基于修正大质量法的船体振动及水下声辐射预报
2020-01-10姜超君向阳何鹏张波
姜超君,向阳*,何鹏,张波
1 武汉理工大学能源与动力工程学院,湖北武汉430063
2 中船动力研究院有限公司,上海201206
0 引 言
船体声振响应预测关系到船舶的舒适性及隐身性,是舰船研究的一个重要领域。通过提高声振预测精度,设计人员可在前期有针对性地对结构设计方案进行优化,从而提升船舶建造的整体效率。一些主流的商业仿真软件,例如ANSYS,Nastran等可快速、直观地预报相应船体及舱段结构的声振响应,因此得到了广泛应用。但运用这些仿真软件进行声振预测存在一个问题,即是在进行主激励设备振动的台架试验时,一般只能获得机脚传至基础表面的振动加速度信号,无法直接获得机脚激振力,而主流仿真软件所能施加的载荷则为激振力。针对此问题,目前解决的方法主要有惯性载荷法、相对运动法、拉格朗日乘子法[1]、大质量法(LMM)等。其中,LMM 适用于结构多点激励分析,且能克服相对运动法求解大型复杂结构的不便,故备受青睐。LMM 最初主要用于模拟地震激励对地面物体运动特性的影响[2],而后在汽车、船舶等结构分析中得到了应用[3-4]。
不过,虽然LMM 操作简单、使用方便,但由于缺少严密的数学推理和清晰的物理概念,其求解精度和适用性在很长一段时间备受争议[5]。为此,Paraskevopoulos 等[6]研究了LMM 在特定情况下的适用性;Kim 和Jhung[7]针对单自由度和多自由度模型,对LMM 进行了数理分析并给出了详尽的数学推导过程。在LMM 求解精度方面,周国良等[8]研究指出,在考虑系统阻尼时,应用LMM 会产生附加阻尼力并导致误差;许玲玲等[9]在此基础上,在基于LMM 解决离散元法的多点激励问题时引入了质量比例阻尼系数,减小了计算误差;黄炳臣等[10]将此改进思路运用到核电反应堆冷却系统的时程计算中,补偿了大质量点因瑞利阻尼产生的运动阻力,从而提升了计算精度。在船舶领域,王迪等[11]基于LMM,计算了某船舶舱段的水下辐射噪声;Zhang 等[12]则以某油船为研究对象,应用LMM 计算了船体结构振动响应,结果显示仿真结果与实测值较为吻合。
以上针对船舶声振响应计算的文献中,均未提出对于LMM 的修正。为此,本文将在参考文献[8-10]的思路的基础上,首先将其应用到船舶声振计算领域,引入质量比例阻尼系数,对LMM 的等效加速度予以修正,以进一步提升仿真精度;然后分别应用修正及未修正的LMM 进行全船振动响应计算,通过与实测振动响应数值的对比,证明修正大质量法(M-LMM)的精准度更优;最后,以全船谐响应计算结果作为边界条件计算外场辐射噪声,进一步讨论2 种LMM 计算得到的辐射噪声结果。
1 基本原理
1.1 船体结构响应的大质量模型
如图1 所示,在设备机脚激励引起的船体结构响应分析中,激励由设备结构传向船体,因此将设备设为大质量。
建立大质量单自由度简化模型,设备大质量M与质量块m建立刚性连接,对于整个由M-m构成的振动系统,将大质量结构与基底的振动微分方程联立表示为矩阵形式,有

式中:k为质量块m 与大质量M 间的连接刚度;xs为大质量M的位移;xb为质量块m的位移;z̈为大质量M 的加速度;Mz̈=F,为加诸于基底的激振力。
参考式(1)的矩阵形式,多自由度大质量模型的总振动微分方程可以写为

将式(2)包含的所有方程累加,可得

式中,i为各质量块编号。式(3)可写为

1.2 引入阻尼项的LMM 修正
在上节讨论的基础上加入对阻尼的考虑。将式(2)写成矩阵形式,并加入阻尼项,有



式中:C11,C12(C21),C22分别为大质量阻尼分块矩阵、船体与大质量的耦合阻尼分块矩阵及船体阻尼分块矩阵;K11,K12,K21,K22为相应的刚度分块矩阵。将式(6)中包含的矩阵方程展开并累加,有


式中,α和β为瑞利阻尼系数。将式(8)代入式(7),等式两边左乘后有

α并非无穷小量,故将αẋb作为干扰项,会影响LMM 计算结果的精度。因此,需增加补偿力αz̈加以修正。质量相关系数α可参照文献[13]进行计算:

