基于轮廓波变换的图像混合噪声去除算法研究
2020-01-03许友雷舒忠
许友雷,舒忠
(荆楚理工学院,荆门 448000)
0 引言
在图像的数字化过程中,由于受到成像外部环境、成像部件以及操作方法等因素的影响,所获取的图像,在不同程度上都会带有噪声,其结果是对图像的后续处理带来不利影响。
从信号学角度考虑,图像噪声主要包括加性噪声和乘性噪声两类;从概率论角度考虑,图像噪声又包括高斯噪声、脉冲噪声、泊松噪声等多类[1]。
在图像去噪处理方面,其去噪算法的主要思想都是一致的,首先建立图像的退化模型,在加入噪声模型后,设计去噪算法,最终也只能尽量达到理想的图像效果[2]。
图像去噪的关键技术是图像滤器的设计,从图像空间描述的角度考虑,统称为图像空域滤波;从图像频率分布描述的角度考虑,统称为图像变换域滤波。
图像空域去噪又包括局部去噪和非局部去噪两种方式,两种方法的算法实现是以图像中某一个像素为基础,通过控制该像素相邻域的像素点范围,并参考这些相邻域像素点的灰度值,对该像素的灰度值进行校正。局部与非局部表示的关键包括相邻域像素点的空间位置和像素点的分布范围大小两个方面,局部去噪算法选择的参考像素为某一个像素相邻的少量像素点,且符合相邻域像素点的定义规则;而非局部去噪算法选择的参考像素则涉及整幅图像的全部像素,参考像素的选择依据主要是与需要校正的像素灰度值相似的全部像素点。
局部去噪通常采用均值滤波和中值滤波两种方法。均值滤波的主要原理是以待修复的某一个像素为中心,通过设置并选取该像素的邻域像素,取这些邻域像素的平均灰度值对该像素的灰度值进行校正。中值滤波的邻域像素选取规则与均值滤波方法一致,但对待修复像素的灰度值确定,则以根据选取邻域像素灰度值为参考依据,取灰度值中的中间值对待修复像素的灰度值进行校正。常规均值滤波的结果是弱化或完全损失了图像中的边缘轮廓信息,而常规中值滤波的邻域范围大小选取,其去噪结果也存在差异。近些年来,针对中值滤波提出的改进算法较多[3-5]。
由于局部去噪方法忽略了图像信息的完整性,因此,图像细节的丢失在所难免,而非局部图像去噪则考虑了图像的完整性,其相邻像素的范围得到了扩大,甚至由平面向空间进行了扩展,如Non-local Means滤波算法[6-7],在邻域的认定时就采用了平面邻域与空间邻域结合的机制选取相邻参考像素。非局部滤波算法的核心原理是将一个待处理的像素及其他邻域像素视为一个整体(也就是将多个相邻像素定义为一个像素),其参考的像素则为该整体的邻域,并在整个图像是设定参考范围,如一些自适应滤波算法[8]。还有研究人员相继提出了核回归推广非局部均值滤波算法[9]、图像块处理滤波算法、图像维度按需控制滤波算法、相似度检测滤波算法、相似度双滤波器邻域选取滤波算法,等等,其处理的关键都是为了解决邻域像素的选取问题。
图像变换域(频域)去噪算法的关键是准确区分有效的图像信息和噪音信息,这此信息通常使用频率信号幅值的变换系数来进行描述,其中,有效的图像信息通过大幅值变换系数的信号进行表示,而小幅值变换系数的信号则可以用来表示图像的噪音信息[10]。针对图像在变换域中的表示方法,其幅值变换系数可以通过小波系数进行指定。目前,基于图像小波变换的信号表示方式较多,主要包括:曲线波、条带波、楔形波、轮廓波、表面波等,这些表示方式描述了图像的结构特征和信息分布情况[11-12]。另外,图像频域频率信号幅值的划分,离不开多尺度分析方法应用,图像多尺度分析采用粗、细结合的方式描述图像的整体和细节[13-14]。基于以上频域图像信息的描述特点,可以采用阈值、统计模型构建、阈值与统计建模结合等方法,设计变换域图像去噪算法。
由于图像空域去噪方法只限于同一尺度上的图像去噪处理,变换域去噪虽然引入了多尺度图像处理机制,但在遇到图像中多种噪声同时存在的情况时,其阈值的选取必然需要综合考虑多种因素。考虑到图像中的边缘信息和噪声信息同为高频信息这一因素,直接使用阈值控制的方式进行去噪处理,必然后弱化或丢失图像的去噪细节,对图像后续的检测与识别处理不利。
