针对步行平衡稳定性的外骨骼欠驱动髋关节设计
2020-01-05胡杰徐铃辉杨巍郑祥明
胡杰 徐铃辉 杨巍 郑祥明

摘 要:为改善脑卒中患者穿戴下肢外骨骼机器人进行步行康复训练时,步行平衡稳定性不足的问题,提出髋关节内收/外展自由度控制机理和设计方法,通过基于零力矩点理论的步行平衡稳定性分析,研究髋关节内收/外展主动运动对人机系统平衡的作用。通过设定欠驱动髋关节内收/外展运动自由度,改善人机系统步行平衡,并利用单电机驱动单元实现左右两侧髋关节内收/外展运动的协调控制,从而在运动安全的前提下提升步行平衡安全性。通过MATLAB与ADAMS仿真分析,分别验证步行平衡稳定性和欠驱动方案的有效节能性。仿真结果显示,欠驱动方案相比传统每个关节分别安装驱动的方案,扭矩降低了32.52%。该步行平衡解决方案与欠驱动设计方法对促进康复外骨骼机器人应用推广具有重要意义。
关键词:步行平衡稳定性;外骨骼;机器人;欠驱动;髋关节
DOI:10. 11907/rjdk. 201411 开放科学(资源服务)标识码(OSID):
中图分类號:TP319 文献标识码:A 文章编号:1672-7800(2020)011-0100-06
The Design of Exoskeleton Underactuated Hip Joint
Based on Walking Balance Stability
HU Jie1, XU Ling-hui2,YANG Wei2, ZHENG Xiang-ming1
(1. College of Mechanical Engineering, Ningbo University of Technology,Ningbo 315000, China;
2. State Key Laboratory of Fluid Power and Electromechanical Systems,Zhejiang University,Hangzhou 310027,China)
Abstract:A control mechanism about the adduction of hip joints motion degree of freedom and its design method was put forward, which is aimed at the problem that those patients who suffer from stroke have insufficient stability in walking balance during their walking rehabilitation training with lower extremity exoskeleton. According to the analysis about walking balance stability based on the zero moment point theory. The effect of hip adduction active exercise on the balance of human-machine system. By designing the degree of freedom of the underactuated hip joint adduction movement, the pedestrian balance of the human-machine system is improved, and a single motor driving unit is used to coordinate the adduction movement