大型民机系统纵向Nz控制律设计
2020-01-05张翰谢殿煌
张翰 谢殿煌


摘 要:针对国内民机系统纵向稳定性较差、飞机纵向短周期模态响应稳定性不足等问题,以某大型民机为研究对象,基于特征结构配置方法,利用逆模型的思路确定控制系统前馈增益系数,并基于某典型配平状态点,利用线性模型设计该飞机纵向控制律。线性仿真分析中,利用俯仰角速率q响应准则评价控制方案效果。仿真结果表明,采用特征结构配置方法设计的纵向飞行控制律具有良好控制效果,可以改善系统飞行品质使其达到一级飞行品质要求,相比于经典控制理论,通过特征结构配置方法进行纵向Nz控制律设计可以一次性确定反馈增益系数,缩短控制律设计时间。
关键词:民机飞控系统;纵向控制律;特征结构配置;线性仿真分析;飞行品质
DOI:10. 11907/rjdk. 201261 開放科学(资源服务)标识码(OSID):
中图分类号:TP319 文献标识码:A 文章编号:1672-7800(2020)011-0150-04
Longitudinal Nz Control Law Design for the Large Civil Aircraft System
ZHANG Han,XIE Dian-huang
(State Key Laboratory of Civil Aircraft Flight Simulation, Commercial Aircraft Corporation of China, Shanghai 201210, China)
Abstract: Aiming at the problems of poor longitudinal stability of domestic civil aircraft system and insufficient longitudinal short period modal response stability of aircraft, this paper takes a large civil aircraft as the research object, studies the method based on characteristic structure configuration, and uses the idea of inverse model to determine the feedforward gain coefficient of control system. Besides, based on a typical trim state point, the longitudinal control law of the aircraft is designed by using the linear model. Through the linear simulation analysis, the quality effect of the control scheme is evaluated by using the pitch rate q response criterion. The simulation results show that the longitudinal flight control law designed by eigenstructure configuration method has good control effect and can improve the flight quality of the system to meet the requirements of the first level flight quality. Especially, compared with the traditional control theory, the feedback gain coefficient can be determined once and the design time of the control law can be shortened.
Key Words:civil aircraft flight control system; longitudinal control law; eigenstructure configuration; linear simulation analysis; flight quality
0 引言
随着现代民用飞机飞行包线不断扩大,特别是国内某些干线航线紧张,民机逐步向高空高速发展。飞行控制律作为飞机的“灵魂”,直接影响飞机安全性和舒适性[1-2]。飞行控制系统设计是我国大型客机研制过程中的关键技术之一,对于提高飞机性能、飞行安全以及减轻驾驶员工作负荷至关重要[3-4]。