式中:ξ为阻尼比,一般在0.02~0.05 内取值,本文取ξ=0.05[14];ωa与ωb均为结构特征频率,前者取结构基频,后者在对动力响应有较大贡献的高阶振型频率中选取[15]。以某近海油船(图2(a))为研究对象,研究工况为空载返航,此时开启的主要动力设备为1 台主机和1 台柴油发电机组。根据船体设计图纸,建立了考虑流体耦合的全船有限元模型,并在油船双层底处建立了主机(带齿轮箱)和柴油发电机组的基座,如图2(b)所示。以大质量单元模拟设备,大质量设为船体总质量的107倍,随后,将大质量单元与机脚建立刚性域连接。

图2 实船及基座有限元模型Fig.2 Real ship and the seat FE model
提取主机基座与柴油发电机组基座的有限元模型,在对基座底部进行固支约束后再分别进行振型计算。经过计算,对柴油发电机组的基座取ωa=94.18 rad/s,ωb=447.13 rad/s(第8 阶固有频率);对主机及齿轮箱基座取ωa=38.89 rad/s ,ωb=101.73 rad/s(第25 阶固有频率)。由式(10)计算得到柴油发电机组的瑞利阻尼系数α1=7.78,主机及齿轮箱的瑞利阻尼系数α2=2.81。
为准确计算设备机脚载荷力,还必须获取机脚加速度及速度。鉴于所研究油船的运行工况,将主机、柴油发电机组以及齿轮箱作为模拟的激励源设备,其机脚加速度通过实船测取。将各激励设备的机脚加速度实测值在时域上取平均,用以表示各设备机脚的实际加速度值。基于MATLAB平台写入机脚加速度时域信号,调用cumtrapz 函数进行积分,得到相应的速度时域信号如图3所示。
按z̈=ẍ+αẋ计算得到修正的设备机脚加速度,经傅里叶变换,得到20~200 Hz 频段内的加速度频谱如图4 所示。由图可见,修正后,各设备的机脚振动加速度值在激励峰值频率点处改变较小,但在其余频率点处其加速度数值均有不同程度的提高。


图3 激励设备机脚加速度与速度时域信号Fig.3 Seat acceleration and velocity time domain signals of excitation equipment


图4 激励设备机脚振动加速度频谱Fig.4 Vibration acceleration spectrums of excitation equipment's seats
2 船体声振计算分析
2.1 船体振动数值分析
对各个设备的大质量单元施加修正后的力载荷频谱,在20~200 Hz 频段内对全船进行谐响应计算,并提取主要测点的振动数据,用于与实船实测的振动数据进行对比。
测点选择在可能出现较大振幅的位置。参考《船上振动控制指南》中的测点布置方案,并考虑测量现场情况,选择如图5 所示的测点位置。舱内的振动测量则以餐厅、机舱和驾驶室为对象。

图5 船体振动测点布置Fig.5 Arrangement of ship vibration measure points
为保证仿真计算结果的准确性,在有限元模型对应测点附近取4 个节点,提取测点及其相邻节点的振动位移数据,并按下式计算测点的平均振动位移级:

