降、精准导航等优异功能外,其最大载荷能力达6kg,负载续航达6小时。
1)外业数据采集
本次CW-30无人机的飞行高度为280m,地面平均分辨率优于3cm。飞行的航向重叠率为80%旁向重叠率为70%[8],飞行航线见图4。
地面控制点主要有两种类型,一类是地形特征点,包括明显的道路转角和明显的地物标识;一类是专门为航拍所做的人工标识[9]。此次共布设控制点50个,直接利用RTK 采用CORS系统获取控制点国家2000 坐标数据,高程数据采用水准精化模型转换参数转换为1985 国家基准高程。此次航摄共飞行两个架次,获取照片24135 张,经检查,POS数据解算合格,影像质量较好,冬季有薄雾,云量为0。
2)内业处理
本次选用了Context Capture软件全自动处理软件作为数据处理软件。Context Capture 将数据处理过程分为以下六个步骤:工作集群构建——空中三角测量——密集点云的生成——基于点云的TIN模型构建——纹理切片自动映射——完成场景构建(图5)。

图4 无人机航线规划
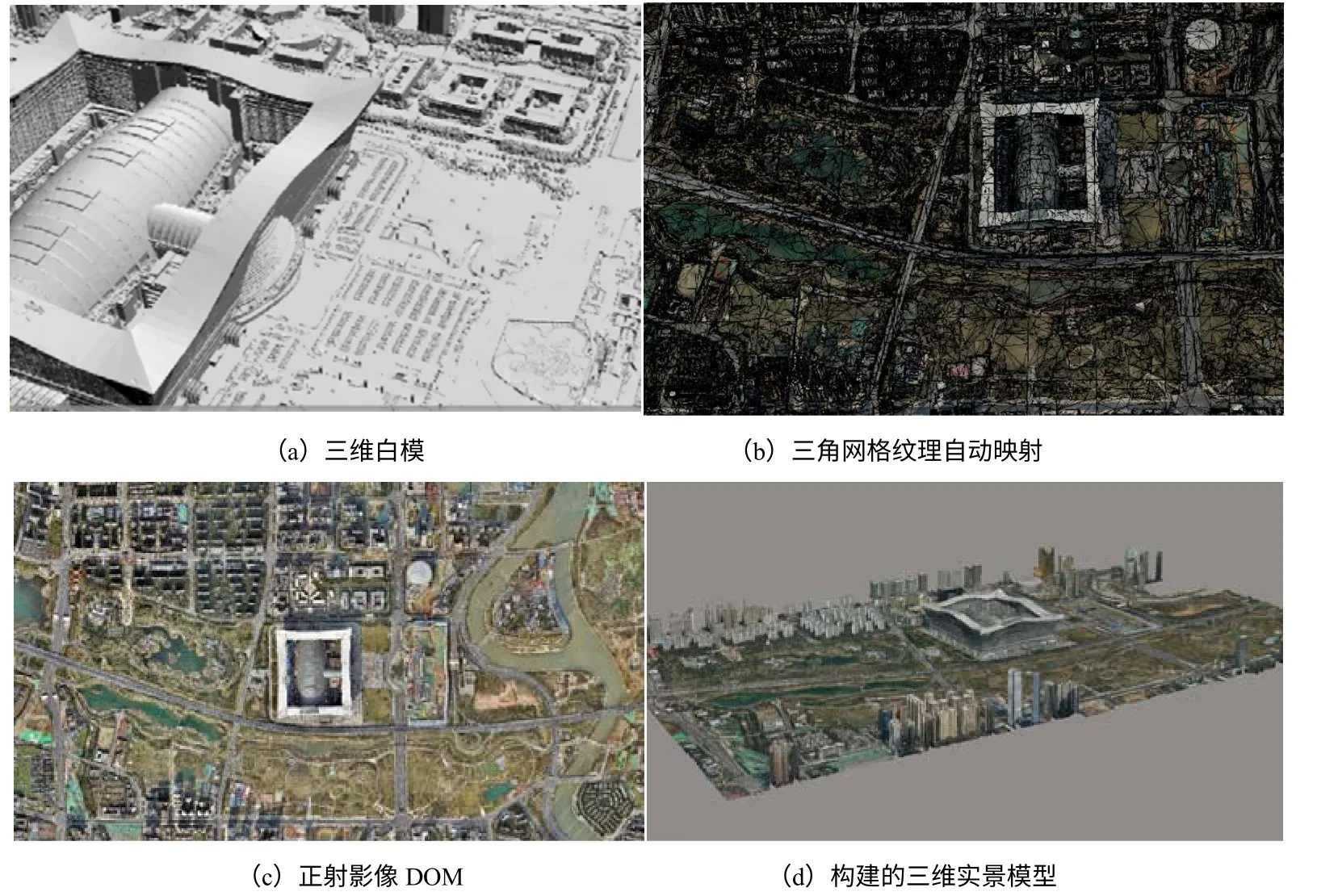
图5 内业数据处理
3.2 地质灾害识别
完成的倾斜摄影成果还原了研究区的真实三维实景场景,实现全要素覆盖,此次地质灾害形变的识别采用正射影像DOM(精度3cm)与倾斜摄影真实三维实景场景相结合,进行综合分析。
本次研究范围内形变区及建设施工区的识别,主要通过对正射影像DOM 进行监督分类与人工部分干预相结合的方法进行,再结合倾斜摄影真实三维实景场景分析区内形变[10],分析结果参见图6。

解译形变区核查、验证表
3.3 地面核查、验证、风险评价
依据地质灾害形变分析结果,通过地面调查对解译形变区进行现场复核、验证、风险评价,复核验证、风险评价结果参见附表:解译形变区核查、验证表。
4 结论
1)为了解决城市化建设中地质灾害识别问题,本文提出了一种基于无人机倾斜摄影技术的地质灾害早期识别技术与方法
2)以锦城广场为例,介绍了无人机倾斜摄影技术在城市化建设中地质灾害早期识别中的应用流程,本次共解译、识别出地面塌陷点3处,地裂缝2处,其中2处风险中等、2处风险较低、1处风险低。
3)无人机倾斜摄影技术具有效率高、机动性强、投入少、精度高的优势,可以方便技术人员快速解译、分析、识别城市化建设过程中地质灾害问题,具有较好的推广前景。

图6 地质灾害形变识别