of the left and right hip joints, so as to improve the safety of walking balance on the premise of motion safety. By simulation analysis by MATLAB and ADAMS, the effective energy conservation of the walking balance stability and the under-driving scheme were verified respectively. Simulation result displayed that the underactuation scheme is installed separately from the conventional joints, and the torque is reduced by 32.52%. The walking balance solution and the underactuated design method are of great significance for promoting the application of rehabilitation exoskeleton robots.
Key Words: walking balance stability; exoskeleton; robot; underactuation; hip joint
0 引言
我国人口老龄化问题逐渐严峻,高龄人群易发的脑卒中疾病发病率迅速增长。现有研究表明,在脑卒中患者早期康复训练治疗过程中,物理运动训练可利用中枢神经系统可塑性,有效改善肌肉张力,从而建立起新的神经传导与肌肉动作的组合关系[1]。相比理疗师指导、陪同患者进行康复训练的传统方式,利用康复外骨骼机器人辅助实现上下肢物理运动的康复训练具有更广阔的应用前景。外骨骼机器人不但可连续辅助康复训练,而且能精确控制指导轨迹并记录康复训练相关数据,使整个康复训练过程定量可控。因此,用于辅助实现脑卒中患者下肢康复训练的外骨骼机器人系统成为研究热点。
下肢康复训练外骨骼包括基于悬吊减重的活动平板式康复外骨骼与直立步行式康复外骨骼。前者利用悬吊减重系统支撑患者部分重力,使其在跑台上进行步行训练,如瑞士医疗器械公司与瑞士苏黎世大学联合研制的Lokomat外骨骼系统[2]、荷兰特温特大学研制的LOPES外骨骼系统[3]等,这种方式能保障步行训练安全性与步态轨迹指导准确性,但患者无法实现真实的自然行走,后者利用外骨骼辅助支撑协助患者实现接近于正常步行的康复训练,对患者步行康复训练促进作用更直接,但为保障外骨骼系统安全性,其步行平衡稳定性需着重考虑。美国派克汉尼汾公司研制的Indego外骨骼系统[4]及日本Cyberdyne公司研制的HAL外骨骼系统[5]均属于直立步行康复外骨骼。由于外骨骼系统可更真实地辅助患者步行训练,有助于提高患者康复训练积极性,近年来针对该类型外骨骼系统的理论研究及样机研制备受关注。
人與外骨骼组成的人机系统平衡稳定性是决定康复训练安全性的关键因素。人体正常步行步态轨迹研究表明,髋关节内收/外展和踝关节内翻/外翻对于人体步行过程中重心切换具有决定性作用[6]。因此,外骨骼在额状面的关节驱动控制是人机系统在步行过程中保持平衡的关键。广州中医药大学陈平平等[7]通过Kinect获取人体骨骼关节点数据信息,然后提取关节点极坐标位置信息,定义运动特征分类集合,完成朴素贝叶斯分类器设计。