王永[5]分析了我国民机飞控系统研制与西方国家的差距,提出我国大型客机研发需要在增强可靠性与安全性、提高适航取证能力、降低成本、发展多层次系统化的飞控产品等方面有所突破。面对与日俱增的市场需求,加上日趋明显的欧美技术封锁,研制出具有自主知识产权的大型客机飞行控制系统刻不容缓[6-9]。日前,中国商飞正充分争取全球资源,集全国之力发展大型客机项目,本文来源于民机飞行控制律设计相关项目,对我国大型客机研制具有一定参考意义。
1 研究对象
本文以某大型民机为研究对象,利用经典方程描述飞机的动力学和运动学模型,选取12个状态变量,其它变量通过这12个变量导出求得。选取典型巡航状态的配平点,在配平点附近通过小扰动线性化方法得到线性模型。纵向控制律基于线性模型而设计。本体模型架构如图1所示。
2 特征结构配置方法
特征结构配置方法在民机飞行控制系统中应用十分广泛,特征根可以改善系统响应的动态特性,特征向量可以对系统进行动态响应解耦,通常综合配置特征根和特征向量使系统达到预期响应[11-14]。一般地,线性时不变系统的状态方程如下:
x=Ax+Buy=Cx
其中,A∈Rn×n,B∈Rn×m,C∈Rp×n,n為飞机状态变量个数,p为观测输出个数,m为系统输入个数。
特征结构配置可以概述为:针对给定的自共轭标量集{λdi}和对应的自共轭n维向量集{vdi},确定一个m×n维实数矩阵K,使得A+BK的特征值与共轭标量集{λdi}一致,其对应的特征向量与n维向量集{vdi}一致。
基于状态反馈的控制原理结构如图2所示,反馈增益矩阵K中各元素的正负需要根据反馈信号的极性确定,计算时以u=Kx加以处理。
基于Moore的研究表明,若系统可控,则特征向量需满足以下3个条件:
当且仅当对于每个i有:①{vdi}ni=1为复域Cn中的一组相互独立的特征向量;②当λi=λ*i时,vi=v*i;③vi∈span{Nλi}。
可求得反馈矩阵的增益矩阵为:K=-Mλ1z1 -Mλizi ? -Mλnznv1 vi ? vn-1,当rank(B)=m时,反馈矩阵K存在且唯一[10]。
3 纵向NzU控制律设计
3.1 Nz控制律
Nz控制属于闭环控制,可以提高操纵指令性和飞机稳定性,使姿态控制更加精准,具有中性速度稳定性,指驾驶杆处于中立位置时,在飞行速度改变情况下,通过纵向控制律的积分模块自动配平飞机,最终达到平飞过载,极大地减轻了飞行员的负担,同时提高了飞行员的舒适性[15-16]。
Nz控制律和国外部分机型采用的C*控制律均具有中性速度稳定性,C*信号是俯仰角速率和法相过载信号的综合,飞机在低速飞行状态下,俯仰角速率变化幅度较大,飞行员主要按照飞机的俯仰角速率进行操纵;而在高速飞行状态下,飞机法相过载变化幅度较大,飞行员主要按照法相过载对飞机进行操控[17]。C*信号表示如式(1)所示。
C*=nz+Vcog·q (1)
Nz控制律和C*控制律均可以实现对飞机纵向姿态的精准控制,由于国内关于C*控制的研究文献相对较少,可供参考的型号经验有限,而目前Nz控制律已经初步在民机领域上得到了应用,因此选用Nz控制律进行设计。
3.2 配平与线性化
基于搭建好的六自由度非线性模型,利用MATLAB自带的Trim函数和Linmod函数进行线性化及配平,依据某典型配平状态点确定飞机系统在该配平点附近的线性化状态矩阵为:
Alon=-0.96-0.001 9401-8.801-0.019 6-9.8100001-2.6617.0e-05 -3.57e-15-0.476,Blon=-0.023 6-0.004 20.61154.00300-1.0420.053 1
系统的特征根、阻尼比以及固有频率等自然特性如表1所示。
其中,状态变量选取了迎角α、飞行速度V、俯仰角θ和俯仰角速率q,x=α,V,θ,qT;控制输入为升降舵偏度和油门杆开度,u=δe, δTT。
3.3 纵向Nz控制架构
考虑到仅采用C*增稳控制其评价效果与飞行员评估之间相关性不强,控制效果不理想,且常规飞行控制系统中不能同时兼顾飞行稳定性和操纵性,通过设计Nz控制增稳系统可以同时兼顾以上两个方面[18-21]。纵向控制增稳结构如图3所示。
该控制框图主要包括4个控制模块:指令模型、反馈模型、执行机构和飞机本体模型。
3.4 前馈通道及参数配置
前馈通道从飞行员杆力指令输入出发,分成3部分:其中一条前馈通道直接乘上增益Kff,传给作动器,驱动舵面偏转,这会使飞机具有快的响应速度;另外两条前馈通道经由指令模型(通常可以采用适合的二阶系统模型),形成法相过载指令nzcmd和法相过载变化率指令nzcmd,然后分别乘以前馈增益Kd和Kp,与第一条前馈通道相加共同组成升降舵前馈指令信号,相比于常规直接由驾驶杆指令到舵面作动器,可以提高飞行品质。
3.4.1 指令模型
指令模型是控制系统架构中前馈通道的重要组成部分,可以看作是一个前置滤波器,指令模型能够为系统提供合适的指令信号。本文研究的控制架构是将飞行员的杆力操纵指令转化为法相过载指令和法相过载变化率指令,从而使系统更好地响应飞行员操纵指令,满足操纵品质的要求,可以进一步扩大飞机的飞行包线[22-23]。本文研究的指令模型形式如式(2)所示。
