基于自动生成技术的三维动画型微课场景设计
2020-01-05李龙
李龙


摘 要:微课作为一种新型的网络学习方式,其理论设计、开发制作以及应用创新是研究热点。当前构建三维动画型微课场景存在制作周期长、工作量大等问题。通过研究场景规划,提出一种基于模型标注与区域布局的场景设计规划方法,包括模型数据处理、预规划与计算实现几个步骤,对模型进行数据预处理与标注存储,通过基于知识的方法推导出场景预规划方案,并对模型位置进行动态计算。实验结果表明,该方法能自动生成三维动画型微课场景,场景模型位置规划正确率达到85%。
关键词:三维动画;微课;场景规划;模型标注;教育技术
DOI:10. 11907/rjdk. 201031 开放科学(资源服务)标识码(OSID):
中图分类号:TP319 文献标识码:A 文章编号:1672-7800(2020)011-0154-05
Research on 3D Animation Micro-lecture Scene Design
Based on Automatic Generation Technology
LI Long
(Distance Education Center, Party School of China Railway Taiyuan Group Co., Ltd., Taiyuan 030013, China)
Abstract: Micro-lecture is a new type of online learning. Its theoretical design, development, and application innovation have become hot research topics. At present, when constructing a 3D animation micro-lecture scene, there are problems such as a long production cycle and a large workload, which cannot be well applied to practical operations. Based on the study of scene planning, this paper proposes a method for scene design planning based on model labeling and regional layout. It includes three parts: model data processing, pre-planning and calculation. The model is preprocessed and labeled with data. The method can deduce the scenario pre-planning scheme and calculate the model position dynamically. The experimental results show that the method can automatically generate 3D animation micro-lecture scenes, and the accuracy rate of scene model location planning reaches 85%.
Key Words:3D animation; micro-lecture; scence planning; model label; educational technology
