PWM频率对高速无刷直流电动机转矩脉动影响分析
2020-01-06胡怡婷赵朝会吉洪智建照阳
胡怡婷, 赵朝会, 吉洪智, 丁 帆, 建照阳
(上海电机学院 电气学院, 上海 201306)
高速无刷直流电动机(Brushless DC Motor, BLDCM)以其小体积、高功率密度、高效率的特点,在众多领域有广阔的应用前景[1-3]。BLDCM一般采用相电压脉冲宽度调制(Pulse Width Modulation, PWM)调速,不同的PWM调制方式对转矩脉动的影响也有所不同,其中PWM_ON_PWM调制方式具有较小的换相转矩脉动,且不会造成非导通相电流尾巴问题,因此被广泛运用[4-5]。
此外,PWM的ON和OFF会造成电流的上下脉动,使得转矩也产生与PWM同频率的脉动[6]。为减小这类转矩脉动,国内外许多学者对此做了众多研究。文献[7]通过使用拉普拉斯变换分析电路后改变输入电压来减少转矩脉动问题。文献[8-9]通过在三相逆变器前加入前级BUCK变换器,完全消除了传导区的转矩脉动,但是要加前级电路,较为复杂,成本也增加。文献[10]指出倍频PWM控制可以减小电流波动,改善电流波形。文献[11]通过理论分析并实验验证PWM开关频率不高会导致高速BLDCM滞后换相,引起电流波动。文献[10-11]都未进一步分析其对转矩的影响。文献[12]通过理论和实验验证了PWM开关频率与电磁转矩成反比关系,并做实验验证,但未对15 kHz以上的频率段进行分析。文献[13]通过仿真证明了提高PWM的频率可以有效降低电流脉动和转矩脉动。
本文采用PWM_ON_PWM调制方式,从PWM频率入手,分析其与高速BLDCM导通区和换相区转矩之间的关系。PWM频率影响电动机的转矩,随着PWM频率的升高,电流斩波更细,电流波动减小,转矩脉动减小。通过Maxwell和Simplorer软件搭建单电流闭环的联合仿真控制模型,仿真验证了上述结论,并发现当电动机速度在10 000 r/min时,在20 kHz至50 kHz频率段内,随着频率的升高,电动机转矩脉动抑制效果较为明显;在50 kHz以上,抑制效果趋于稳定。
1 PWM_ON_PWM调制方式
PWM_ON_PWM调制是新型的调制方式,在开关管导通的120°内前30°和后30° PWM斩波,中间120°常开,如图1所示。其中,S1~S6为三相桥的开关管。采用此种方法后,电动机转矩的换相转矩脉动较小,且避免了非导通相二极管续流的情况[14-15]。

图1 PWM-ON-PWM
2 PWM频率对转矩脉动的影响分析
2.1 BLDCM数学模型
为了便于分析,作出如下假设:三相定子绕组采用Y形连接且对称分布,各相绕组参数(绕组电阻与电感)大小相同,忽略其变化,磁路不会饱和,忽略电枢反应。
电压方程为
(1)

转矩方程为
(2)
式中:Te为电动机电磁转矩,N·m;Ω为转子机械转速,rad/s。
BLDCM的等效电路如图2所示。其中UDC为直流电压;VD1~VD6为反并联二极管。

图2 驱动电路及电动机等效电路
2.2 PWM控制下的电流波动
BLDCM通常采用PWM斩波控制。由于电感的存在,PWM斩波会造成电流出现上下脉动。电动机稳定运行时,当PWM周期很小时,电流波形在PWM=ON或PWM=OFF时可近似为直线,如图3所示。其中T为PWM周期,D为PWM占空比,I1和I2分别为脉动电流的最小和最大值。

图3 电感通过的电流波形
因此,电流可分解为一个直流分量和交流分量(三角波)。根据转矩式(2)可知,转矩波形也可分解为直流分量和交流分量。
2.3 导通区间转矩分析
以AB相导通时的0°至30°为例。图4所示为PWM=ON时的电流流通路径。

图4 PWM=ON时的电路
电压方程为
(3)
式中:I1为电流初值;E为反电动势的值。
A相电流的变化率为
(4)
A相电流为
(5)
图5所示为PWM=OFF时的电流流通路径。

