基于远程动态重构的通用靶场测控系统设计
2020-01-03
(空间物理重点试验室,北京 100076)
0 引言
飞行器测控系统是由外测、遥测、遥控、计算中心等分系统组成的复杂系统,包括靶场测控系统和航区测控系统[1]。现代靶场测控系统的部署方案是将供配电计算机、电源、手动配电控制台、诸元装订计算机、检测站多种变频设备等多个分立设备置于发射场坪附近的前端测试间,将测控计算机、数据处理机、存储器测控设备、检测站多种基带设备等多个分立设备置于后端远控测试间,前后端设备通过交换机和光纤实现局域网互连,后端存储器测控设备与飞行器存储器间通过电光转换连接,测试人员均在后端操作。这种方案集成度不高,设备臃肿,操作人员多,且通用性不强。
随着锂离子电池在航天系统中的大量应用,电源已不再是靶场测试的必需设备;而随着自动测试总线技术的不断发展,利用PXI、PXI Express等总线及其内嵌控制器,将各功能模块集成为一体化设备,可代替传统的分立设备,由后端单个设备统一调控,减少设备,解放人力。
在设备集成化的前提下,通过可重构技术改变硬件逻辑结构,可在相同硬件上实现不同功能,进一步节约硬件资源。
1 可重构技术简介
可重构技术一般包括静态可重构技术和动态可重构技术。静态可重构是指在FPGA开始运行之前为其配置不同的数据文件,实现逻辑功能的改变。
动态可重构技术是在FPGA运行过程中,为其配置不同的数据文件,改变FPGA的逻辑功能。远程动态重构是通过以太网对需要重构的FPGA系统进行局部逻辑功能的更新,是近年来由Xilinx公司提出的基于互联网的可重构逻辑(IRL)系统升级方法[2]。图1是一个典型的IRL系统。

图1 典型的IRL升级系统组成
近年来,随着FPGA可重构技术的发展,以FPGA为核心的可重构仪器大量涌现,比如NI公司的FlexRIO、Teradyne公司的Ai-710等,但这些可重构仪器均不具备远程动态重构功能,无法在某些特殊的场合实现仪器逻辑功能升级。