0 引言
微課作为一种新型教学教育课程,集合了互联网、虚拟现实、视频制作、互动录播等众多技术手段为一体。微课(Micro-lecture)概念最早由美国墨西哥州圣胡安学院的David[1]提出,他综合了美国北爱荷华大学Leroy[2]提出的60秒课程(60-Second Course)以及英国纳皮尔大学Kee[3]提出的一分钟演讲(One Minute Lecture),认为微课通过将授课内容与教学目标相结合,可在短时间内为学习者提供精炼的学习资源。随着“互联网+教育”发展,微课在教育教学领域扮演越来越重要角色。
传统的动画型微课由于不受时间、空间、地点限制,可将复杂、抽象的概念通过简化、夸张与拟人化手法形象化和具体化,使微课内容更加生动,展示与讲解效果更好[4]。根据技术手段不同,动画型微课分为二维动画型微课与三维动画型微课。三维动画型微课比二维动画型微课画面更具有立体感与深度感,模拟场景与制作效果更加逼真,但在构建动画场景时难度较大,制作效率低,操作更为复杂。因此,如何保证三维动画型微课场景制作质量,提高制作效率,形成一种新型制作技术架构,解决在教育教学中普及三维动画型微课问题,是本文研究重点。
1 相关工作
传统动画通常先用画笔画出静止手稿,通过摄影机进行连续拍摄,从视觉感官上产生连续变化效果。为进一步提高动画制作效率,20世纪90年代,中国科学院陆汝钤等[5]提出计算机全过程辅助动画自动生成技术。该技术将人工智能、图形学技术、电影艺术等引入动画制作全过程,实现从文本到动画的自动生成。采用该系统制作的动画《三兄弟》在中央电视台播放,验证动画自动生成技术可行。Shim等[6]提出基于自动Agents的短故事生成技术;GervAas等[7]设计自动生成故事系统,在Ontology知识库中构建已有故事情节脚本,通过事件推理法在知识网络中形成基本情节;随着智能手机的普及,杨勇[8]于2008年提出将动画自动生成技术应用于手机短信,设计并实现面向手机短信的3D动画自动生成系统。系统通过分析手机短信文本,自动生成符合短信内容的动画并发送给接收方;曹存根等[9]开发基于知识的PNAI系统,为计算机动画生成提供支持; 2015年,阎思瑶等[10]以中国古典诗词为研究对象,将自然语言处理、计算机动画与古诗词等相关研究成果结合,研发古诗词动画自动生成系统。
场景规划作为计算机动画创作的重要环节,研究难点是搭建适当且合理的场景。在构建场景时各个模型规划不是简单的物体码放,除了计算当前空间区域是否合适,还需要考虑物体之间的性质与关系。场景自动生成技术相关研究有:Smith[11]在三维场景中通过几何约束对物体进行规划摆放;Xu[12]提出一种基于约束的自动布局方法,并在此基础上研制CAPS系统。该系统通过语义网技术对物体间的位置关系进行约束,在场景中自动引导物体摆放;Vassias[13]通过预设约束条件,采用遗传算法对场景布局进行求解,设计MultiCAD-GA系统。
本文提出将自动生成技术引入三维动画型微课场景制作中。考虑微课场景中各模型不是简单的物体码放,除了计算当前空间区域是否合适,还要考虑物体之间存在的性质与关系。因此,与上述研究相比,本文提出一种基于模型标注与区域布局的场景设计规划方法,包括模型数据处理、预规划与计算实现3部分。在模型数据处理阶段对场景及模型进行处理,对模型、场景位置、朝向及中心点进行规范化处理,同时对可用空间(指可以进行场景规划的空间)进行划分,建立模型与模型之间、场景与模型之间的关联关系,对有用信息进行标注存储;预规划阶段通过相似性深度搜索选择合适的微课场景以及候选添加模型,给出初步摆放方案;计算实现阶段依据预规划结果进行场景规划计算,对场景内所添模型位置进行动态计算,使模型摆放位置合理,提高三维动画型微课场景自动生成的多样性。
