基于天空基协同的海上目标任务规划应用
2020-01-05李明马明杰金明磊
李明 马明杰 金明磊


摘 要:随着人类对海洋的进一步探索,海洋在国家发展中占据了越来越重要的地位,如何综合应用天空基获取海洋信息,实现多基协同完成海上目标任务,变得尤为重要。本系统主要将天基与空基相结合,实现天空一体化海洋遥感资源任务规划,用以完成海上广域目标和移动目标的识别和监测。经过仿真实验,完成了天空基协同海上目标任务规划,实现了多源遥感融合。
关键词:多基协同;无人机;卫星;任务规划;任务分配;
中图分类号:E91 文献标识码:A
Application of Maritime Target Mission Planning Based
on Sky-based Collaboration
LI Ming1,MA Ming-jie2 ,JING Ming-lei1
( 1. Aerospace Star Technology Co.,Ltd.,Beijing 100086,China;
2. School of Electrical Automation and Information Engineering,Tianjin University,Tianjin 300072,China)
Abstract:With the further exploration of the ocean by human beings,the ocean has occupied an increasingly important position in the development of the country. How to comprehensively apply the sky-based means to obtain marine information and realize multi-base collaborative accomplishment of the maritime target mission has become particularly important. The system mainly combines space-based and space-based,and realizes the task planning of sky integrated ocean remote sensing resources to complete the identification and monitoring of maritime wide-area targets and moving targets. After the simulation experiment,the sky-based collaborative maritime target mission planning is completed,and multi-source remote sensing fusion is realized.
Key words:multi-base coordination;drone;satellite;mission planning;task assignment
近年来,随着“建设海洋强国”战略的推进明确从海洋资源开发、海洋科技创新、海洋生态文明建设、海洋权益维护等方面助力建设海洋强国的路线方针,坚定走认知海洋、经略海洋、管控海洋之路。我們正式走入海洋,开发海洋,维护国家海洋权益,但是我们对海洋的监控能力还远远不足。海洋监测主要存在过程中还存在不足,海洋多源信息融合能力不够,无法精确及时的获取目标信息。海洋多源信息获取途径少。海洋多源信息整合能力差。我国虽然在天基,空基投入了很多,建设无人机基地,建设卫星体系。但是多基协同和数据融合方面,并未形成成熟的技术体系,无法满足现阶段海上目标任务的业务需求。海洋环境复杂,海域监测任务不确定性极大,天气,地理位置,政治原因都会影响监测任务。通过单一的遥感监测手段远远无法满足任务需要。天基可以实现大面积影响可以用于广域目标监测,空基灵活性极高可用于移动目标追踪,两者结合实现天空基协同,优势互补,可以实现对海上目标的多方位全面监控,实现我国对海洋的全覆盖,高精度,全方位掌控。已经有诸多国家提出对海洋的监控体系,日本提出了“海洋监视体制”,结合无人机与卫星,监控海洋[1]。我国也有诸多多基协同的研究成果,张拯宁等提出的天空地海多基协同多源融合的海洋应用设想。主要以海上目标的无人机和卫星任务规划研究为中心,实现任务分配,任务规划,无人机路径规划,卫星规划结果优化,实现天空基协同任务规划,完成多源遥感融合。