本文针对图像中脉冲噪声与高斯噪声同时存在的可能性偏大的现状,通过空域与变换域结合的方式,利用多尺度分析手段,实现图像去噪过程中的边缘信息保护和噪声信息去除目标。
1 多尺度多方向分析滤波模型的构建
在图像变换域(频域)处理中,都是以傅里叶变换为基础提出的,傅里叶图像分析虽然构建了图像时域与频域之间的联系,但处理的重点是图像频域的局域化,并不具备图像时域的局域化能力[15],对于一些频域中信号变化较大的图像分析,傅里叶分析并不能发挥作用,因此,提出图像小波分析理论。在构建光滑边缘图像正交小波基模型的前提下[16],就可以设计一些小波变换算法,从而实现对图像信息的稀疏描述,达到对图像噪音信息进行隔离的目的。
正交小波基分析模型通过对图像的分解和重构,可更为方便地对图像的结构进行分析,使得图像可以实现理想的稀疏方式进行描述。图像分解后的边缘模型是通过点和线进行表示的,引入小波基的主要原因是对图像边缘组成的奇异形状进行表示,但是,小波基可以描述的是点状奇异性边缘特征,而对于线状奇异性边缘特征就无能为力了。针对图像边缘奇异性结构的特征,在正交小波基的基础上,引入多尺度图像分析模型可以有效地对图像边缘奇异性结构进行表示。多尺度图像分析模型不仅可以实现二维图像线状边缘的描述,还可以实现三维图像中丝状边缘、管状边缘等多种奇异性结构边缘的描述。在已有的多尺度分析建模方法中,主要包括:脊波变换、曲线波变换、条带波变换和轮廓波变换等几种方法[17]。
本文研究的关键是以正交小波基为基本模型,通过引入基于轮廓波变换的多尺度分析法,构建多尺度分析图像滤波模型。
1. 1 小波基图像分析的缺陷
依据文献[17]提出的定理,指定图像中某个边缘轮廓长度为αI,且长度有限,可令长度集合为I,则图像边缘轮廓的特征函数为f=K1I,其在正交小波基分析重构后的非线性逼近误差为公式(1)所示:
其中,M为图像重构的系数个数,‖f‖V为图像的全变差范数(全变差是指图像的有界变差),且由于正交小波基最佳逼近误差为(其中,M-P为误差衰减级,M为图像重构的系数个数,p为图像的维数),正交小波基逼近误差衰减级的最佳p值只能取1,其图像统计模型中只具有方向性这一个特征(主要包括水平、垂直和±45°对角四个方向),且忽略各向异性这一特征(也是方向性中的一个特征,是指随着方向的变化,其特征属性也会发生变化),同时,也不能再现出图像的多尺度、局域性等特征。
在图像重构稀疏逼近的曲线描述中,二维小波的支撑域通常采用正方形,是通过“点”来描述(逼近)线或曲线,如果M-P的值发生变化,则会出现非零的小波系数值将会以指数形式发生变化,也就不可能实现稀疏方式表示奇异曲线。如果将二维小波的支撑域改为长方形,通过选取“最短的线”来描述(逼近)线或曲线,则可以大大控制非零的小波系数数量。长方形支撑域描述是实现多尺度图像分析的重要基础。
在现有的主要图像小波变换方法中,脊波变换的关键是首先将“线”转化为“点”,然后进行小波分解,但只适用于对直线或近似直线的稀疏表示。曲线波变换则需要经历“高、低频子带划分→不同尺度分块→对分块进行脊波变换”的流程,可最稀疏表示光滑的奇异性曲线,但对图像的分解过程过于复杂。轮廓波变换则可以对图像的各向异性特征进行准确描述,其关键是对图像的轮廓进行提取,则大大减轻了图像分解的难度。
由于轮廓波变换需要在每个方向设计滤波器实现图像频谱划分,在完成图像分解后,必然会出现下采样频谱混淆的现象,解决这一问题的方法是采用非下采样轮廓波变换(NSCT)。
1. 2 NSCT滤波器设计
非下采样轮廓波变换(NSCT)主要由分解滤波器和重构滤波器两部分组成,为了实现对图像的完整重构,就必须满足Bezout恒等式的条件要求。其中,图像分解与重构至少具备两层结构,基本的分解滤波器结构组成为{H0(z),H1(z)},基本的重构滤波器结构组成为{G0(z),G1(z)}。非下采样轮廓波变换的组成结构与频域分解规则如图1所示。