图5 PWM=OFF时的电路
电压方程为
(6)
A相电流的变化率为
(7)
A相电流为
(8)
一个开关周期内的电流平均值为
(9)
式中:f为PWM频率。
电流脉动为
(10)
平均电磁转矩为
(11)
转矩波动为
(12)
由式(10)、式(12)可知,当电动机稳定运行时,在一个开关周期内,转矩脉动和电流脉动表达式一致。转矩脉动与PWM频率、UDC、反电动势以及占空比有关。当UDC、反电动势以及占空比值一定时,电流脉动及转矩脉动和PWM频率成反比关系。开关频率越高,电流脉动越小,电流品质提高,转矩脉动越来越小。
2.4 换相区间转矩分析
当电流从B相换相至C相时,由于电感的存在,流经B相的电流不会立即衰减到0,会通过VD3进行续流。换相开始时,下管S2进行PWM调制,其电路如图6所示。
电压方程为
(13)
式中:Is为电流初值。

图6 PWM=ON时的电路
非换相相电流的变化率为
(14)
非换相相电流为
(15)
当PWM=OFF时其电路如图7所示。

图7 PWM=OFF时的电路
其电压方程为
(16)
非换相相电流的变化率为
(17)
非换相相电流为
(18)
一个开关周期内的电流平均值为
(19)
电流脉动为
(20)
平均电磁转矩为
(21)
转矩波动为
(22)
由式(20)和式(22)可以看出,换相期间,在一个开关频率内,电流脉动和转矩脉动与PWM频率、UDC、反电动势以及占空比有关。其中,脉动与PWM频率成反比关系,随着PWM频率的升高,电流脉动和转矩脉动都会相应减少。
3 仿真分析
在恒转速10 000 r/min电流PI闭环控制下,采用PWM_ON_PWM调制方式,对不同PWM频率下电流、转矩波形进行比较分析。图8为不同频率下的电流波形。

图8 不同PWM频率下电流波形
由图8可知,当PWM频率为20 kHz,电流脉动很大,也有很多尖峰。随着PWM增大,电流逐渐趋于平稳,电流尖峰较小,电流品质提高。对于换相期间非换相相电流的跌落问题,当PWM为20 kHz时,非换相相电流最大可跌落至0 A;当PWM为40 kHz时,非换相相电流最大可跌落至1 A左右。对于PWM为60 kHz和80 kHz,两者非换相相电流最大可跌落的数值差不多。
图9为不同PWM频率段下的转矩波形,当PWM为20 kHz时,最大转矩达到0.6 N·m,上下脉动幅度很大。当PWM为40 kHz时,转矩波形明显好于PWM为20 kHz时候的波形。在非换相期间,转矩上下脉动幅度在0.1 N·m左右,换相期间转矩跌落至0.1 N·m左右。当PWM频率增至60 kHz、80 kHz时,非换相期间转矩上下波动范围比低频时小,但是两者差距不大。换相期间,这两个PWM频率下的转矩跌落值都差不多。

图9 不同PWM频率下转矩波形
为进一步分析PWM频率对转矩波动的影响,以10 kHz为间隔,进行不同PWM频率段仿真。转矩波形可分解为交流分量和直流分量,对不同PWM频率下的转矩波形处理,利用Simplorer中图形处理功能可计算脉动值。
其公式如下:
(23)
式中:Trip为转矩脉动值;Tacr为交流分量的有效值;Tm为平均值。转矩波形可分解为交流分量和直流分量,此公式利用转矩交流分量有效值与转矩平均值比值表现转矩脉动。
表1为软件算出的脉动值。

表1 转矩脉动
由表1可知,随着开关频率的增加,转矩脉动呈减小的趋势,但是其减小效果是有限度的。在20 kHz到50 kHz频率段内脉动减小显著;50 kHz后,脉动值减小趋势变缓。
4 实验分析
本文以一台高速BLDCM作为控制对象,其额定电压为310 V、额定转速为24 000 r/min、额定功率为1.2 kW。为实现高频,采用了基于碳化硅的驱动平台,主控芯片采用兆易创新的GD32F303。图10所示为控制平台。