1 无人机任务规划
无人机任务规划根据给定的海上目标信息,综合现有设备信息以及环境天气等因素,规划出任务执行过程,任务分配以及任务路径等。任务的分配和路径规划在任务规划中尤为重要。无人机的任务分配问题,应该在满足环境要求与任务要求的前提下,合理的分配任务给无人机。无人机的路径规划问题[2],实际上是一个多约束条件数学优化问题,根据目标任务要求、禁飞区、燃料限制风力等级等约束条件,规划出一条安全等级高,可行性好的路径。
1.1 无人机任务分配
1.1.1 问题描述
任务分配需要充分考虑,任务要求,目标环境,为任务分配合适的无人机,以用于目标区域的监测或目标追踪[3]。本系统研究单任务的无人机分配问题,为单项任务指定的目标区域,在任务时间内,规划出适合的无人机方案。
無人机的任务分配是指在指定任务后,为该任务挑选出合适的无人机,即为任务规划出合理的无人机方案。首先无人机方案的无人机的监视范围均包含任务区域,任务对于无人机来说是可达的,其次无人机方案的无人机组成必须是最优的,既可以满足任务需求又能节省无人机资源。
1.1.2 任务分配模型及约束条件
无人机任务分配的约束指标为目标成果类型,目标区域地理位置,任务时间,飞机起降点,无人机状态,无人机休整时间。利用上述几项约束条件可以筛选出符合任务要求的无人机,应该在符合条件的无人机中筛选出对执行任务最有利,对无人机系统负载最小的无人机方案[4]。筛选参数为无人机续航时间,无人机最大起飞重量,无人机升限,无人机抗风等级,无人机翼展,无人机场地要求,无人机起降方式。根据上述参数形成对应目标函数,用于评估无人机对于任务的优先级。
无人机任务分配可以看成一个目标任务从n架待选无人机中挑选出可以满足任务需要且选中的m架无人机是满足条件的k架无人机中最符合要求的。下面提出无人机任务分配模型,对模型符号做出如下定义。
P(lon,lat):UAV基地坐标;
UAV={uav1,…,uavn}:无人机集合;
uavFlyingTime:无人机续航时间;
uavMaxWindLevel:无人机抗风等级;
uavMaxFlyheight:无人机升限;
uavSpan:翼展;
uavStatus:无人机状态;
uavTakeoffMode:起降方式;
uavLoad:无人机载荷;
uavV:无人机平均速度;
uavType:无人机类型;
uavMaxTakeoffWegitht:最大起飞重量;
uavControlDistance:无人机最远巡航距离;
uavDegreeofWear:无人机磨损程度;
uavFuelConsumption:无人机油耗;
task:任务;
taskTime={startTime,endTime}:任务起止时间;
taskZone:任务区域
Pmax:代表任务区域远离无人机基地的最远点;
taskResultType:任务成果类型;
L(Pi,Pj):两点之间的距离
P(x,y):代表经纬度
约束条件:
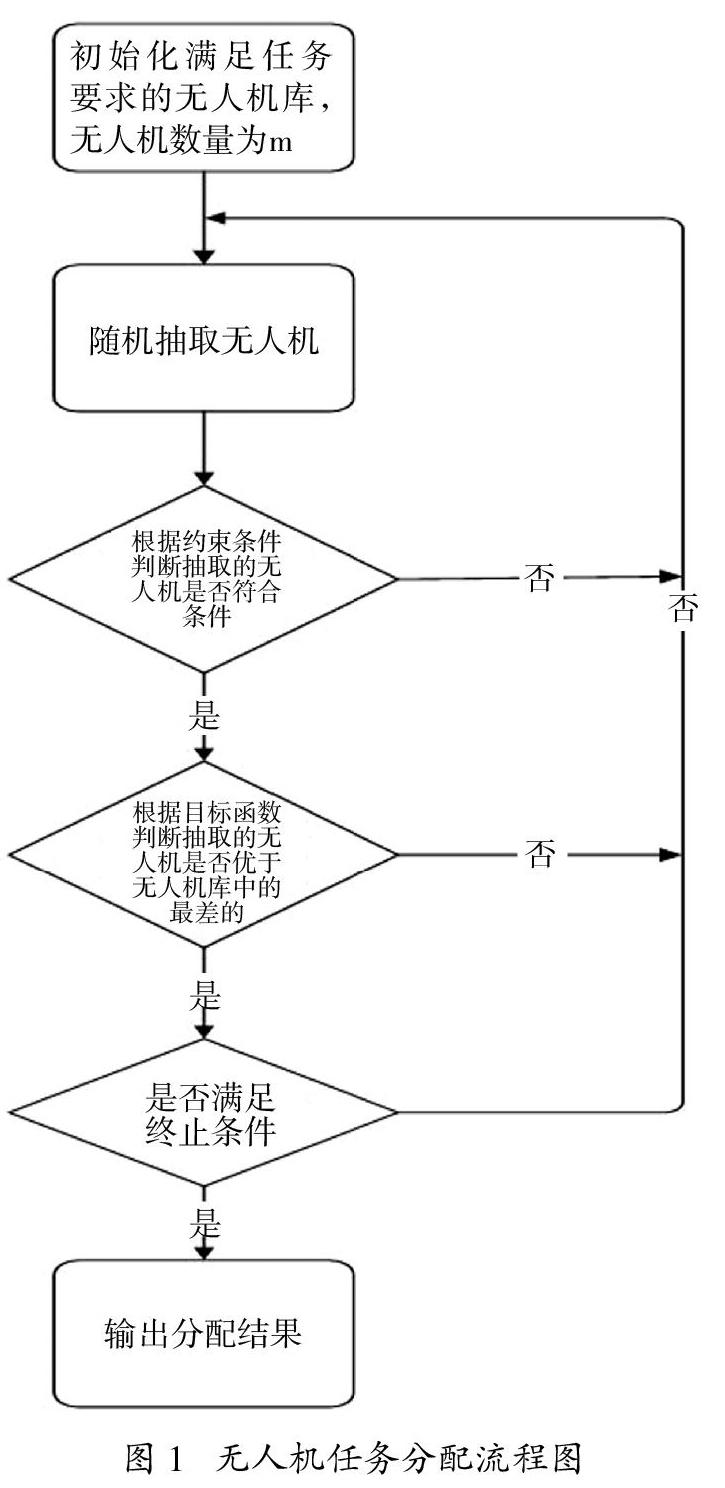