根据捕获的各种人群数据信息,对在云服务器上的数据分析系统加以量化和分析后进行阈值计算,可对康复训练动作识别阈值进行偏差处理,从而设定不同患者人群最合适的动作标准;韩国西江大学Kong教授[8]在设计EXPOS外骨骼系统时,针对性地将外骨骼大腿杆设计成可弯曲形式,使患者穿戴外骨骼步行时,外骨骼大腿杆能适应人体髋关节内收/外展需求,在额状面进行一定的弯曲变形,然而该运动自由度属于从动机构,无法实现可控;Angold等[9]设计的Ekso外骨骼系统在髋关节内收/外展自由度设计中增加了多个被动关节,以适应人机系统步行时平衡稳定的要求,但由于该自由度没有主动驱动,无法主动控制调整人机系统平衡位置。上述直立步行外骨骼系统借助双拐辅助保障步行时的平衡稳定,对于外骨骼本身平衡调整并未深入开展研究。然而,脑卒中患者由于患侧上肢存在运动障碍,无法利用拐杖辅助支撑以保持身体平衡。因此,研究如何保证外骨骼系统平衡稳定地辅助患者步行康复训练具有重要应用价值。
本文针对上述问题,基于双足步行机器人零力矩点(Zero Point Moment,ZMP)理论[10-12],对下肢步行康复外骨骼平衡稳定性进行理论分析,并设定髋关节内收/外展驱动自由度,用于主动控制调整人机系统在步行康复训练过程中的平衡稳定性。由于增加了髋关节内收/外展自由度,为防止在单腿支撑相髋关节内收/外展角度保持阶段,给该自由度驱动电机带来过大负载,在该驱动自由度增加锁止机构承担支撑相负载,满足实际驱动工况需求。同时,设计离合机构,用以结合锁止机构将左右髋关节内收/外展两个驱动关节简化为单电机驱动的欠驱动关节。为验证该设计对于外骨骼平衡稳定实现可行性,本文对设计驱动机构进行运动学和动力学仿真实验,并对其结果进行分析。
1 基于ZMP理论的步行平衡稳定分析
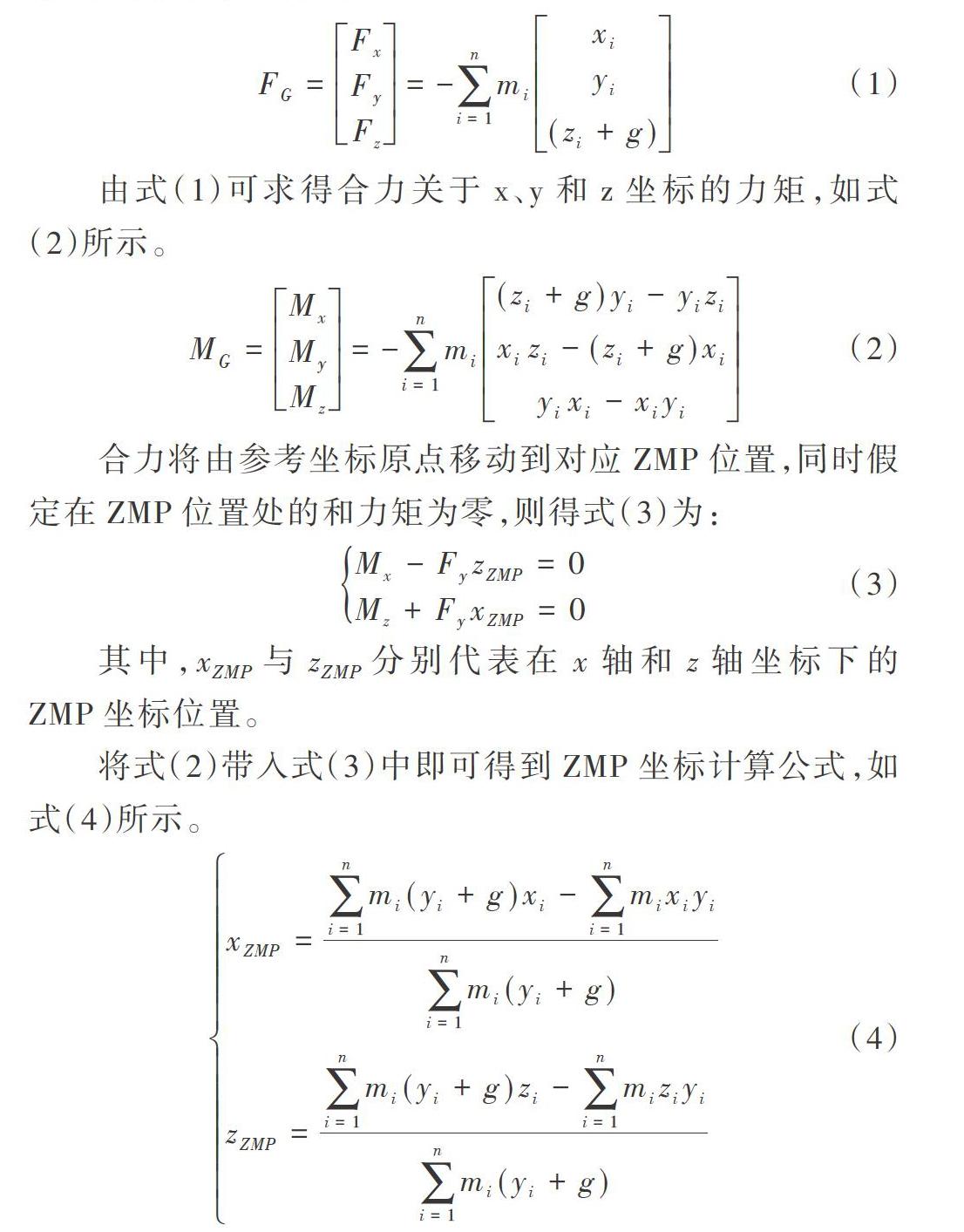
基于ZMP理论的步行平衡稳定分析在双足仿人机器人领域已有广泛的研究和应用,主要通过判断机器人ZMP位置是否在足底支撑平面内以评价其步行过程中是否平衡[13]。因此,针对下肢步行外骨骼平衡稳定特性,以双足仿人机器人ZMP位置作为评价指标。双足机器人ZMP计算原理如图1所示,在步行过程中,机器人受到重力和惯性力作用,假设其合力为FG,mi为机器人各连杆质量,(xi,yi,zi)为机器人各连杆质心坐标,则在动态步行过程中,机器人所受合力可表示为:
FG=FxFyFz=-i=1nmixiyi(zi+g) (1)
由式(1)可求得合力关于x、y和z坐标的力矩,如式(2)所示。
MG=MxMyMz=-i=1nmi(zi+g)yi-yizixizi-(zi+g)xiyixi-xiyi (2)
合力将由参考坐标原点移动到对应ZMP位置,同时假定在ZMP位置处的和力矩为零,则得式(3)为:
Mx-FyzZMP=0Mz+FyxZMP=0 (3)
其中,xZMP与zZMP分别代表在x轴和z轴坐标下的ZMP坐标位置。
将式(2)带入式(3)中即可得到ZMP坐标计算公式,如式(4)所示。
xZMP=i=1nmi(yi+g)xi-i=1nmixiyii=1nmi(yi+g)zZMP=i=1nmi(yi+g)zi-i=1nmiziyii=1nmi(yi+g) (4)
为精确计算外骨骼在步行过程中的ZMP位置,本文借助MATLAB中的SimMechanics仿真模块,计算康复外骨骼正常步行过程中ZMP位置。基于SimMechanics的外骨骼ZMP仿真程序如图2所示,其中左、右腿子系统包括对应侧的髋关节、膝关节屈伸关节轨迹输入及踝关节背屈趾屈关节轨迹输入,各关节输入轨迹参考香港理工大学针对正常人体步行轨迹的测量结果[14],输入各关节的步态轨迹如图3所示。根据式(4)要求,需要在仿真环节测量外骨骼各部件质心位置及加速度参数,因此在仿真程序中对各个部件添加了位置与加速度检测模块。