2 系统整体设计
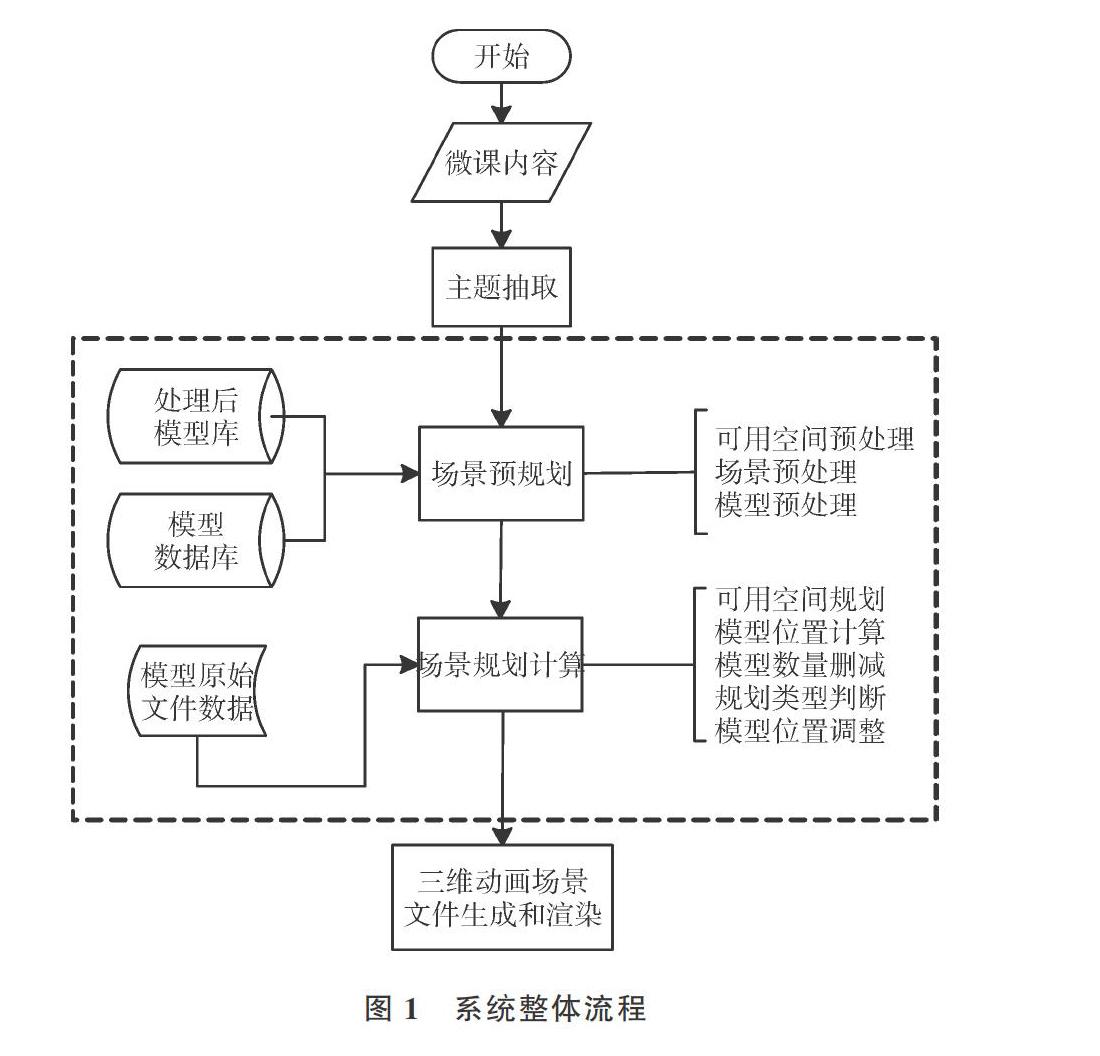
为满足功能需求,提高三维动画型微课制作效率,降低开发成本,设计基于模型标注与区域布局的场景规划系统,整体流程如图1所示。系统通过场景规划库读取场景信息,在预规划阶段得到与当前场景相吻合的场景元素(模型)并对其进行布局规划设计;在计算实现阶段根据预处理结果将其转化为具体数值,依据实际情况对场景与模型进行添加修改,动态规划模型位置及布局,最后调用Maya API生成三维动画场景原始文件。
3 预规划设计
3.1 场景与模型预处理
场景与模型数据处理是数据存储与后期场景规划计算的基础。基于数据重用性原理,为方便在预规划阶段对场景进行布局及计算实现阶段读取数据,需要建立场景库与模型库存放场景与模型实例(实例保存为Maya文件),并对场景与模型进行统一规范化处理,具体包括命名规范化与位置规范化。命名规范化对象包括场景、模型及可用空间,场景名称统一以”S_”开头,模型名称统一以“M_”开头,可用空间名称统一以”SP_”开头,图2(a)为场景M_coffeehome大纲视图;位置规范化指获取原始场景及模型长、宽、高、位置朝向后,通过计算获取中心点、旋转值及包围盒大小,调用Maya API对场景与模型进行位置移动旋转。图2(b)为模型M_desk.ma的侧视图。
3.2 数据标注存储
建立数据库存储预处理后的场景与模型实例并刻画彼此之间的关系。本文通过关系型数据库进行存储,设计主题表、可用空间类型表、场景表、模型表、场景模型关系表、模型信息标注表以及布局规划表。
可用空间类型表主要存储可用空间类型,包括地面可用空间、空中可用空间、水面可用空间,地面可用空间分为室内、室外地面可用空间,空中可用空间分为高空、低空可用空间。
场景表主要存储場景实例信息,包括名称、存放类型、适用情形、位置信息、旋转值信息、包围盒大小等。
模型表主要存储模型实例信息,包括名称、类型、位置信息、旋转值信息、包围盒大小、关联动作、可被支撑场景元素等。
场景模型关联表主要存储与场景相关联的模型实例。
模型信息标注表存储模型之间的关联关系,包括约束关系、依赖关系、组成关系以及互斥关系等。
布局规划表存储布局规划类型,包括线性规划、三角形规划与正方形规划。
3.3 预规划遵循策略
三维动画型微课预规划设计阶段,以场景模型实例库、数据库为基础,根据微课类型确定微课主题,通过主题确定候选场景,通过原子信息(微课内容关键点)推导出与当前场景相适应的模型信息并对其进行布局规划。预规划阶段遵循策略:
(1)查看微课主题在场景库及模型库中是否存在与其相关联的主题信息,若存在则根据当前主题推出与之相符合的候选场景并保存;没有主题情况下根据微课内容的原子信息判断场景库是否存在与其相关联的场景实例,如果存在则对其处理并将信息保存。
(2)分析保存的候选场景信息,对模型表及场景模型关联表进行相似性搜索,确定候选模型信息,在模型信息标注表中查看,确定其是否存在约束关系,然后保存上述信息。
(3)确定场景的可用空间类型,根据模型类型及布局规划表对候选模型进行布局规划,确定场景可用空间、所添加模型布局规划,对规划信息进行保存并输出预规划文档。
预规划阶段的输出结果以xml格式保存,文档内容包括微课主题、场景信息、模型信息、模型数量、可用空间名称、布局规划类型、关联关系、关联模型等信息。预规划结果各参数描述如表1所示。
4 计算实现