式中,Lai为各节点的振动位移级。将计算得到的各测点的平均振动位移级L-a转化为振动加速度级。限于篇幅,本文仅展示了部分测点实测值与仿真值的对比,结果如图6 所示。
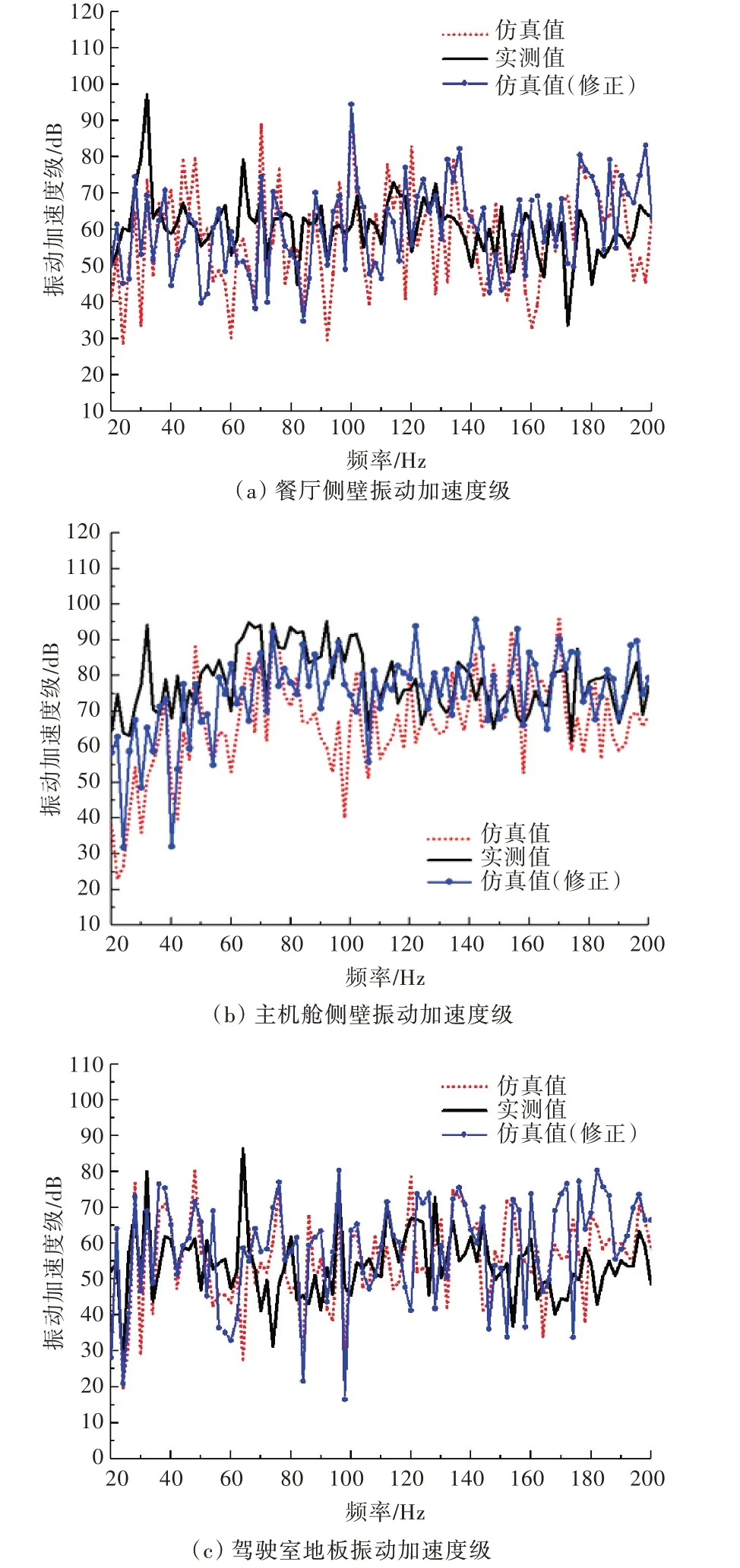
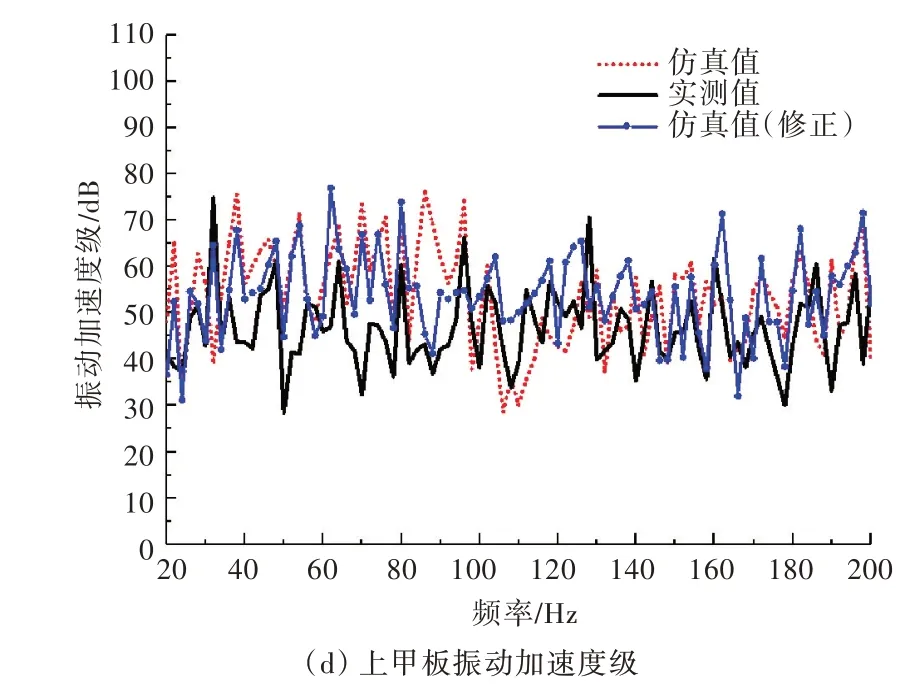
图6 船体及舱内局部测点的实测及仿真值对比Fig.6 Comparisons between the simulation values and testedvalues of local measure points
由图可见,仿真值与实测值的频谱趋势一致性较好,且各测点的主要振动峰值频率基本吻合,可以较为准确地反映船体的振动状态。为了更加直观地判断M-LMM 的准确性,将本文基于M-LMM 计算得到的船体各部位的振动响应与文献[12]的计算结果进行了比较。后者使用未经修正的LMM 对同一艘油船进行了谐响应分析。对比参数为船体主要位置处测点在20~200 Hz(频率间隔2 Hz)内合成后得到的带宽内总体振动加速度级。对比结果如表1 所示。