靶场某些环境下人力不易到达或存在危险,采用远程动态重构技术可以方便地远程快速改变设备的局部逻辑功能,既可迅速实现靶场不同飞行器的通用化测试,又可迅速实现同一飞行器不同功能的测试,方便设备的远程升级维护,大大降低成本。
2 通用靶场测控方案
2.1 总体方案
利用PXI总线将供配电计算机、诸元装订计算机、存储器测控台、手动配电控制台、检测站基带设备和变频设备等设备集于一体,组成一个测控组合,置于发射场坪附近的前端测试间,连接飞行器完成有线测试和无线遥测遥控测试。后端远控测试间仅布置主控计算机和数据处理计算机,由主控计算机通过局域网实现对前端设备的控制和状态检测,由数据处理计算机完成遥测数据的处理和分析,前后端通过交换机组成局域网。靶场测控系统总体方案如图2所示。

图2 靶场测控系统总体方案
2.2 测控组合设计方案
测控组合由RS422通讯模块、1553B通讯模块、LVDS通讯模块、继电器模块、电源模块、基带处理模块和上、下变频模块等构成,各模块均为3U标准PXI板卡。RS422通讯模块可实现供配电控制、诸元装订、状态监测和有线PCM接收;LVDS传输模块可完成存储器控制和存储器数据的高速下载;1553B通讯模块可实现对器上设备的控制和监视;继电器模块直接受面板硬开关控制,在电源模块的配合下提供带电触点,完成器上手动配电,基带处理模块和上、下变频模块实现无线遥测、遥控的一体化测试,嵌入式控制器实现各模块的调控、数据存储和处理。测控组合组成如图3所示。

图3 测控组合组成
结合实际情况,为实现不同的串口通讯形式和无线测控体制,RS422通讯模块与基带处理模块的设计采用了远程动态重构技术。其余模块均易于实现通用性设计,在此不做赘述。
3 可重构模块设计
3.1 可重构模块硬件组成
图4与图5分别给出了RS422通讯模块和基带处理模块的硬件原理框图。两个模块包含相同的FPGA、以太网接口电路、DDR2 SDRAM缓存电路、Flash存储电路、电源转换电路以及PXI接口电路。