计算实现是三维动画型微课场景规划最重要的部分,计算结果直接影响场景布局规划效果好坏。当场景进行规划时,需要将所添加模型放入场景的可用空间进行规划。模型布局规划不同于简单的物品码放,不仅要考虑模型自身性质,还要考虑模型与场景、模型与模型之间的位置关系与关联关系,而且要针对各模型所属种类的不同设置不同的布局规划方式(当前规划方式分为线性规划、三角形规划与正方形规划)与之相适应。因此,要针对预规划设计阶段规则完成解析并采用对应策略实现计算。
对模型位置设定如下条件:①可行性。模型位置规划结果应当与预规划属性信息相符合;②条件性。模型位置选择应该位于场景的可用空间内,不能放置在非场景模型可用空间且模型之间不能互相重合;③可操作性。由于模型之间存在依赖关系,因此在模型放置过程中,当出现所添加模型较多导致预规划阶段模型放置出错时,可通过对当前模型之间存在的关系优先级进行判断,对模型进行适当删减;④多样性。模型位置布局应避免重复,位置点需在保证场景规划成功的基础上选取随机区域、随机位置,从而保证同一种预规划设计经过多次场景规划生成的微课动画场景不完全相同,使动画的多样性更为丰富。
对模型位置规划首先需要考虑模型间的位置关系及规划类型。首先统计当前场景可用空间信息及预规划设计待添加模型信息,将模型根据关联关系划分到不同的可用空间区域中,具有空间位置一致性模型会划分到同一区域中。若存在组成关系,则需要统一考虑具有层叠性质模型,之后对每个可用空间摆放的模型进行规划,给出所有摆放方案并进行存放。模型位置规划算法如下:
输入:场景预规划文档信息
输出:模型位置
Begin
(1)获取当前场景中可用空间位置大小信息,将这些信息加入可用空间序列listSpace(m)中,m∈{mn,n∈Z+}
(2)统计当前场景待添加模型信息,存储模型名称、包围盒大小、位置及旋转信息,并根据预规划设计文档得到模型之间的关联关系associatedType及交互模型interactionModel,将这些信息加入模型集合modelMap(modelName,infoJson)中,统计所添模型类型个数n
(3)判断预规划信息文档中模型之间的位置关系,将所添模型划分到不同的可用空间中
(4)判断可用空间数量m、模型类型个数n以及规划类型,对需要进行场景规划的执行第(5)步,否则执行第(26)步规划结束
(5)for 可用空间序列listSpace //删除超过可用空间大小的模型
(6) for 模型集合modelMap
(7) if 模型包围盒大小超出可用空间尺寸范围
(8) 从modelMap中删除此模型信息
(9)读取预规划文档中的场景规划类型,开始向可用空间区域内放置模型
(10) 获得需要添加的模型interactionModel,获得其包围盒大小及位置信息
(11) if 关联关系类型为组成关系 //组成关系处理
(12) 對组成层叠关系的下层模型按照场景规划效果与可用空间形状计算模型位置
(13) if 场景规划结果满足模型可用空间要求
(14) 保存这条场景规划结果
(15) else
(16) 减少可用空间内模型放置数量或移除部分模型(包括与其相关联的交互模型)
(17) 将修改或删除信息在mdelMap更新,转到步骤(9)
(18) else
(19) 判断interactionModel中是否为空,若不为空则将该模型信息加入modelMap中
(20)for 可用空间序列listSpace //模型位置计算
(21) for 该空间可使用的布局类型
(22) 根據布局效果调整模型放置顺序
(23) 根据可用空间形状计算模型的相对位置与朝向