为了对比外骨骼辅助患者步行康复训练过程中,髋关节内收外展自由度主动驱动对步行平衡稳定性的影响,分别进行髋关节内收外展角度锁死和主动驱动两个方案仿真。在前者方案,对程序中自由度输入角度终保持为零,后者方案对程序中自由度输入角度参照香港理工大学现有正常步行髋关节内收外展角度数据,如图4所示。
通过两种方案分别仿真,计算对应状态下ZMP位置,可判断两者在正常步行过程中其步行平衡稳定情况。ZMP位置计算仿真结果如图5所示,图5(a)中由于外骨骼髋关节内收外展自由度锁死,在步行过程中额状面内不存在重心左右切换,因此其ZMP位置在X轴方向不存在位移变化,导致整个步行过程中ZMP不在足底支撑面内,导致其步行无法保证平衡稳定,这也是下肢康复训练外骨骼需借助拐杖支撑保持平衡的原因之一。从图5(b)中可以看到,当外骨骼髋关节内收外展自由度添加驱动关节使其按照正常步行角度(见图5)运行时,其ZMP位置将大部分处于足底支撑面内,保证在该方案下,步行过程中尽可能保持平衡稳定。因此,由仿真结果可知,外骨骼髋关节增加主动驱动内收外展自由度将显著改善步行康复训练平衡稳定特性。
2 结构设计
外骨骼总体设计方案如图6所示,主要由腰部控制箱、髋关节欠驱动装置、大腿关节、大腿、小腿关节、小腿、踝关节和脚底板组成。腰部控制箱内放置外骨骼控制系统,髋关节欠驱动装置主要实现髋关节的内收和外展,大腿小腿关节由电机驱动实现下肢屈伸,整体实现人体行走过程中关节角度控制。
本文设计的髋关节欠驱动装置如图7所示。该驱动装置整体由3部分组成,分别是电机驱动装置、离合装置和锁止装置。驱动装置通过齿轮带动左右锁止装置和离合装置运动,锁止装置在内收完成时实现单向锁止。离合装置通过拨齿与齿轮的分离和啮合,在不同时刻交替驱动左右髋关节,辅助病人正常行走。
2.1 髋关节离合机构设计
当拨齿与髋关节齿轮啮合时,可驱动髋关节,如图8中的右髋关节;当拨齿与髋关节齿轮脱离时,髋关节不运动,如图8中的左髋关节。驱动装置通过拨齿可实现左右髋关节分时驱动,最终达到欠驱动协调控制的目的。
2.2 髋关节锁止机构设计
髋关节锁止机构图如图9所示。初始位置髋关节保持水平(见图9(a)),当驱动装置工作,并且离合装置中拨齿与一侧髋关节齿轮啮合后,髋关节开始内收,α角增大,β角减小,锁止轮顺时针旋转的同时月牙锁止件逆时针旋转,两者啮合(见图9(b))。完成单腿侧内收时,月牙锁止件抵住锁止轮内壁,由于支持力指向圆形,此时电机输出扭矩为零。当髋关节外展时,驱动装置反向驱动(见图9(a))。拨齿逐渐脱离髋关节齿轮,月牙锁止件顺时针运动,锁止轮逆时针运动,在拨齿即将脱离髋关节齿轮时,月牙锁止件紧靠在锁止轮外壁上,为髋关节提供支撑力。由于支撑力指向锁止轮圆心,此时髋关节所受的力完全由月牙锁止件和锁止轮承受,从而达到减轻电机负荷的目的。拨齿脱离啮合后,髋关节保持水平不变。紧接着,拨齿向另一侧的髋关节齿輪方向运动,当拨齿与齿轮啮合时,另一侧髋关节将开始运动。
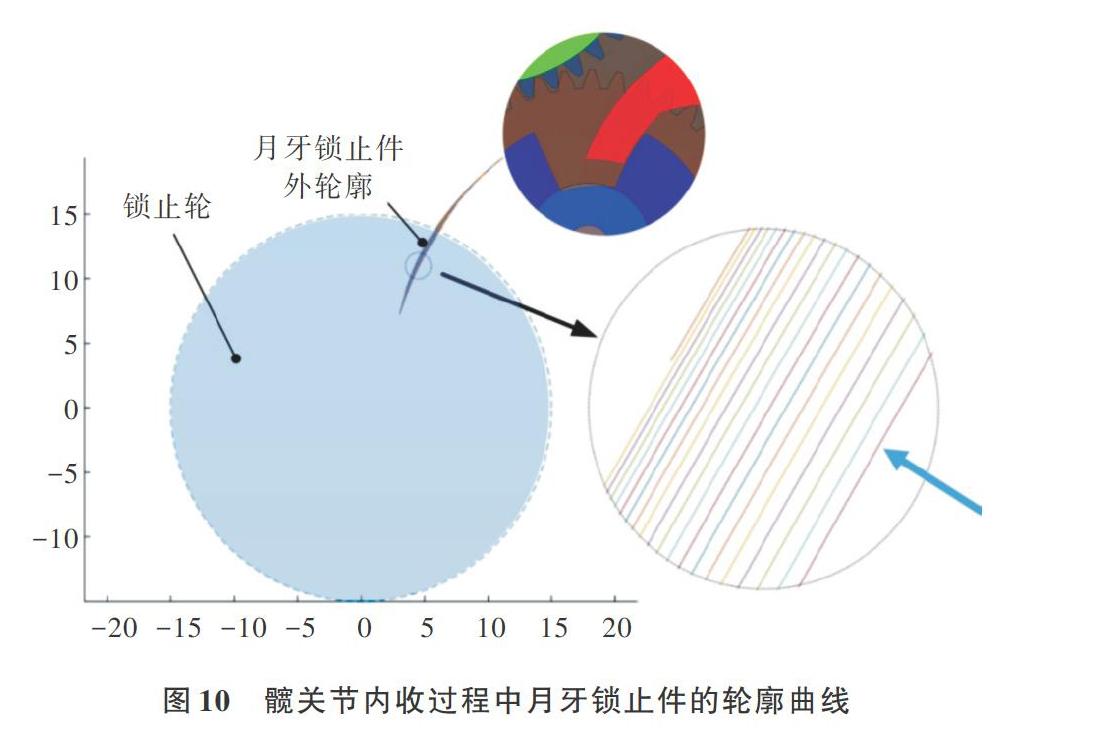
为了保证内收过程中,月牙锁止件与锁止轮啮合。分析髋关节内收过程中月牙锁止件轮廓曲线,如图10所示,曲线以锁止轮为参考系绘制,圆形虚线表示锁止轮,右上方不同的曲线代表不同时刻月牙锁止件的靠近锁止轮部分的轮廓线。可以看到月牙锁止件轮廓并不相交,无法作出与所有时刻的轮廓线相切的曲线,本文设计选择最下方的轮廓线作为锁止轮与月牙锁止件啮合部分的轮廓线。
3 机构运动仿真