选用Xilinx的Virtex-5 FXT系列FPGA XC5VFX30T作为控制器,它包含PowerPC440处理器,以及TEMAC(Tri-mode Ethernet Media Access Controller)、MPMC(Multi-Port Memory Controller)、EMC(External Memory Controller)以及ICAP(Internal Configuration Access Port)控制器等多种IP核,便于实现动态重构。
选用Marvell的PHY芯片88E1111,与TEMAC IP核相结合,实现以太网传输;选用Micron的512MB DDR2 SDRAM作为配置文件的缓存和软件的运存;选用Micron的128Mbits NOR Flash JS28F128J3F75A存储相关配置文件。
RS422通讯模块利用FPGA控制4路RS422收发,选用TI的DS26C31和DS26C32分别作为RS422串口收发器,串行数据的输入输出采用光耦隔离。
基带处理模块利用FPGA实现编码调制与解调解码等,利用A/D、D/A及其相关通道实现基带信号的收发,ADC选用ADI的AD9268,DAC选用TI的DAC5675;选用ADI的AD9516作为DCM(Digital Clock Manager),可通过内部VCO产生高质量、低抖动的时钟信号,供DAC、ADC使用;ADC前端通道完成滤波和阻抗匹配,DAC后端通道实现信号放大和阻抗匹配。

图4 RS422通讯模块硬件原理框图
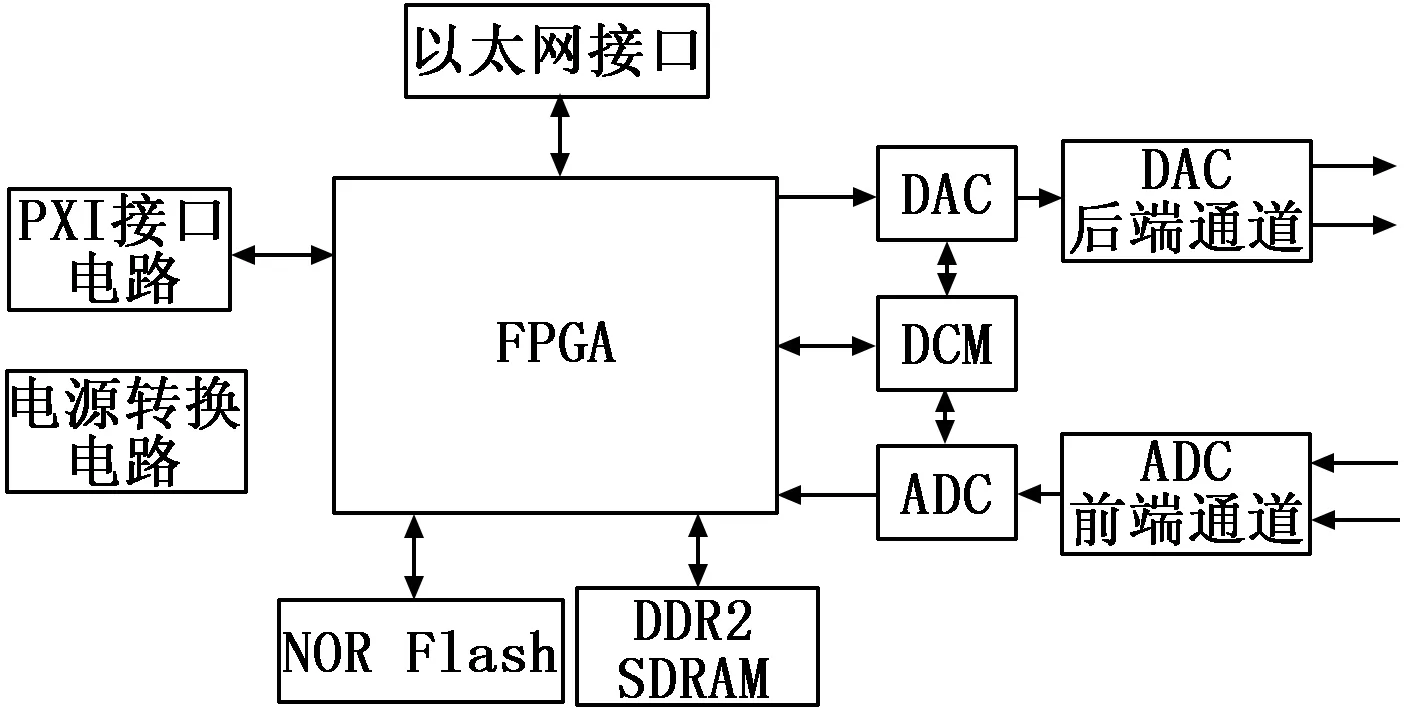
图5 基带处理模块硬件原理框图
3.2 SOPC配置的实现
在FPGA上构建SOPC(System on a Programmable Chip),并将其划分为静态区和重构区,在静态区实现以太网传输、配置文件存储、动态重构和PXI接口等通用功能,而仅在重构区内进行部分逻辑重构,以减小重构单元数目,缩短重构时间。这里采用基于BPI Flash的配置模式实现SOPC的配置[3]。