表1 各测点的总体振动加速度级Table 1 The overall vibration acceleration levels of measure points
由表1 可见,除上甲板舷侧的测点以外,其余测点上M-LMM 的仿真精度较之LMM 均有较大改善。在所有测点中,机舱侧壁由于靠近激振源,其总体振动加速度级最大。上甲板舷侧因加筋较弱,也表现出了较大的振动量,这可能是由于船体建模误差、测点距离激振源较远、仿真计算偏差等原因所致,M-LMM 在精度上的改进在该测点没有得到体现。综合考虑各个测点的仿真精度,LMM的平均误差为4.35%,M-LMM 的平均误差则为2.70%,精度提高明显。
2.2 船体声辐射计算分析
将水线以下船体外壳的振动响应结果作为声学边界条件,应用间接边界元法进行声辐射计算:将谐响应计算的rst 文件导入声学分析软件Virtual.Lab,设置外场流体属性,取海水密度ρw=1 025 kg/m3,声速cw=1 500 m/s ,将船体湿表面的位移响应映射到边界元模型上,最后进行辐射声功率的计算。基于2 种LMM 计算得到的声功率频谱曲线如图7 所示。

图7 油船水下辐射声功率Fig.7 Underwater radiation sound power of a tanker
在170~200 Hz 频段内,M-LMM 得到的声功率辐射峰值略大于LMM 所得。对声功率进行带宽内合成,基于M-LMM 的总体辐射声功率为140.547 dB,基于LMM 的则为139.021 dB。因载荷力修正所引起的船体响应数值的提高,在声辐射的计算上也得到了体现。
船舶作为结构复杂的噪声源,其外场噪声辐射有着很明显的方向性,其中垂直声场指向性可用于描述位于垂直于船体纵轴线的横剖面内噪声辐射的方向性。仍以上述油船作为对象,对其水下声场垂直指向性进行研究,分析模型如图8所示。

图8 油船水下噪声辐射垂直指向性的分析模型Fig.8 Analysis model for vertical directivity of tanker's underwater radiated noise
图9 设置了3 个垂直于船体纵向轴线的横剖面,分别用于显示油船艉部、舯部及艏部的声场指向性。以船体中心点所在纵轴线为中心,分别在上述3 个横剖面内设置半径为50 m 的平面场点,计算20~200 Hz 频段内船体的总声压级,得到相应场点上的声压指向性曲线如图9 所示。

图9 声压垂直指向性曲线Fig.9 Vertical directivity curves of underwater radiated sound pressure
由图可见,油船的总体声压以艉部最大,艏部最小,舯部居间。本文所讨论的激励设备均布置在艉部机舱,因此,可以认为艉部的水下辐射声压主要受动力设备激励的影响,而舯部和艏部因离振动激励源较远,故各方向的噪声辐射水平均有所下降。除个别方向以外,采用M-LMM 计算所得的场点声压级均大于LMM 的计算所得。随着截取的横剖面逐渐远离船艉激励源,这种数值差异方面的不对称将逐渐消失,2 种LMM 计算所得的垂直指向性曲线也趋于吻合。
3 结 论
本文基于理论推导分析了使用LMM 时会产生的误差,通过引入质量相关系数,对LMM 进行了修正。通过和实船实测的振动数据进行对比,对M-LMM 计算振动响应的准确性进行了验证,同时基于谐响应计算结果,进一步计算了船舶的水下辐射声功率与垂直指向性。综上分析,得到如下主要结论:
1)较之LMM,M-LMM 的仿真结果能更准确地反映船体结构的振动响应水平。在20~200 Hz分频段内,M-LMM 的仿真值与实测值的频谱曲线较为吻合;对于总体振动加速度级这一评判数值,M-LMM 的平均误差为2.70%,较之LMM 的平均误差4.35%有较大的提高。
2)M-LMM 与LMM 计算所得的辐射功率曲线相近,前者的总体辐射声功率数值略高于后者(1.526 dB);在以船体纵轴线为中心的各个方向上,M-LMM 计算所得的场点声压级基本高于LMM 的计算所得;当远离艉部激励源时,二者在声压级数值方面上差距逐渐减小,指向性曲线趋于一致。
本文在进行声辐射计算时采用了有限元—边界元(FE-BEM)法,由于M-LMM 计算得到的船体振动响应结果更接近于实测值,能够为声辐射计算提供更为精确的边界条件,故理论上和LMM 相比能更准确地模拟油船声辐射水平。但限于设备条件,未能对声辐射计算的准确性进行验证,这是本文今后有待拓展的方面。