(24) 保存当前布局结果并将可用空间剩余大小存入listSpace(m)中
(25)将所有区域组合放入可用空间中
(26)//所有可用空间场景规划完成
End
5 实验
本文模型数据来源于网络共享资源,针对当前实验采用1×1个单位网格作为基本长度单位进行计算。测试环境包括硬件与软件两部分,硬件设备为Inter(R) Core(R) i5-2400 CPU @ 3.10GHZ台式机,内存16GB;软件包括64位Windows操作系统、Maya 2009、Eclipse、VisualStudio 2008、MySQL等。
以《家庭介绍》微课内容为例,选取其中部分场景设计信息,预规划xml文件如下:
该预规划信息表示在M_room场景下进行规划设计,其中预规划信息如下: 添加了两把椅子(M_chair),规划方式为线性规划,关联模型为M_table,放置的可用空间为SP_room1_A;添加一张桌子(M_table),规划方式为随机规划,关联类型为组成关系,关联模型为M_chair,放置的可用空间为SP_room1_A;添加两个茶杯(M_cup)与一个托盘(M_tray),规划方式为三角形规划,关联类型为层叠关系,关联模型为M_table,放置的可用空间为SP_room1_A;添加一个抱枕(M_pillow),规划方式为线性规划,关联类型为层叠依赖关系,关联模型为M_ sofa,放置的可用空间为SP_room1_B。动画生成效果如图3(a)、图3(b)所示。
6 结语
本文研究了三维动画型微课制作中场景自动规划问题。首先使用基于模型标注的方法对模型进行预处理及数据标注,建立模型库并对模型基本信息、关联关系进行存储,之后判断并获取微课主题及微课原子信息,通过相似性深度搜索选择适用于微课内容的场景及候选添加模型,在预规划阶段给出场景规划方案并动态计算模型摆放位置,最终实现三维动画型微课场景自动生成规划。目前,三维动画型微课场景规划自动生成系统还处于测试阶段,由于模型信息使用MySql数据库存储,在处理模型属性及构建关系时有所限制,为此后续考虑引入本体编辑和知识获取的Protégé软件[14]。目前微课主题获取需要人工判断,场景预规划效果受主观因素影响较大,场景动画生成效率不高,因此需在后续添加信息抽取功能,以保证主题及原子信息抽取准确率。
参考文献:
[1] DAVID S. These lectures are gone in 60 seconds[D]. The Chronicle of Higher Education,2009.
[2] LEROY A, MCGREW. A 60-second course in organic chemistry[J]. Journal of Chemical Education,1993(6):1020-1031.
[3] KEE T P. The one minute lecture[D]. Education in Chemistry,1995.
[4] 李洋. 三維虚拟学习环境中课堂教学设计研究[D]. 宁波:宁波大学,2018.
[5] 陆汝钤, 张松懋. 从故事到动画片——全过程计算机辅助动画自动生成[J]. 自动化学报, 2002, 28(3):321-348.
[6] SHIM Y,KIM M. Automatic short story generator based on autonomous agents[C]. Pacific Rim International Workshop on Multi-Agents. Springer Berlin Heidelberg, 2002:151-162.