远程动态重构方案如图6所示。在FPGA静态区内,PowerPC440处理器通过PLB(Processor Local Bus)总线访问各外设控制IP核,实现对各外设的控制。其中,TEMAC IP核完成以太网接口电路的控制,可独立配置接收与发送FIFO,开启接收与发送硬件校验,这里通过GMII接口与PHY芯片连接;MPMC IP核完成DDR2 SDRAM的控制,这里为MPMC配置PPC440MC和NPI两个端口,分别作为与PowerPC440和DDR2的接口,并将MPMC配置为FIXED仲裁模式以减少资源消耗。另外,ICAP IP核用于完成重构区域的配置,PCI IP核完成PCI接口DMA读写逻辑,EMC IP核用于控制NOR Flash。软件程序运行于PowerPC440内,实现对各接口的调度控制。

图6 远程动态重构方案框图
SOPC的配置流程如下。第一步,在Xilinx XPS中创建硬件工程,为PowerPC处理器添加外设IP核(包括自定义的黑盒)并划定地址,添加外部端口约束,生成比特流文件system.bit和块存储器映射文件system.bmm。第二步,将硬件工程导入Xilinx SDK中,导入system.bit和system.bmm,同时将引导程序bootloader.elf设置为初始配置文件,完成配置并生成融合的比特流文件download.bit。第三步,在SDK中创建C工程,导入文件系统生成包BSP,定义库文件,编写驱动程序,生成链接脚本文件linker script,生成软件可执行文件appname.elf并转化为SREC文件。第四步,利用Xilinx impact工具生成BPI Flash兼容的配置文件download.mcs,并烧写入Flash的起始地址。第五步,将SREC文件烧写入Flash的特定偏移地址中,此偏移地址与bootloader中的偏移地址保持一致[4]。