nz_cmdδstk=ω2cmds2+2ζcmds+ω2cmd (2)
其中,zcmd取值1.0,可以使系统具有良好的阻尼特性,ωcmd=ωsp,可以使系统具有良好的短周期频率特性,也可以保证升降舵作动器作动平稳,本文指令模型如式(3)所示。
nz_cmdδstk=3.098 3s2+3.520 4s+3.098 3 (3)
通常而言,短周期频率是在不同的配平状态点进行配置得到。由图3控制框图可以看出,通过指令模型输出的法相过载指令nzcmd和法相过载变化率指令nzcmd通过前馈系数Kd和Kp传输给升降舵作动器。此外,杆力指令通过前馈参数Kff,输入到升降舵作动器,驱动升降舵舵面偏转。其中,从飞行员杆力指令输入到指令模型的前馈增益Kstick取值为1/50 lb/g(磅每牛顿)。
3.4.2 前馈参数
前馈参数有Kd、Kp和Kff,与常规求解或定义前馈参数的方法不同,本文通过定义一个等效的低阶二阶逆模型,进行前馈参数反求解。等效逆模型定义的二阶传递函数如式(4)所示。
nzδele=Kinve-τinvss2+2ζinvωinvs+ω2inv (4)
巡航状态下配平点附近的法相过载响应经过解耦简化处理后的传递函数如式(5)所示。
Δnz(s)Δδe(s)=-0.229 s - 10.238s2+1.436s+3.118 (5)
通过逆模型各项参数和指令模型各项参数,可以确定3个前馈增益系数如式(6)所示。
kp=(ω2inv-ω2cmd)/kinvω2invkd=(2ζinvωinv-2ζcmdωcmd)/kinvω2invkff=ω2cmd/kinvω2inv (6)
控制系统在该配平点附近的短周期法相过载响应伯德图如图4所示,为频率范围从0.1rad/s到1.5倍的飞机短周期模态响应频率。
3.5 反馈通道及参数配置
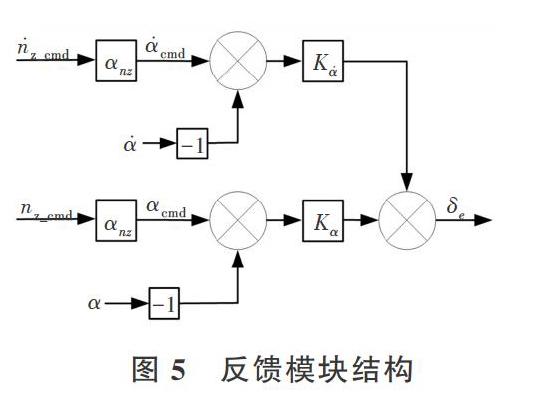
反馈通道可以改善系统的阻尼特性和短周期频率,反馈信号采用飞机法相过载反馈nz,但实际上nz是根据迎角信号αz转化得到的,nz反馈可以提高飞机系统本身的静稳定性,同时也能满足系统对于阻尼特性和短周期频率的要求。其中,控制系统反馈模块如图5所示。
其中,αnz是在短周期运动模态中,迎角和法相过载之间的转换系数,具体表达式如式(7)所示。
αnz=αn=VgZα (7)
迎角速率信号α可以通过飞机的俯仰角速率q经过一定转换得到,具体表达式如式(8)所示。
α=q+gcos?cosθcosα+sinθsinα-nzU (8)
对于巡航平稳飞行状态,俯仰角θ与迎角α相等,且法相过载nz为1,因此迎角速率α等于俯仰角速率q。
通过αnz可以将法相过载指令nz和法相过载变化率指令nz转化为迎角指令信号α和α,然后与飞机本体的迎角反馈和迎角变化率反馈信号作差,再乘以适当的反馈增益系数Kα和Kα,对这两条反馈通路求和,共同组成了反馈信号指令,这也是常规意义下的比例—积分(PI)控制环节。
反馈通道的反馈增益K可以采用特征根结构配置方法求得。系统短周期运动模态特征根为-0.722 9±1.604 9i,阻尼比为0.410 7。由GJB185-86一级标准规定,最小无阻尼自振频率不小于1.0,阻尼比不小于0.19。Nz控制律設计主要针对飞机的短周期运动模态而言,选择短周期运动特征根为-0.8±0.8i,阻尼比选择为0.707。
则期望的特征值如式(9)所示。
λd=-0.8+0.8i -0.8-0.8i * * (9)
状态反馈的控制律u = -Kx+v,具有期望特征值的闭环系统特征多项式为:
f(λ*)=(λ*+0.8-0.8i)(λ*+0.8+0.8i)
取K=kα,kα,则设计的闭环系统特征多项式为:f(λ)=|λI-A+BK|,然后由f(λ*)=|f(λ)|,通过求解该方程即可得到反馈增益矩阵K=-1.762 6,0.197 4,*,*,该增益矩阵可以保证闭环系统的特征值为期望值。
3.6 仿真验证分析
基于上述方法得到控制律,利用MATLAB的Simulink在配平点附近搭建线性数学模型,并进行线性仿真分析。在单位方波输入下,模型输出如图6所示。可以看出在Nz控制架构下,飞机法相加速度响应效果良好,且超调量较小,当飞行员撤销驾驶杆指令输入时,飞机也能很快进入稳态。
将在该平衡点附近设计的控制律应用于非线性六自由度模型,观察飞机在该平衡点附近的响应,并通过俯仰角速律q响应准则评价控制方案的品质效果,巡航飞行速度为100m/s,飞机俯仰角速率响应曲线如图7所示。
根据图7俯仰角速率q在Nz控制器下的单位阶跃输出曲线,结合俯仰角速率响应准则,检验控制器效果。
(1)有效延迟时间t1≈0.05,可以满足1级飞行品质要求。
1级:t1≤ 0.12 s;2级:t1≤ 0.17 s;3级:t1≤ 0.21。
(2)瞬态峰值比(Δq2/Δq1)max≤0.1,可以满足1级飞行品质要求。
