无人船在“智慧治水”的应用
2020-01-08陈静婷

摘 要:文章主要研究的对象是无人船在“智慧治水”中的应用。在“智慧治水”工作中,无人船主要可以实现河道地形勘探,水质情况实时分析和反馈,排查疑似暗管,以及对重点区域采集水样。文章较为全面的阐述了无人船系统架构、无人船实现功能。结合实际的应用项目,通过无人船在实际项目中的应用形式、得到的反馈数据和现场进行比对分析,探讨无人船在“智慧治水”中的可行性和发展前景。
关键词:无人船;水质检测;河床探测;暗管排查;智慧治水
中图分类号:TP392 文献标识码:A 文章编号:2096-4706(2020)15-0137-03
Abstract:The main research object of this paper is the application of unmanned ship in “intelligent water control”. In the work of “intelligent water control”,the unmanned ship can mainly realize the river topography exploration,real-time analysis and feedback of water quality,check the suspected concealed pipes,and collect water samples in key areas. This paper comprehensively describes the unmanned ship system architecture,unmanned ship realization function,combined with the actual application project,through the application form of unmanned ship in the actual project,the feedback data and field comparison and analysis,discusses the feasibility and development prospect of unmanned ship in “intelligent water control”.
Keywords:unmanned ship;water quality detection;riverbed detection;hidden pipe investigation;intelligent water control
0 引 言
“智慧治水”是治水的基礎性保障措施,也是为了河道的长治久安。目前,我国水污染治理,河湖问题仍有很多,如河道积淤未清、企业违法偷排、雨污混流等,而无人船正好可以方便地进行监管和巡检工作,及时掌握主要流域重点断面水体的地形状况、预警预报重大或流域性污水排放事故,监督总量控制制度落实情况、排放达标情况。浙江聚优建筑工程有限公司作为聚光科技集团的一员,致力于环保领域相关工作,并在“智慧治水”中有卓越的表现。
1 无人船定义
无人船是指通过设定路线,借助卫星定位系统,惯性导航、智能避障系统等,自主航行或人工远程控制的“水面机器人”。无人船可以不受天气因素干扰,替代人工完成不同的水上任务,并将数据、图像信息实时回传,使得水上任务更高效、更安全。
2 无人船架构
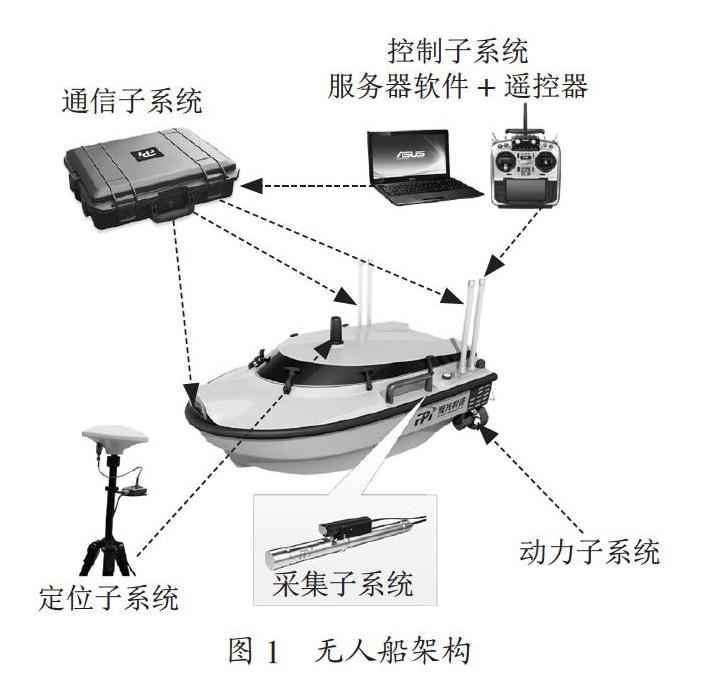