片上系统启动的过程中,只能使用FPGA片内RAM空间作为运行空间;但PowerPC440软件程序移植了文件系统,FPGA提供的RAM空间不够其使用。而引导程序容量较小,上电后可加载到片内RAM中直接运行。在引导程序中设定相对应的地址偏移量,这样就可以根据设定的偏移量直接从Flash中的特定偏移地址中读取软件的配置文件,使软件运行于片外Flash[5]。
3.3 远程动态重构的实现
远程动态重构的工作流程如下:可重构模块上电后SOPC从Flash中读取配置文件,完成初始配置,并与远程计算机完成网络连接;收到来自远程计算机的重构使能后,接收远程动态配置文件和配置区域地址,经DDR2 SDRAM缓存,写入Flash相应地址;最后通过ICAP IP核完成重构区逻辑的动态重构。
控制流程在SOPC软件中实现,软件移植Xilinx公司的XilFATFS文件系统,它提供完整的源程序和良好的接口函数。采用Light Weight IP协议栈,并使用RAW模式的API接口函数完成TCP/IP协议。Xilinx SDK中包含了Light Weight IP的源码与库,可直接生成TEMAC IP核驱动。
3.4 RS422通讯模块重构区功能实现
串口通讯有异步和同步之分。异步串口通讯逻辑较简单,此处不做赘述。标准同步串口通讯包括位同步、字符同步和帧同步,而在标准同步通讯的基础上,又衍生出自同步、准同步等多种通讯形式。
图7是包含CRC校验的标准同步串行通讯的逻辑实现框图。定时通讯触发单元利用时钟计数器产生周期性的触发信号,送入发控单元。发控单元一方面产生波特率大小的时钟供发送单元使用,另一方面根据设定的命令帧长度,在定时触发单元触发下,从发送FIFO中取出一帧命令帧数据,由发送单元发送。发送单元完成并行向串行数据的转化,并在串行数据输出的过程中添加CRC校验码。收控单元根据发送单元给出的状态指示信号判断当前的通讯状态;如为发送状态,收控单元将发送数据和发送时钟送入接收单元,实现对发送数据以及数据校验结果的回收;如为空闲状态,收控单元将获取外部接收数据和接收时钟信号。接收单元完成CRC校验以及串行向并行数据的转化,并将处理的数据和校验结果一并写入接收FIFO中。

