汽车毫米波雷达探测失准故障分析
2020-01-03王孔龙钞永兴肖连飞超WangKonglongChaoYongxingXiaoLianfeiHanChao
王孔龙,钞永兴,肖连飞,韩 超Wang Konglong,Chao Yongxing,Xiao Lianfei,Han Chao
汽车毫米波雷达探测失准故障分析
王孔龙,钞永兴,肖连飞,韩 超
Wang Konglong,Chao Yongxing,Xiao Lianfei,Han Chao
(北京汽车股份有限公司汽车研究院,北京 101300)
毫米波雷达在汽车上用于距离探测,起防撞、辅助变道、障碍物检测等辅助驾驶作用,已经获得了越来越多的应用。针对某车毫米波雷达在完成下线检测校准后仍然出现探测失准的现象进行分析,对导致雷达探测失准的光学校准因素进行研究,验证了雷达自身容许安装误差范围对探测失准的影响。
毫米波雷达;探测失准;下线检测;光学校准
0 引 言
毫米波指的是波长介于1~10 mm的电磁波,其波长短、频段宽,较为容易实现窄波束。毫米波雷达分辨率高,不易受干扰,是测量被测物体相对距离、相对速度、相对方位的高精度传感器,早期被应用于军事领域,随着雷达技术的发展和进步,毫米波雷达在汽车、无人机、智能交通等多个领域开始获得应用,随着安全法规的提升和智能网联趋势的越发显著,汽车用毫米波雷达得到了愈发广泛的应用,为汽车智能驾驶提供了巨大发展空间[1]。
汽车用毫米波雷达不仅需要供应商对其进行测试以保障产品的性能和质量,汽车生产厂家也需要评估汽车雷达的技术指标[2]。这就包括毫米波雷达在车辆上装配完成后进行的位置和角度标定,以使其更好地发挥作用,这称为下线检测校准。
某车型在完成毫米波雷达下线检测校准后,行驶约1 000公里时突发毫米波雷达故障,自适应巡航系统不能正常工作,经查故障码为毫米波雷达失准。随后有数台车陆续出现同样的故障现象。对这些故障车辆的毫米波雷达安装状态进行检查,无松动异常,对毫米波雷达安装部件进行检查,无破损现象,询问车辆使用人员,车辆无任何改装,也没有针对毫米波雷达进行任何拆装改制操作。对这些车辆进一步分析,发现所安装的雷达为同一批次。
1 理论分析
汽车用毫米波雷达下线检测校准主要目的是使雷达轴线与车辆的行驶轴线尽量重合或者是控制在一个允许的范围内。但雷达轴线通过外观无法直接获得,因此在雷达外表面安装有反射镜,即校准镜,其轴线与雷达轴线之间的偏差角度在雷达生产时已经进行了测量并写入雷达传感器,利用光学设备读取校准镜的偏差进行角度的调整和校正。
雷达当前常用的光学校准方法如图1所示,首先通过光学测量确定雷达上的校准镜轴线与车辆行驶轴线的偏差,再通过CAN(Controller Area Network,控制器局域网)网络读取校准镜与雷达轴线的偏差角,通过计算获得所需的调整方向和调整量并显示到相关屏幕上,最后通过人工调整安装在整车上的校准螺栓,调整雷达的水平方向和垂直方向,最终实现校准目的。

图1 汽车用毫米波雷达的光学校准示意图
该光学设备内部结构示意图如图2所示,由点光源、透镜、幕布以及相机等组成,用于发射光源到雷达外表面的校准镜上并记录反射回来的光源在幕布上的位置,将此位置作为校准镜与车辆行驶轴线的偏差值输出给计算机进行计算。
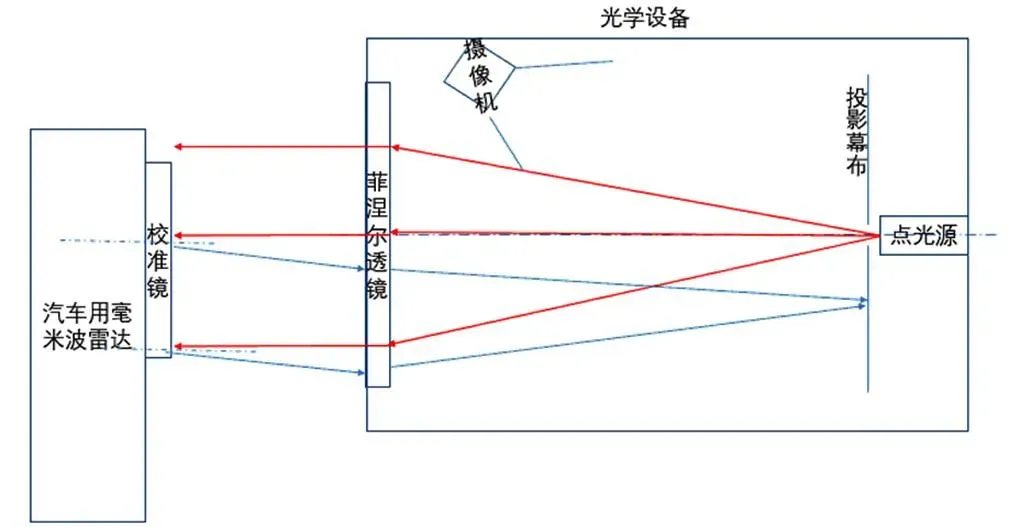