[7] GERVáS P, DíAZ-AGUDO B, PEINADO F, et al. Story plot generation based on CBR[J]. Knowledge-Based Systems,2005,18(4):235-242.
[8] 杨勇. 手机3D动画中虚拟人物交互运动的自动规划[D]. 北京:北京工业大学,2018.
[9] 曹存根,李良君,李志豪,等. 智能动画创作系统PNAI的研究进展[J]. 系统科学与数学,2008,28(11):1407-1431.
[10] 阎思瑶,郑旭玲,史晓东,等. 古典诗词动画自动生成研究[J]. 北京大学学报(自然科学版),2015,51(2):255-261.
[11] SMITH G,WOLFGANG STüRZLINGER, SALZMAN T D. Scene manipulation with 2D devices and constraints[C]. Graphics Interface, Canadian Information Processing Society, 2001.
[12] XU K,STEWART J,FIUME E. Constraint-based automatic placement for scene composition[J]. Proceedings of Graphics Interface,2002(2):25-34.
[13] VASSILAS N,MIAOULIS G,CHRONOPOULOS D,et al. MultiCAD-GA: a system for the design of 3D forms based on genetic algorithms and human evaluation[J]. Knowledge Representation & Reasoning,2002(851):2014-2021.
[14] 白卫静,张松懋,刘椿年. 中国古建的语义网络知识库及其高效实现[J]. 智能系统学报,2010,5(6):510-521.
(责任编辑:杜能钢)
0 引言
随着现代民用飞机飞行包线不断扩大,特别是国内某些干线航线紧张,民机逐步向高空高速发展。飞行控制律作为飞机的“灵魂”,直接影响飞机安全性和舒适性[1-2]。飞行控制系统设计是我国大型客机研制过程中的关键技术之一,对于提高飞机性能、飞行安全以及减轻驾驶员工作负荷至关重要[3-4]。
王永[5]分析了我国民机飞控系统研制与西方国家的差距,提出我国大型客机研发需要在增强可靠性与安全性、提高适航取证能力、降低成本、发展多层次系统化的飞控产品等方面有所突破。面对与日俱增的市场需求,加上日趋明显的欧美技术封锁,研制出具有自主知识产权的大型客机飞行控制系统刻不容缓[6-9]。日前,中国商飞正充分争取全球资源,集全国之力发展大型客机项目,本文来源于民机飞行控制律设计相关项目,对我国大型客机研制具有一定参考意义。
1 研究对象
本文以某大型民机为研究对象,利用经典方程描述飞机的动力学和运动学模型,选取12个状态变量,其它变量通过这12个变量导出求得。选取典型巡航状态的配平点,在配平点附近通过小扰动线性化方法得到线性模型。纵向控制律基于线性模型而设计。本体模型架构如图1所示。
2 特征结构配置方法
特征结构配置方法在民机飞行控制系统中应用十分广泛,特征根可以改善系统响应的动态特性,特征向量可以对系统进行动态响应解耦,通常综合配置特征根和特征向量使系统达到预期响应[11-14]。一般地,线性时不变系统的状态方程如下:
x=Ax+Buy=Cx
其中,A∈Rn×n,B∈Rn×m,C∈Rp×n,n为飞机状态变量个数,p为观测输出个数,m为系统输入个数。
特征结构配置可以概述为:针对给定的自共轭标量集{λdi}和对应的自共轭n维向量集{vdi},确定一个m×n维实数矩阵K,使得A+BK的特征值与共轭标量集{λdi}一致,其对应的特征向量与n维向量集{vdi}一致。
kp=(ω2inv-ω2cmd)/kinvω2invkd=(2ζinvωinv-2ζcmdωcmd)/kinvω2invkff=ω2cmd/kinvω2inv (6)
控制系统在该配平点附近的短周期法相过载响应伯德图如图4所示,为频率范围从0.1rad/s到1.5倍的飞机短周期模态响应频率。