L(P(lon,lat),Pmax) L(P(lon,lat),Pmax)/uavV UavStatus={“空闲”}:无人机状态必须为空闲; taskResultType∈uavLoad:无人机载荷必须能完成任务成果的拍摄; 目标函数: f(uav)=w1*uavSpan+w2*uavMaxWindLevel+ w3*uavTakeoffMode+w4*uavFuelConsumption+ w5*uavFuelConsumption; 现对评价指标作出如下规定,w1+w2+w3+w4+w5=1;翼展越小越好,抗风等级越高越好,油耗越低越好,磨损程度越低越好,起飞方式越简单越好,则分配的无人机越优。 1.1.2 任务分配流程 在无人机任务分配的模型下,根据约束条件挑选出满足任务要求的无人机,根据目标函数挑选出最适合的m架无人机用于执行任务。 由于无人机数目n的上限极大,如果其全部进行运算会极大的降低任务分配的效率。本文参考和声搜索算法,对整个任务分配流程进行改进。其算法流程图如下, 1.2 无人机路径规划 无人机路径规划在航空领域占据着十分重要的地位,是无人机领域的核心技术[5]。路径规划问题由来已久,各种各样的算法被大量提出,但面临这些算法均面临着相同的问题,无人机路径规划时间复杂度过高,计算成本随着空间的复杂性会急剧增加。本文对分配的m架无人机做路径规划执行任务,巡视任务区域。蚁群优化算法是一种基于仿生学的规划算法,为了使蚁群优化算法能够满足本文的任务需求,对蚁群优化算法进行调整以完成无人机路径规划[6]。 为实现无人机路径规划,将无人机的执行任务的地图栅格化,将地图栅格化为320*320,对栅格进行编号,次序为从左到右,从上到下,依次编号为1……102400。无人机路径规划中会遇到禁飞区,因此每个栅格应具有两种状态,可飞和禁飞,分别用0和1来表示。禁飞区与栅格的对应关系可能不是完全重合,因此作出规定,只要单个栅格中存在禁飞区,整个栅格都视为禁飞区。地图栅格化如图2所示。 2 卫星任务规划 卫星资源是有限的,但是卫星的任务却十分繁重,任务种类多种多样。如何利用有限的卫星资源,有序且合理的完成任务十分重要[7]。本系统给定任务后,指定任务区域,在任务规定时间内,利用卫星进行监测,利用卫星多种载荷,获得符合任务要求的成果类型。因此卫星任务规划划分为卫星任务规划与卫星规划结果优化。 2.1 卫星任务规划 卫星利用装备的有效载荷可以对任务要求监测的区域进行监测,回传符合任务要求的成果类型。卫星监测范围大,周期短,在任务规定时间内可以对任务区域多次监测并实现任务区域的全面监测。卫星的观测区域受载荷视场角,幅宽,侧摆角等条件的影响,其示意图如图3所示: 根据卫星观测的原理,完成卫星仿真算法,实现可以卫星单点查询,可以获取卫星实时信息,卫星轨道查询,查询卫星下个轨道周期的信息,以及卫星条带的计算。卫星任务规划先根据任务成果类型挑选出可用的卫星,根据卫星仿真算法的条带计算可以得出覆盖任务区域的卫星条带。其流成图如图4所示。 2.2 卫星规划结果优化 由卫星算法给出的结果是所有符合条件的结果,其条带区覆盖监测区域,监测时间满足任务时间要求。但是可能出现不同卫星的拍摄条带重合,任务调用了过多的卫星资源[8]。因此将卫星规划的结果优化,以最小的卫星资源最好的完成任务是非常重要的,并且可以根据用户指定时间段(包含在任务时间段内)及用户指定区域(包含在任务区域内)重点监测,使卫星资源倾斜,全面细致监测任务,优化规划结果。 卫星规划结果优化主要在于第一优化规划结果,在完成监测任务的前提下,避免浪费卫星资源;第二在用户特定要求下对用户指定的特定时间和特定地点进行重点监测,倾斜卫星资源,完成任务。 卫星规划结果的优化时间空间维度上全面包含任务时间和任务区域,即从任务开始到任务结束卫星监测区域的集合包含任务区域。对于任务时间内用户指定的时间段,增加卫星资源,对于任务区域内用户指定的区域增加卫星资源持续监测。另外应该充分考虑卫星本身的任务量以及其他负荷,慎重给卫星分配任务。 如果用户给出了重点监测的区域或时间,优化过程中会为与重点监测区域或时间相关的条带打上标签,在去除重复条带过程中带标签的条带不参与去重,将全部保留下来,而需要去除重复的条带,使用目标函数作为判别指标,筛选出最优的条带结果。目标函数为f(satellite)=w1*taskNum+w2*resolution+w3*serviceTime+w4*powerConsumption;参数说明:taskNum:卫星任务量;resolution:分辨率;serviceTime:服役时间;powerConsumption:单次执行任务功耗;w1+w2+w3+w4+w5=1;任务量越少越好,服役时间越小越好,分辨率越高越好,功耗越低越好。