为验证欠驱动机构在降低电机负载方面的有效性,本文将10自由度外骨骼模型置于ADAMS环境下进行动力学仿真,如图11所示,分别是髋关节内收/外展、屈曲/伸展,膝关节屈曲/伸展,踝关节背屈/跖屈以及内翻/外翻。对欠驱动方式和普通双电机分别驱动左右髋关节的方式进行仿真分析。欠驱动模型采用上述欠驱动机构,仿真单驱动单元输入控制角度,测量扭矩;普通双电机直接在髋关节齿轮上输入控制曲线,得到相应扭矩。将两种方案进行对比分析。仿真外骨骼步行过程动画如图12所示,通过分别对上述10个自由度运动关节进行角度驱动控制,实现外骨骼模拟自然步态行走。利用动力学模型可仿真计算得出各关节驱动扭矩以及功率。
4 结果与分析
仿真正常步行运动过程中,外骨骼欠驱动机构方案由于髋关节内收完成时,锁止机构提供支持力,在内收阶段之外,电机输出功率为0,而传统双电机左右侧驱动方案需要时刻提供驱动力矩,而两者平均驱动功率几乎相等,如图13所示。通过仿真分析得到两种方案驱动扭矩变化值,如图14所示。其中,“o”代表仅人体步行条件下,髋关节内收/外展所需扭矩值,“x”代表由传统双髋关节驱动方案时电机端驱动扭矩,蓝色实线为人机系统采用欠驱动方案时电机端驱动扭矩,红色实线为人机系统采用传统双关节驱动方案所需扭矩(彩图扫描OSID码可见)。同构对比可发现,采用欠驱动方案时,其扭矩峰值相比传统方案有所降低,且在大部分阶段,其扭矩值为零。
两种对比方案对应驱动功率和扭矩值如表1 所示。由于本文设计的欠驱动方案在支撑相大部分阶段由锁止机构提供支撑力,大幅减轻了电机驱动负担,因此在整个步行过程中,本文设计的欠驱动方案相比传统设计方案,其驱动扭矩方均根值降低32.52%,峰值降低14.15%。
5 结语
基于下肢康复机器人的平衡控制与ZMP理论,本文设计了一种欠驱动的髋关节内收/外展机构,实现了外骨骼辅助人体步行时髋关节欠驱动控制,借助MATLAB对运动学模型进行ZMP位置仿真计算,确保外骨骼系统平衡稳定地辅助患者步行康复训练。同时由于锁止机构在人体内收完成时可以提供一定支撑力,相比于普通的双电机驱动方式,电机端受力情况得到明显改善。ADAMS动力学仿真对比结果验证了本文外骨骼欠驱动髋关节设计方案设想,在改善人机系统步行平衡稳定性的前提下,能减少电机驱动扭矩,对改善外骨骼安全性具有重要的理论借鉴意义和实际设计参考价值。但本文在提高髋关节运动稳定性方面还存在不足,有待更深入研究,以促进外骨骼辅助人体步行的应用。
参考文献:
[1] 王子梅,徐秀林,安美君. 基于虚拟场景的踝关节训练软件系统开发[J].软件导刊,2018,5(17):98-101.
[2] 陈学斌,刘利荣,安峥,等. 穿戴式外骨骼康复辅具临床应用现状分析[J]. 科技导报,2017(2):50-54.
[3] VENEMAN J F, EKKELENKAMP R, KOOIJ H V D, et al. A series elastic-and bowden-cable-based actuation system for use as torque actuator in exoskeleton-type robots[J]. International Journal of Robotics Research, 2006, 25(3):261-281.
[4] FARRIS R J, QUINTERO H A, GOLDFARB M. Preliminary evaluation of a powered lower limb orthosis to aid walking in paraplegic individuals[J]. IEEE Transactions on Neural Systems & Rehabilitation Engineering A Publication of the IEEE Engineering in Medicine & Biology Society, 2011, 19(6):652-659.