图1 非下采样轮廓波变换原理
NSCT实现对图像多尺度特征进行提取的关键是分解和重构滤波器组的结构设计,其滤波器组常用的都是金字塔结构,而本文设计的非下采样则为树型结构。在树型结构下,如果设定处于j分解层,则低通滤波器的理想带通区间为,高通滤波器的理想带通区间为,低、高通滤波器的理想带通区间互补,这也是满足Bezout恒等式重要前提之一。
本文设计的NSCT滤波器中,首先指定图像分解滤波器为高通滤波器H1(Z),且H1(z)=1-H0(z);所对应的重构滤波器为G1(Z),且G1(z)=G0(z)=1。该滤波器组结构设计,可以完全满足Bezout恒等式的条件要求,其滤波器组的表达式为公式(2):

在树形结构滤波器组中,所有的方向滤波器被设计为双通道模式,在二维频域中图像分解决结果呈现为扇形,并采用下采样方式取样。其图像信号处理的关键是在通过滤波后,采用下采样方式取样,以确保图像平移时的不变性。在此,以双层结构滤波器(应包括两个双通道)设计为例,将第一层图像分解滤波器设定为Ui(zi),i=0,1,第二层图像分解滤波器设定为Uj(zj),j=0,1,则两层通过合并后的分解滤波器则为U(z)=Ui(zi)Uj(zj),i=0,1,j=0,1,其图像分解的结果可以得到四个方向的频域信号。图像重构滤波器的设计方法可与分解滤波器相同。
分解滤波器的内部结构可参照欧几里德算法,通过因式分解的方式设计结构,其数学模型见公式(3):