无人船主要由无人船船体、采样子系统、动力子系统、定位子系统、控制子系统(服务器软件+遥控器)以及通信子系统六部分组成,如图1所示。
(1)无人船船体是现场工作实施的载体;
(2)动力子系统可以驱动无人船以预设的速度到达指定位置,推进器可以实现前进、后退和转弯功能,并保证无人船可在水体中进行悬停;
(3)定位子系统可以保证无人船的运动精度,确保采集水样的位置精准,目前采用RTK定位,定位精度达到厘米级别;
(4)通信子系统主要负责上位机软件与无人船的通信,进行数据、视频等信息交换,数据和视频采用不同的通信频段,保证通信质量;
(5)控制子系统由计算机、遥控器配合服务器软件和感知设备来完成,该系统主要实现控制无人船路径规划、避障、自动巡航、采集任务、数据分析等功能。遥控器通过对应的接收机,直接控制无人船操作,服务器软件将数据通过通信子系统传输给无人船进行操作控制。服务器软件可以设置多种常用路线,无人船可以根据设置的曲线进行自动巡航,并可以设置障碍物信息和航行围栏。无人船还可以结合避障模块自主调整路线,如果在设置路线上遇到未知障碍物,无人船可以自动识别并按照策略进行绕行;
(6)采样子系统根据不同的任务有不同的组成:
1)水质分析任务主要包括采样管路、水质分析仪、流路相关部件、以及采样泵等部分,该系统负责将河道湖泊等水体中的水吸入流路,进行实时的水质数据采集分析;
2)水样采集任务主要包括采样管路、采样瓶、流路相关部件、以及采样泵等部分,该系统负责将河道湖泊等水体中的水采集到采样瓶中,带回实验室进行更全面的水质分析;
3)河道勘测任务主要包括水深探测器、高精度RTK以及相关分析电路,该系统负责根据地图比例要求,采集水下河床的层高,最终形成一张水下地形图;
4)流速流量采集任务主要包括流速探测器、高精度RTK以及相关分析电路,该系统负责采集河床切面的水深和各个层级的水速,最多可以实现254层,将整个断面的水速通过模型转化成断面的流量;
5)暗管排查任务主要包括侧扫声呐以及相关分析电路,该系统负责采集河岸两侧水底的暗管、涵道等信息。
3 案例分析
因客户信息需要保密,本文不提供具体的测试地点,代指A河段。
3.1 现场分析
2019年9月,经反馈A河段水体质量差,排口数量多。对A河段进行了前期的考察分析,下文为具体的情况分析。
A河段共有22条支流,其中8条支流是双向流通,7条支流是从干流流出,7条支流是流入干流,水流情况非常复杂。查阅了最近一次清淤的淤泥工程量探测报告,有6个积淤程度较高的位置,详细信息如图2所示,图中箭头表示支流流向,单箭头表示支流单向流入、流出干流,双箭头表示支流双向流通,圆形图案表示淤积程度较高的位置。
3.2 整体方案
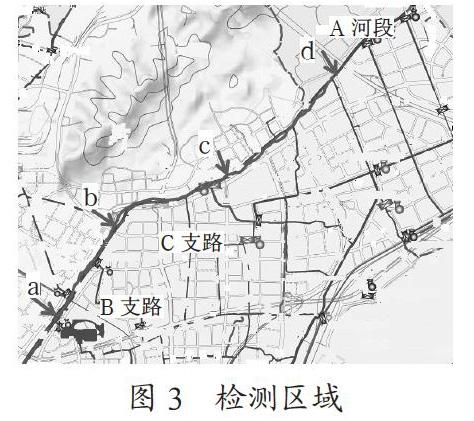
结合以上原始信息及客户反馈的重点整治区域,选择以上A河段重点区域进行检测,对长约2 km河段进行暗管排查和河床地形探测,如图3中bc段所示,并对向两侧延伸长约6 km河段进行水质检测,如图3中ad段所示。
根据无人船一般水污染突发事件排查方法,一般先进行河道的水质实时测量,绘制全面水质分布图,然后深入污染区,利用无人船采样瓶进行采样取证,最后无人船利用侧扫声呐探测水下暗管图像。根据此次现场的特殊性,方案先进行获取水质分布图,然后对周边暗管排查和水下地形测绘。
无人船巡航速度一般在2.5 m/s左右,速度可調,单组电池续航能力为:在2 m/s的情况下,单组电池的续航时间为3 h,电池可拆卸,标配两组电池,可实现6 h续航。