3.5 反馈通道及参数配置
反馈通道可以改善系统的阻尼特性和短周期频率,反馈信号采用飞机法相过载反馈nz,但实际上nz是根据迎角信号αz转化得到的,nz反馈可以提高飞机系统本身的静稳定性,同时也能满足系统对于阻尼特性和短周期频率的要求。其中,控制系统反馈模块如图5所示。
其中,αnz是在短周期运动模态中,迎角和法相过载之间的转换系数,具体表达式如式(7)所示。
αnz=αn=VgZα (7)
迎角速率信号α可以通过飞机的俯仰角速率q经过一定转换得到,具体表达式如式(8)所示。
α=q+gcos?cosθcosα+sinθsinα-nzU (8)
对于巡航平稳飞行状态,俯仰角θ与迎角α相等,且法相过载nz为1,因此迎角速率α等于俯仰角速率q。
通过αnz可以将法相过载指令nz和法相过载变化率指令nz转化为迎角指令信号α和α,然后与飞机本体的迎角反馈和迎角变化率反馈信号作差,再乘以适当的反馈增益系数Kα和Kα,对这两条反馈通路求和,共同组成了反馈信号指令,这也是常规意义下的比例—积分(PI)控制环节。
反馈通道的反馈增益K可以采用特征根结构配置方法求得。系统短周期运动模态特征根为-0.722 9±1.604 9i,阻尼比为0.410 7。由GJB185-86一级标准规定,最小无阻尼自振频率不小于1.0,阻尼比不小于0.19。Nz控制律设计主要针对飞机的短周期运动模态而言,选择短周期运动特征根为-0.8±0.8i,阻尼比选择为0.707。
则期望的特征值如式(9)所示。
λd=-0.8+0.8i -0.8-0.8i * * (9)
状态反馈的控制律u = -Kx+v,具有期望特征值的闭环系统特征多项式为:
f(λ*)=(λ*+0.8-0.8i)(λ*+0.8+0.8i)
取K=kα,kα,则设计的闭环系统特征多项式为:f(λ)=|λI-A+BK|,然后由f(λ*)=|f(λ)|,通过求解该方程即可得到反馈增益矩阵K=-1.762 6,0.197 4,*,*,该增益矩阵可以保证闭环系统的特征值为期望值。
3.6 仿真验证分析
基于上述方法得到控制律,利用MATLAB的Simulink在配平点附近搭建线性数学模型,并进行线性仿真分析。在单位方波输入下,模型输出如图6所示。可以看出在Nz控制架构下,飞机法相加速度响应效果良好,且超调量较小,当飞行员撤销驾驶杆指令输入时,飞机也能很快进入稳态。
将在该平衡点附近设计的控制律应用于非线性六自由度模型,观察飞机在该平衡点附近的响应,并通过俯仰角速律q响应准则评价控制方案的品质效果,巡航飞行速度为100m/s,飞机俯仰角速率响应曲线如图7所示。
根据图7俯仰角速率q在Nz控制器下的单位阶跃输出曲线,结合俯仰角速率响应准则,检验控制器效果。
(1)有效延迟时间t1≈0.05,可以满足1级飞行品质要求。
1级:t1≤ 0.12 s;2级:t1≤ 0.17 s;3级:t1≤ 0.21。
(2)瞬态峰值比(Δq2/Δq1)max≤0.1,可以满足1级飞行品质要求。
1级:(Δq2/Δq1)max≤0.3;2级:(Δq2/Δq1)max≤0.6;3级:(Δq2/Δq1)max≤0.915。
(3)有效上升时间Δt≈ 0.2,同样满足终端飞行阶段1级飞行品质要求。
级别 非终端飞行 终端飞行 1级 9/V0≤Δt≤500/V0 9/V0≤Δt≤200/V0 2级 3.2/V0≤Δt≤1 600/V0 3.2/V0≤Δt≤645/V0
式中,V0为真空速(m/s),配平点巡航飞行速度为100m/s。
综上所述,设计的Nz控制器可以满足俯仰角速率准则1级飞行品质要求,设计的Nz控制器可以满足设计指标,达到预期效果。
4 结语
以上研究表明,采用特征结构配置法设计的纵向飞行控制律具有良好控制效果,响应平滑迅速,可以达到俯仰角速率1级飞行品质要求。此外,通过特征结构配置方法可以一次性求得所需反馈增益系数,缩短了控制律设计时间,提高了效率。但是存在的问题是,采用特征结构配置方法进行控制律设计时,无法预测未配置极点的最终状态,因此可能变得非常不稳定,或者某些闭环极点阻尼太小。这种情况下,需要改变特征值重新设计,从而达到预期目标。通常情况下,大多数理想的闭环极点与开环极点差异不大,因此未配置的极点稳定性也不会造成很大问题。
参考文献:
[1] 朱妍,景海峰,高亚奎. 空客飞机电传控制律设计分析[C]. 深圳:中國航空学会2007年学术年会,2007.