卫星规划结果流程如图5所示。 3 天空基协同规划的实验测试 使用戴尔服务器一台,56G内存,2T磁盘。戴尔电脑一台,8G内存,500G磁盘。使用Matlab,IDEA和webStorm作为开发工具,完成基于天空基的海上目标业务系统。 UAV路径规划采用蚁群优化算法计算出最优的无人机路径,将海上地图栅格化,设定起点为编号1的栅格,终点为编号为102079的栅格,在栅格设置禁飞区,黑色区域为禁飞区,进行规划最优路径,最优路径结果图6: 卫星规划结果优化可以以最少的卫星完成下达的任务,避免了资源的浪费,综合统筹了卫星资源。新建 任务区域为,任务时间为5.31-6.6日,时间为7天,成果类型为正射影像,SAR影像。采用10颗卫星进行规划,卫星任务规划结果如图7所示: 由图7可以看出,任务规划结果在区域上存在重合,在无特殊任务要求情况下,卫星条带区域,只需要在指定时间内完成对区域的监测,实现条带对区域的覆盖即可。因此对卫星规划结果进行优化,如图8所示: 由图8可以看出在规定的时间内,优化之后的卫星条带可以是实现对任务区域的全部覆盖,避免了过多的卫星资源同时执行一个任务造成资源浪费。 卫星优化前后结果对比如表1所示。表中优化方案为卫星名称与卫星拍摄影像时间,时间表示为日期与24小时制时间。 通过表1可以看出将方案削减为只有两颗卫星,在时间上覆盖率足够,从图8中可以看出区域覆盖率较高。因此验证了卫星优化的成果。 天空基协同针对于此任务的规划结果为卫星监测与无人机巡航相结合协同完成任务[9-10],其中红色边框矩形为任务区域,两个紫色大矩形为卫星监测区域,带有无人机图标的小区域为无人机巡航区域,带有经纬度图标的图形为无人机起飞基地。其结果如图9所示: 4 结 论 设计并实现了基于天空基协同的海上目标任务规划,分别实现了无人机任务分配、无人机路径规划、卫星任务规划、卫星规划结果优化四部分。通过天空基协同即无人机与卫星联动,实现在规定时间内对指定区域采集特定成果类型的数据,完成指定的海上目标任务。最终经过测试,通过无人机路径规划可以为符合任务要求无人机规划出合适的任务执行路径,通过卫星规划结果优化可以极大的节约卫星资源的同时完成任务,卫星与无人机协同完成海上目标任务,实现海上广域目标和移动目标的监测与多源遥感融合。 参考文献 [1] 梁星星,修保新,范长俊,等. 面向海上移动目标的空天协同连续观测模型[J]. 系统工程理论与实践,2018,38(01):229-240. [2] 柯春艳,安思. 无人机全局路径规划算法研究[J]. 信息技术,2019,43(05):33-35. [3] 齐小刚,李博,范英盛,等. 多约束下多无人机的任务规划研究综述[J/OL].智能系统学报:1-14[2019-06-10]. [4] 鲁娟. 无人机在海上舰船目标识别中的应用[J]. 舰船科学技术,2017,39(12):182-184. [5] 陈侠,艾宇迪,梁红利. 基于改进蚁群算法的无人机三维航迹规划研究[J]. 战术导弹技术,2019,(02):59-66. [6] 焦陽. 基于改进蚁群算法的无人机三维路径规划研究[J]. 舰船电子工程,2019,39(03):41-45. [7] 向尚,陈盈果,李国梁,等. 卫星自主与协同任务调度规划综述[J]. 自动化学报,2019,45(02):252-264 [8] 韩传奇,刘玉荣,李虎. 基于改进遗传算法对小卫星星群任务规划研究[J]. 空间科学学报,2019,39(01):129-134. [9] 梁星星. 面向海上移动目标跟踪观测的空天协同任务规划研究[D]. 长沙:国防科学技术大学,2016. [10] CROSS P L. Maritime automated targets recognition algorithm test bed for high resolution ISAR imagery[P]. 2013.