图7 标准同步串行通讯逻辑图
对于准同步串行通讯形式,只是在标准同步的基础上,利用定时触发单元产生副帧同步、字同步信号等,准同步时序如图8所示。
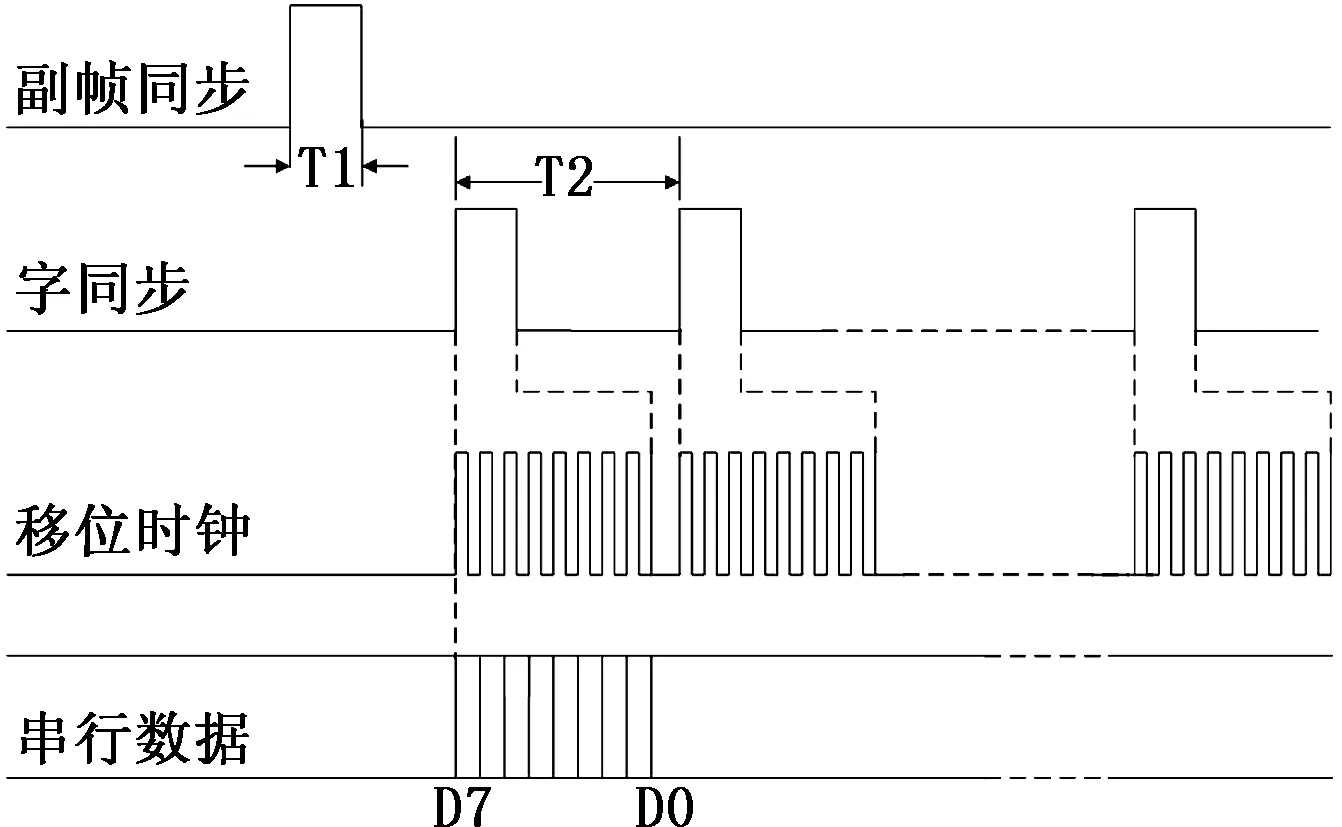
图8 准同步串口通讯时序图
3.5 基带处理模块重构区功能实现
3.5.1 PCM-FM遥测体制实现
PCM-FM遥测体制可实现低仰角条件下的高码率遥测,具有抗多径、抗相位随机闪烁等优势,应用多符号检测技术(MSD)和Turbo乘积码编译码技术(TPC),在误码率为1×10-7条件下,可获得近8dB的信道增益[6]。

图9 PCM-FM遥测体制逻辑框图
PCM-FM遥测体制逻辑如图9所示。在FPGA中产生两路正交信号对A/D采样信号进行数字正交下变频,生成I、Q两路信号并分别进行匹配滤波,以滤除噪声和干扰;然后利用非相干基带MSD算法完成鉴频,得到PCM码流;经位同步、TPC译码、帧同步等过程完成信号的检测,获得遥测数据[7]。另外,利用TPC编码和数字正交调制提供遥测模拟源,以实现系统自检。
可利用上位机通过PXI总线设置码率、编码类型、帧格式、载波频率、载波环带宽、调制度等。
3.5.2 扩频测控体制实现
扩频测控体制可实现点频统一和信道统一,具有抗干扰、保密性强等优势,且通过不同的扩频码可实现多目标测控。这里采用PCM-DSSS-QPSK调制方式,采用非相干扩频模式(TT&C模式二)实现遥测、遥控和外测一体化测控。
扩频测控体制逻辑如图10所示。A/D采样信号同时送入载波与伪码捕获单元和载波与伪码跟踪单元,采用匹配滤波与FFT频率估计的方法进行信号的快速捕获,捕获的载波和伪码送入跟踪单元;利用Costas环实现载波的跟踪、解调和解扩,在FLL跟踪环中,采用归一化的叉积鉴频器,在PLL跟踪环中,采用Costas环反正切鉴相器[8];利用伪码跟踪环实现伪码的跟踪,当载波没有锁定时,采用非相干功率鉴相算法,当载波锁定时,采用相干点积鉴相算法;跟踪单元输出的信号经位同步信号的积分判决,并进行Viterbi译码和帧同步处理,完成遥测数据的接收。遥控指令经卷积编码、交织、串并转换、伪码扩频、载波调制后,经D/A电路发送。