图2 光学设备内部结构示意图
在进行光学校准之前,需要确保车辆完成四轮定位并有正确的胎压,校准时车辆所在的地面与光学设备都处于0°水平。
为了提升雷达的探测精度和探测准确度,针对雷达探测角度进行了限制,让雷达波束在所需要的范围内尽可能达到最大,为了适应车辆姿态变化对雷达探测角度的影响,雷达在设计开发阶段针对不同的偏差角度进行了适配,使得雷达具备更大的容错性,从而降低雷达安装难度。当前常见的雷达容许安装误差,在水平方向和垂直方向分别为理论设计角度±3°,该容许误差不宜过大,否则会降低雷达的探测精度。理论设计角度指的是雷达在设计之初其相对于车辆横向平面的设计角度,雷达的安装、校准以及性能匹配等都以该角度为基准。针对轿车雷达的理论设计角度一般为0°;针对SUV雷达的理论设计角度一般为-2°左右,即让雷达天线表面在整车安装状态偏下,以获得更大的雷达反射面。雷达的容许安装误差一般通过程序写入雷达,雷达工作时会不断检测其实际角度与容许误差的差异,当实际角度长时间超出容许误差时,将会停止雷达工作,并将故障反馈给驾驶员,以避免错误的探测结果给车辆驾驶安全带来影响。
故障车为获得更大的雷达反射面,其雷达理论设计角度为-2°,在进行光学校正时反射回幕布上的光点基本都处于幕布下方,校正范围控制在±0.2°,理论上的校正合格范围如图3所示。
将雷达校准镜的反射光点调整到位于投影幕布下方4°±0.4°范围,则雷达位置位于整车装配位置-2°±0.2°,此时校正合格,车辆予以放行。

图3 故障车雷达理论校正合格范围
2 故障分析改进
对于出现雷达失准的车辆,追查其在做雷达光学校准时候的结果,均符合校正要求。对这些车辆在故障时候的雷达垂直角度进行测量,空载状态下该垂直角度基本处于-2.9°~-2.7°,车辆满载以后垂直角度略微超过-3.0°,均满足雷达容许安装误差范围,即理论设计角度±3°。
对故障车辆重新校准后,满载状态下不到半小时,车辆再次报雷达系统失准故障;因此推断,雷达的垂直角度容许安装误差异常。
对雷达程序中的垂直角度容许范围参数进行排查,发现其值为0°±3°,当雷达工作时,软件检测的垂直角度如果超出-3°~3°范围就会报故障。而该车型雷达的垂直角度设计值为-2°,其设计容许安装角度应在-2°±3°范围内,即容许安装角度应为-5°~1°。
通过修正雷达的容许安装误差参数,对出现雷达失准的车辆再进行测试,故障没有复现。
3 结 论
雷达容许安装误差范围不宜过小,并且雷达的容许安装误差范围应以理论设计角度为基准,否则会导致诸如雷达系统失准之类故障频发。
整车悬架系统设计时应充分考虑车辆在不同载荷状态下的车辆俯仰角变化,确保雷达工作时的水平角度和垂直角度所在的实际角度保持在雷达容许安装误差范围之内。
研究中未对因胎压变化和不同路面水平度造成雷达实际工作角度变化进行分析,测试结果和理论分析对于类似问题的解决有一定参考和借鉴意义。
[1]韩宝石,王峥.车载毫米波雷达国内外发展现状综述[J]. 数字通信世界,2019(9):15-16.
[2]叶常青. 汽车毫米波雷达测试分析与研究[J]. 信息通信,2019(7):98-99.
2020-08-21
U463.6
A
10.14175/j.issn.1002-4581.2020.06.011
1002-4581(2020)06-0042-03