1级:(Δq2/Δq1)max≤0.3;2级:(Δq2/Δq1)max≤0.6;3级:(Δq2/Δq1)max≤0.915。
(3)有效上升时间Δt≈ 0.2,同样满足终端飞行阶段1级飞行品质要求。
级别 非终端飞行 终端飞行 1级 9/V0≤Δt≤500/V0 9/V0≤Δt≤200/V0 2级 3.2/V0≤Δt≤1 600/V0 3.2/V0≤Δt≤645/V0
式中,V0为真空速(m/s),配平点巡航飞行速度为100m/s。
综上所述,设计的Nz控制器可以满足俯仰角速率准则1级飞行品质要求,设计的Nz控制器可以满足设计指标,达到预期效果。
4 结语
以上研究表明,采用特征结构配置法设计的纵向飞行控制律具有良好控制效果,响应平滑迅速,可以达到俯仰角速率1级飞行品质要求。此外,通过特征结构配置方法可以一次性求得所需反馈增益系数,缩短了控制律设计时间,提高了效率。但是存在的问题是,采用特征结构配置方法进行控制律设计时,无法预测未配置极点的最终状态,因此可能变得非常不稳定,或者某些闭环极点阻尼太小。这种情况下,需要改变特征值重新设计,从而达到预期目标。通常情况下,大多数理想的闭环极点与开环极点差异不大,因此未配置的极点稳定性也不会造成很大问题。
参考文献:
[1] 朱妍,景海峰,高亚奎. 空客飞机电传控制律设计分析[C]. 深圳:中国航空学会2007年学术年会,2007.
[2] 邵荣士. YF-16电传操纵系统控制律分析[J]. 飞机设计,1998,19(4):26-34.
[3] 姚子羽. 大型商用民航飞机振动故障控制律研究与设计[J]. 系统仿真学报,2015,27(2):295-302.
[4] 吴胜亮. 民用飞机控制律设计与飞行品质评估试验方案研究[J]. 软件导刊,2017,16(8):160-163.
[5] 王永. 民机飞控系统的发展思路研究[J]. 系统仿真学报,2009,20(S2):200-204.
[6] 杜金刚. 基于动态逆方法的飞行控制系统设计与仿真[D]. 西安:西北工业大学,2006.
[7] 谢陵. 民用飞机控制律设计系统工程过程研究[J]. 软件导刊,2015,14(5):41-43.
[8] 李欣. 大型客机自动飞行控制律研究[D]. 南京:南京航空航天大学,2013.
[9] 周蜜. A320飛机电传操纵系统的控制律及其重构浅析[J]. 科技风,2016,29(12):12-13.
[10] ANON.Flight control design-best practice[R]. NATO RTO-TR-029,2000.
[11] PRATT R W. Flight control system[J]. AIAA Progress in Astronautics and Aeronautics,2000(184):375-382.
[12] ANON.Flying qualities of piloted aircraft[S]. MIL-STD-1797B, Department of Defense Interface Standard,2006.
[13] TISCHLERY M B,TOM BERGER.Longitudinal control law design and handling qualities optimization for a business jet flight control system[Z]. 2014.
[14] 杨玉蕾. 民机自动飞行系统工作模式研究[D]. 南京:南京航空航天大学,2012.
[15] 姬猛. 推力不对称时民机飞行控制律重构技术研究[D]. 南京:南京航空航天大学,2011.
[16] 周立冬. 无人直升机前飞状态飞行控制律设计技术研究[D]. 南京:南京航空航天大学,2011.
[17] 李乐尧,李俨,王新民. 放宽静稳定性大型客机纵向控制增稳系统设计[J]. 飞行力学,2010,28(4):25-28.
[18] 张平,张明峰,陈宗基. 民机电传飞控系统适航安全舒适性要求初探[J]. 系统仿真学报,2008,20(S2):216-219,228.
[19] 王美仙,李明,张子军. 飞行器控制律设计方法发展综述[J]. 飞行力学,2007,25(2):1-4.
[20] 欧阳绍修,刘振钦. 大型运输机横航向飞行品质要求探讨[J]. 飞行力学,2007,25(1):12-14.
[21] 王会,李绍燕,陈宗基. 基于μ综合方法的运输机纵向自动着陆控制律[J]. 北京航空航天大学学报,2003,48(12):1059-1063.
[22] 周其焕. 民用飞机自动飞行控制系统的发展(上)[J]. 航空电子技术,2001,32(4):43-47.
[23] 杨一栋,牛佩翼,江浩. 飞行控制系统模态转换瞬变抑制技术的研究[J]. 航空学报,1990,26(1):88-92.
(责任编辑:孙 娟)