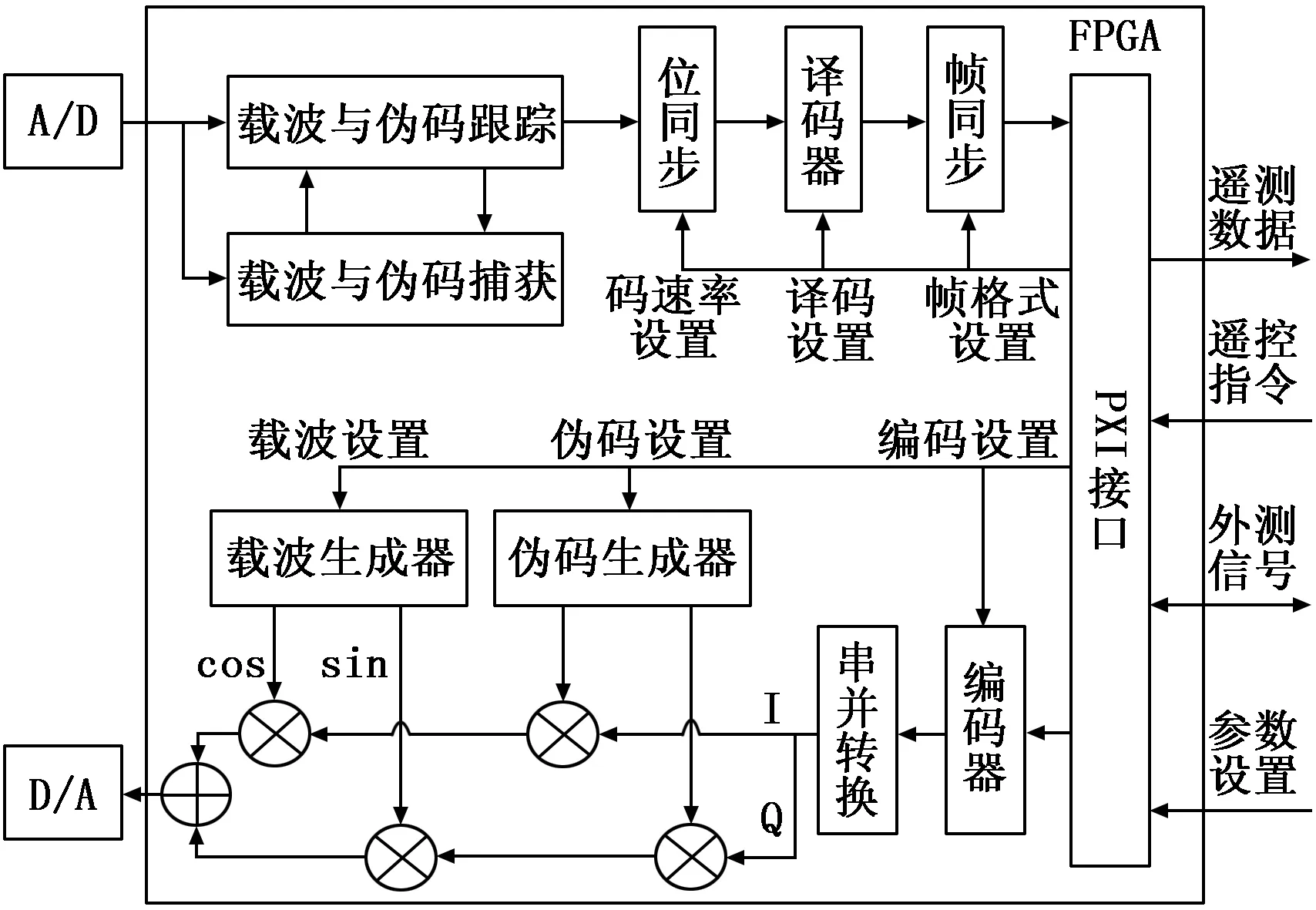
图10 扩频测控体制逻辑框图
可利用上位机通过PXI总线设置码率、伪码类型、伪码速率、编码类型、帧格式、载波频率、载波环带宽、调制度等。
4 测试与分析
4.1 RS422通讯模块功能测试
利用MOXA串口卡对RS422通讯模块进行收发测试,并用示波器监测线路上的收发信号。经测试,各种不同的串行通讯误码率低于1×10-7,波特率调整、定时收发、CRC校验等功能均正常。图11和图12所示分别为标准同步通讯和准同步通讯的波形。
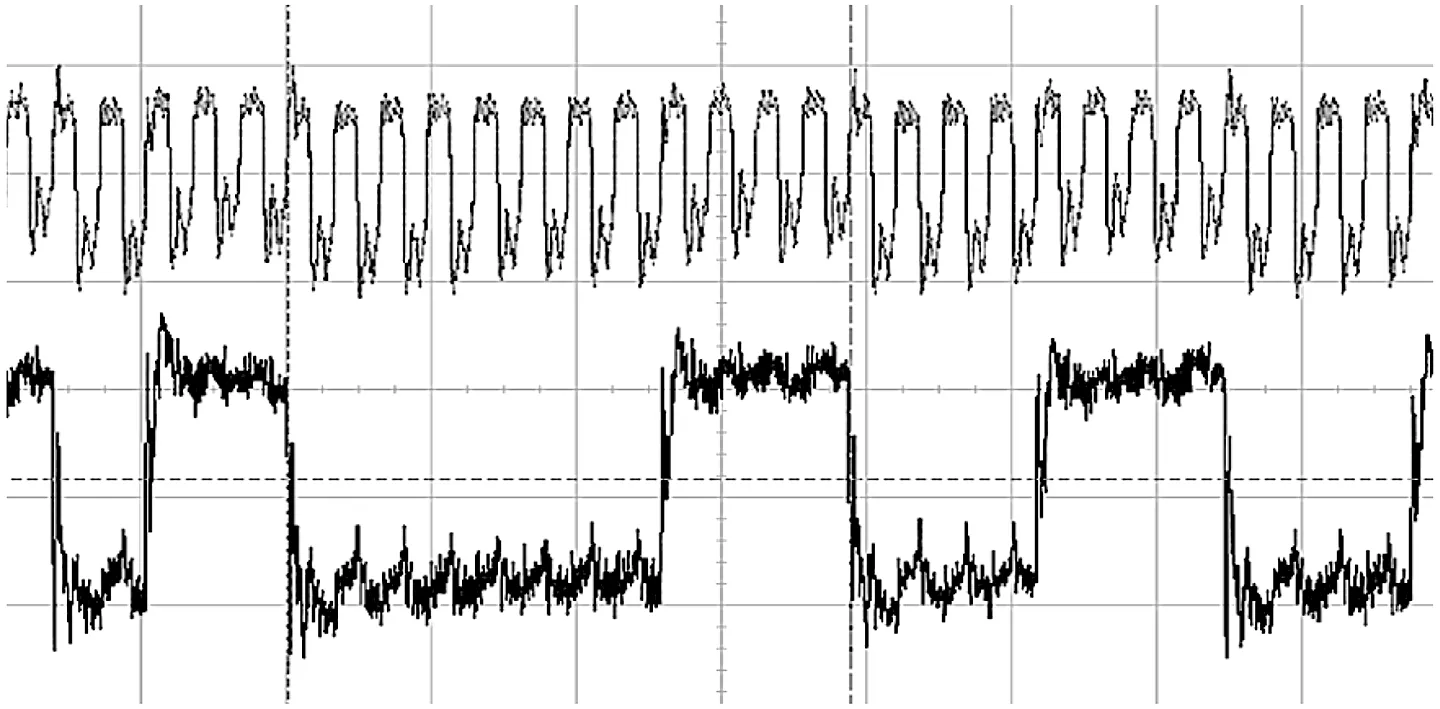
图11 标准同步通讯波形

图12 准同步通讯波形
4.2 基带处理模块功能测试
将基带处理模块的DAC发送通道和ADC接收通道连接,可实现基带的小环比对。经测试,在不同的体制下,基带接收误码率均低于1×10-7,利用上位机调整相关参数,基带处理模块均作出正确响应。
图13和图14所示分别为PCM-FM遥测体制下调制度为0.7时的调制信号频谱,以及扩频测控体制下调制信号的频谱。
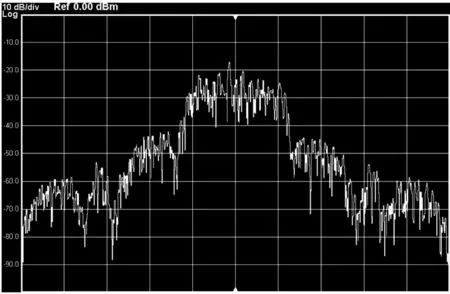
图13 PCM-FM调制信号频谱(SPAN=30 MHz)

图14 扩频调制信号的频谱(SPAN=150 MHz)
4.3 可重构模块重构时间测试
远程重构的总时间t是从远程计算机发送配置文件到可重构模块完成重构这一段时间,由配置文件通过以太网上传至可重构模块端口的时间t0、配置文件写入Flash的时间t1以及配置文件从Flash载入FPGA的时间t2组成,t=t0+t1+t2。利用Wireshark软件测量出网络传输速率,结合网络传输速率和配置文件的容量得出t0。在软件代码中设定时间戳函数,利用返回值差值计算得到t1和t2。