[5] CRUCIGER H P O. A new approach to occupational reintegration using the hybrid assistive limb voluntary driven exoskeleton HAL[J]. International Journal of Disability Management Research, 2014, 9(1):61-84.
[6] WINTER D A. Kinematic and kinetic patterns in human gait: Variability and compensating effects[J]. Human Movement Science, 1984, 3(1):51-76.
[7] 陈平平,赵阳洋,陈丽兰.大数据在基于Kinect的中风康复训练中的应用[J].软件导刊, 2017,16(6):124-126.
[8] KONG K, JEON D. Design and control of an exoskeleton for the elderly and patients[J]. IEEE/ASME Transactions on Mechatronics, 2006, 11(4):428-432.
[9] ANGOLD R, FLEMING N. Exoskeleton and method of increasing the flexibility of an exoskeleton hip joint[P]. US,9604369 B2,2017.
[10] SUGIHARA T, NAKAMURA Y, INOUE H. Real-time humanoid motion generation through ZMP manipulation based on inverted pendulum control[C]. IEEE International Conference on Robotics and Automation, 2002(2):1404-1409.
[11] LEE B J, STONIER D, KIM Y D, et al. Modifiable walking pattern of a humanoid robot by using allowable ZMP variation[J]. IEEE Transactions on Robotics, 2008, 24(4):917-925.
[12] KAGAMI S. A fast generation method of a dynamically stable humanoid robot trajectory with enhanced ZMP constraint[C]. IEEE-RAS International Conference on Humanoid Robots, 2000:1-12.
[13] HUAN T T, CAO V K,HO P H A,et al. Adaptive gait generation for humanoid robot using evolutionary neural model optimized with modified differential evolution technique[J]. Neurocomputing, Volume 320, 3 December 2018, Pages 112-120.
[14] 盛榮,孙首群,焦玉格,等. 机器人无标定手眼协调方法研究[J]. 软件导刊,2020,5(16):23-28.
(责任编辑:江 艳)