[2] 邵荣士. YF-16电传操纵系统控制律分析[J]. 飞机设计,1998,19(4):26-34.
[3] 姚子羽. 大型商用民航飞机振动故障控制律研究与设计[J]. 系统仿真学报,2015,27(2):295-302.
[4] 吴胜亮. 民用飞机控制律设计与飞行品质评估试验方案研究[J]. 软件导刊,2017,16(8):160-163.
[5] 王永. 民机飞控系统的发展思路研究[J]. 系统仿真学报,2009,20(S2):200-204.
[6] 杜金刚. 基于动态逆方法的飞行控制系统设计与仿真[D]. 西安:西北工业大学,2006.
[7] 谢陵. 民用飞机控制律设计系统工程过程研究[J]. 软件导刊,2015,14(5):41-43.
[8] 李欣. 大型客机自动飞行控制律研究[D]. 南京:南京航空航天大学,2013.
[9] 周蜜. A320飞机电传操纵系统的控制律及其重构浅析[J]. 科技风,2016,29(12):12-13.
[10] ANON.Flight control design-best practice[R]. NATO RTO-TR-029,2000.
[11] PRATT R W. Flight control system[J]. AIAA Progress in Astronautics and Aeronautics,2000(184):375-382.
[12] ANON.Flying qualities of piloted aircraft[S]. MIL-STD-1797B, Department of Defense Interface Standard,2006.
[13] TISCHLERY M B,TOM BERGER.Longitudinal control law design and handling qualities optimization for a business jet flight control system[Z]. 2014.
[14] 楊玉蕾. 民机自动飞行系统工作模式研究[D]. 南京:南京航空航天大学,2012.
[15] 姬猛. 推力不对称时民机飞行控制律重构技术研究[D]. 南京:南京航空航天大学,2011.
[16] 周立冬. 无人直升机前飞状态飞行控制律设计技术研究[D]. 南京:南京航空航天大学,2011.
[17] 李乐尧,李俨,王新民. 放宽静稳定性大型客机纵向控制增稳系统设计[J]. 飞行力学,2010,28(4):25-28.
[18] 张平,张明峰,陈宗基. 民机电传飞控系统适航安全舒适性要求初探[J]. 系统仿真学报,2008,20(S2):216-219,228.
[19] 王美仙,李明,张子军. 飞行器控制律设计方法发展综述[J]. 飞行力学,2007,25(2):1-4.
[20] 欧阳绍修,刘振钦. 大型运输机横航向飞行品质要求探讨[J]. 飞行力学,2007,25(1):12-14.
[21] 王会,李绍燕,陈宗基. 基于μ综合方法的运输机纵向自动着陆控制律[J]. 北京航空航天大学学报,2003,48(12):1059-1063.
[22] 周其焕. 民用飞机自动飞行控制系统的发展(上)[J]. 航空电子技术,2001,32(4):43-47.
[23] 杨一栋,牛佩翼,江浩. 飞行控制系统模态转换瞬变抑制技术的研究[J]. 航空学报,1990,26(1):88-92.
(责任编辑:孙 娟)