测试中对各可重构模块的多个重构状态进行重构时间测试,其测试结果如表1所示。

表1 重构时间测试结果
根据试验结果,t0由网络传输的速度决定,t1和t2分别由Flash的擦写速度与读取速度决定。用配置文件大小除以t0的平均值,得到传输速率的平均值为32.937 Mbps;擦写速率由配置文件大小除以t1的平均值得到,平均擦写速率为1.023 MB/s;读取速率则由配置文件大小除以t2得到,平均存储速率为10.293 MB/s。
4.4 系统联调
利用两个不同的等效器模拟不同的飞行器,按图15连接同一地面系统,通过远程动态重构方式完成地面系统的功能重构,远程重构时间小于20 s,性能优异。测控组合通过脱插与等效器连接,完成存储器数据下载、供配电控制、有线PCM接收等功能的验证。经联调,存储器下载速率达180 Mb/s(传输距离为50 m),有线PCM传输速率达10 Mb/s(传输距离为50 m)。将测控组合的S波段上、下变频模块分别连接发射天线和接收天线,实现无线遥测、外测、遥控等功能的自检验证。输入功率为-110~0 dBm,输入频率为RF(2 200~2 400 MHz,带宽70 MHz),扩频体制下伪码速率为10~12 Mchip/s可调,遥控码速率为1~10 Kbps可调。PCM-FM遥测体制下遥测数据率达5 Mb/s。满足现阶段靶场测控系统的基本使用需求。

图15 系统测试示意图
5 结论
本文介绍的基于远程动态重构的通用靶场测控系统设计,通过PXI总线将试验所需的各模块集成于前端测控组合,由后端主控计算机完成对前端设备的综合调度,由数据处理计算机完成遥测数据的实时处理,利用SOPC远程动态重构实现了测控组合中RS422通讯功能和基带处理功能的重配置。经测试,测控组合具有较高的可靠性,重构时间短。本方法能够有效降低研发和试验成本,方便设备的远程升级维护,提高测试效率,具有广阔的应用前景。