公式(3)中,(x)和(x)分别为图像低通分解滤波器和高通分解滤波器,(x)和(x)分别为滤波分解系数。与分解滤波器相同,可以同时设计图像低通重构滤波器(x)和高通重构滤波器为(x)。依据Bezout恒等式的条件要求,其NSCT滤波器组的内部结构表达式为公式(4):
以上NSCT滤波器组设计中,其树形结构滤波器组和方向滤波器组,从图像分解和重构两个方面考虑,都可以满足Bezout恒等式的条件要求,从而可以实现对图像的多尺度、多方向分解与重构。NSCT滤波器组的图像像素采样结果如图2所示。
2 多尺度多方向滤波及去噪算法的实现
通过对图像进行滤波处理后,即实现了对噪声的有效分离,并最大程度地保留了图像中的有效边缘信息,接下来需要完成的是去噪处理过程。本文针对图像数字化后,存在组合噪声的现状,以多尺度分层和多方向扩展为理论基础,通过设计NSCT滤波器,并采用非局部均值算法与中值滤波算法结合的方式,去除图像中的混合噪声。
2. 1 低频信号滤波去噪算法的实现
首先非局部的定义并非涉及整个图像的区域范围,而是指以某一个像素为中心,通过对图像的空间结构进行分析,设定一个相对固定大小的选取范围(该范围不仅只是一个像素),将选取范围内的全部像素定义为一个邻域;同时,对图像中其他任意区域进行相似性比较,选取与设定选取范围大小一致的相似区域,将这些区域也指定为参考邻域。因此,本文将以上定义的参考邻域称之为非局部灰度相似邻域。这一思想与传统邻域的定义相比,更具复杂性,在定义邻域时,会出现多个中心像素点,从而实现了邻域定义从空间角度向灰度值角度的转换,直接以灰度值的相似性作为参考参数。在此机制下进行的均值算法,可以较自然地与整幅图像进行高度融合。设定三个进行相似性比较的像素块,其非局部灰度相似邻域的空间结构描述如图3所示。
在图3中,p0、p1、p2为设定的三个像素块区域,p0和p1的相似度要高于p0和p2的相似度。灰度值相似度的比较可以通过加入一个权值进行判定,且权值越大则灰度相似度越高。
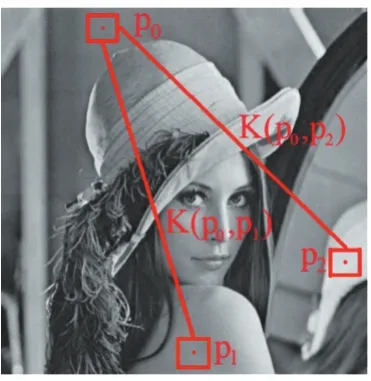
图3 非局部灰度相似邻域的空间结构图示
设i、j分别为进行比较的邻域块中的中心像素点,I为整个图像的所有像素集合,其带有噪声的图像表示为f(i)={f(i),i∈I} ,令Q[f](i)是图像I中所有像素的加权平均灰度值,则有:

k(i,j)是非局部灰度相似邻域块进行相似度比较的权值,而不是中心像素点i、j进行相似度比较的权值。因此,可以设中心像素点i、j对应的非局部灰度相似邻域块分别为Mi和Mj,则k(i,j)可以定义为:

在进行相似度比较时,其权值必须满足0≤k(i,j)≤ 1和两个条件,h为滤波参数,为非局部邻域块的相似度值,该值符合欧几里德距离定义规则,且满足有噪声图像与无噪声图像的相似度的差值为2σ2的要求(其中,σ2表示噪声方差)。w(i)表示权值因子,其取值为:

在以Mi和Mj分别为带有噪声图像中非局部灰度相似邻域块的前提下,设定Ni和Nj为所对应的不带噪声图像中的非局部灰度相似邻域块,则去噪后图像必须满足公式(8)所描述的条件:

2. 2 高频信号滤波去噪算法的实现
使用中值滤波去除图像噪声的主要目的是保护图像边缘部分的高频信息。其主要处理流程为:确定中心像素点(参考非局部均值算法中的方法设置中心像素块)→制定规则选取邻域(包括中心像素点在内整体最好为正方形)→对邻域中的全部像素灰度值按大小排序→选取灰度值中的中间值为参考修正值→依据参考修正值对中心像素点进行修正→完成图像全部像素点的修正。其中,参考修正值(即中间值)的定义为:

在公式(9)中,f(n-k)…f(n)…f(n+k)为选取的全部像素灰度值,并按值的大小进行有序排开。med[]表示中间值的选取规则,如果选取的灰度值个数为奇数,则直接选取中间值;如果选取的灰度值个数为偶数,则通过选取两个中间值求均值。
2. 3 整体算法的实现
本文提出的混合噪音去除算法的核心思想是应用NSCT滤波器进行图像的频域信号分解与重构,关键是同时考虑了对图像低频和高频信号中的噪声信息进行准确表示,并对有效的图像信息进行了保护和加强。同时,对分解后的低频信号采用非局部均值法进行去噪处理,对分解后的高频信号采用中值滤波法进行去噪处理。其算法流程如图4所示。

图4 改进的NSCT滤波混合噪音去除算法流程图示
在该算法中,NSCT分解滤波器较好地从多尺度和多方向两个方面对图像进行了分解,对分解信号的定义通过公式(10)表示:

其中,fL(x,y)为图像的低频部分为图像的高频部分,且高频部分通过分层表示,其中包含有j层,fH(x,y)=fj(x,y)-fj-1(x,y)。公式(10)清晰地表明了NSCT分解的结果中,图像的低频部分只需要一个分量即可进行完整表示,而高频部分需要通过多个分量进行完整表示。
从多尺度(j层结构)和多方向(i个方向)两个方面对噪声图像在轮廓波交换域中进行描述则可以采用公式(11)进行表示:

其中,fj,i(x,y)表示含有噪声的图像,gj,i(x,y)表示无噪声的图像,hj,i(x,y)表示噪声。
3 仿真实验与分析
实验选取三幅图像进行MATLAB仿真实验,首先构建三幅原稿图像的高斯噪声(白噪声)和脉冲噪声(椒噪声)退化模型,然后依据前文论述的小波滤波、NSCT滤波和本文提出的多尺度多方向滤波(改进的NSCT滤波)原理,分别提取图像的低、高频信号,有针对性地采用空域和频域结合的方法对图像进行去噪处理,最后以峰值信噪比(PSNR)为评价参数,对三种图像去噪方法进行比较分析,验证本文提出的图像去噪方向的优势所在。MATLAB仿真效果如图5所示。
通过对图5所示的加噪和去噪效果的主观比较可以看出,所加的两种噪声对三幅原稿图像的影响明显,效果最佳为本文提出的去噪算法,效果最差的是小波基去噪算法。其中,小波基去噪算法主要体现在对椒噪声的去除效果不明显,对高斯白噪声的去除效果优于白噪声的去除效果;NSCT去噪算法存在的问题与小波基去噪算法相似,只是整体噪声去除效果稍好一些;而本文提出的去噪算法基本与原稿图像效果接相。通过对三种方法进行多分辨率下(特别是高分辨率下)比较,其处理效果非常明显。
为了客观地评价三种图像去噪算法的优劣,本实验使用PSNR参数作为图像去噪效果的评价参数,以30.00 dB参量作为最优参考值,其MATLAB仿真实验获取参量见表1所示。表1中的参量比较结果与前文的主观评价结果一致。

表1 三种去噪算法的PSNR参数比较表
以上实验比较结果可以说明:在本文提出算法中,多中心非局部均值算法在图像低频滤波中起到了非常关键作用;在NSCT滤波算法中引入多尺度分层与多方向划分的图像分解滤波器设计,是图像高频滤波中起到了非常关键作用。
4 结语
本文针对图像去噪处理中存在的多噪声共存在的实际,通过对当前基于小波基和NSCT滤波两种主要的滤波器应用进行分析,以通用NSCT滤波器设计为基础,提出了基于多尺度多方向的图像分解模型,主要解决了图像高频部分的有效分离问题;同时,针对图像低频部分在去噪时,多采用以单中心、单像素点建模的图像修正机制所存在的局限性分析,提出了以像素块为中心、涉及图像全局的均值去噪算法。在研究过程中发现:①要较好地描述图像边缘轮廓的奇异特征,就必须获得最佳的稀疏表示。②基于欧几里德算法的Bezout恒等式是多尺度和多方向图像高频信号分离的关键。③全局性的灰度相似邻域块的确定,是图像低频部分去噪必须考虑的重要因素。通过仿真实验的结果也表明了本文研究成果的正确性。
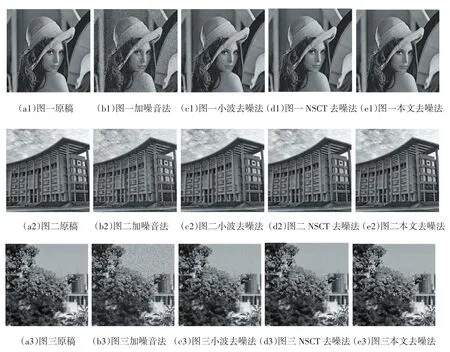
图5 三幅图像采用三种去噪方法的效果比较