图10 实验平台
电动机转速为10 000 r/min,采用PI双闭环PWM_ON_PWM斩波控制,PWM频率在10、20、40、60 kHz下的电流波形,如图11所示。
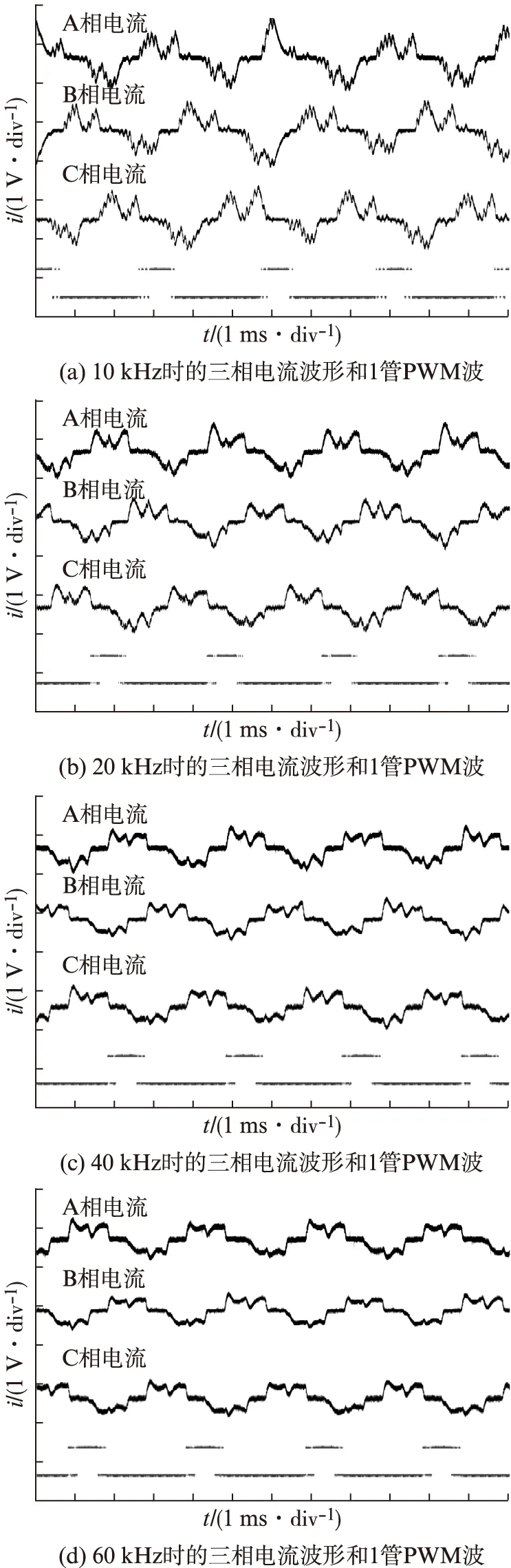
图11 10 000 r/min下不同PWM频率电流波形
控制系统中,采用霍尔电流传感器,其测量出电流值被转换为电压值。因此,图11中显示的电流波形的单位为电压单位,电流具体数值需要根据公式进行相关的换算。在10 kHz时电流上下脉动较为明显,毛刺较多。在20 kHz时电动机毛刺减小,到40 kHz和60 kHz时,基本看不出大的毛刺,变化不明显。提高PWM频率可在一定频率段内显著减小电流的上下脉动,电流品质提高,从而转矩脉动减小。当到达某一频率段后,减小幅度趋于稳定。符合上述理论分析与仿真分析。
4 结 论
本文主要研究了PWM频率与BLDCM转矩之间的关系。结合PWM_ON_PWM调制方式,分析了导通期间和换相期间PWM频率与转矩间的关系,电动机的转矩与PWM频率、直流电压、反电动势、占空比有关。PWM频率和转矩为反比关系。通过Maxwell、Simplorer进行了仿真验证,并进行驱动实验。仿真和实验均表明:增加PWM频率,可减小电流上下脉动,从而减少电动机的转矩脉动,但是其减小效果会在到达某一频率后趋于稳定。