水质分布:根据河道常用水质参数,考虑参数需要快速测量并反馈,所以不考虑需要长时间消减的总磷、总氮等参数,选择水温、ORP、电导率、溶解氧、氨氮和pH值,每个大约100~150采集一次水质数据。
在一个监测断面上设置的采样垂线数与各垂线上的采样点数应符合HJ 495—2009《水质采样方案设计技术规定》。A河段水面宽度约30~40 m,水深1~2 m,所以水质检测应选择河道的中泓线,水面下0.5 m处。
河床地形:河床宽度约30~40 m,采用勘探级别的单波束测深仪,测量河湖横断面,测量精度±1 cm+1 ‰h(h为水深,单位为cm)。地形勘探采用2000国家大地坐标系(CGCS 2000),高程选择1985国家高程基准,勘探精度采用1:500的地图精度,即地形测试点间距≤5 m。
暗管:采用双频侧扫声呐,沿岸来回测试,结合定位设备,最终可生成含位置信息的图像数据。
3.3 测试数据及分析
经过检测,首先得到水质沿程分布图,经过测试数据比对,水质常规参数中,电导率、水温和pH值的沿程变化均不明显,变化率在10%以内,对污染位置的指示不明显;ORP沿程变化较为显著,变化超过了20%,然而ORP与其他水质标志物变化趋势不同,因此和水质类别之间没有明显的正相关性。因此,pH值、电导率、ORP和水温等均没有很好的指示作用。
6 km河段共测量水质检测点45点,根据溶解氧判别的水质总体为Ⅳ类,溶解氧浓度偏低处,都是支流汇入处,因此可能是支流汇入导致,但对污染位置的指示不明显。
以氨氮进行评价,总体水质为Ⅲ类;氨氮浓度沿程变化明显,在0.32 mg/L~0.93 mg/L之间变化,如图4所示。浓度越高,图示颜色越深,在其中B支路和C支路之间达到峰值,而此河段也是日常水质最差的一段,氨氮对污染位置指示作用很好。
此河段的氨氮较高可能以下原因:
(1)C支路常年为劣Ⅴ水体,在此处汇入A河道;
(2)这个河段存在较多未查明的污水排放暗管。
对A河段用侧扫雷达沿河岸进行检测,发现疑似暗管的影响后,拍照记录现场情况,并记录坐标,如图5所示。
在此河段共发现疑似水下暗管三处,涵洞一处,发现暗管的位置也正是氨氮浓度较高的河段。对水下地形进行勘测,显示其中有2处淤积严重,标识为M和N,如图6所示。具体的地形模拟图如图7所示。
经过勘测有以下几个发现:
(1)测试河道地形数据,河道中央比河道两侧低;
(2)在河桥交汇处,如图6中N点位置,高程数据显示比其他区域要高,水底较高说明易形成淤泥堆积;
(3)形成淤泥堆积的原因可能是桥墩等原因导致水流不畅;
(4)积淤量比较高的区域,水质情况正好比较差,跟水体双向流通被阻碍有关。
通过无人船在A河段上的应用,成功地获取了A河段的水质分布图,将重点检测水质因子结合河床地形和暗管排查,初步分析出了A河段水质情况较差的原因。
4 结 论
无人船作为“水面机器人”具有检测速度快、定位准确、达到位置灵活等优点,是很好的水质和污染源排查工具,可以有效地应用到“智慧治水”工作中。无人船还可以结合无人机、水下机器人等最新的技术,全面地提供实时数据,为智慧治水快速提供可靠依据。
参考文献:
[1] 中华人民共和国生态环境部.水质 采样方案设计技术规定:HJ 495—2009 [S].北京:中国环境科学出版社,2010.
[2] 中华人民共和国国家测绘局.全球定位系统实时动态测量(RTK)技术规范:CH/T 2009—2010 [S].北京:测绘出版社,2010.
作者简介:陈静婷(1986.04—),女,汉族,浙江湖州人,项目经理,工程师,本科,学士学位,研究方向:智能环保。
