矢量法现场动平衡研究
2020-01-01张帝
张帝
(沈阳鼓风机集团股份有限公司 透平工艺部,辽宁 沈阳 110869)
转子现场动平衡,又称整机动平衡,是利用较常见的测振仪器,直接在工作机械上对失衡转子加以检测平衡。与转子在专门的平衡机上平衡相比,现场动平衡具有一些显著的,甚至是不可替代的优点。现场动平衡是指不用把转子从机器中取出来,对机组进行振动校正的一种平衡方法。具有工作量小、快速等优点。现场动平衡常用的方法有三元法现场动平衡和矢量法现场动平衡。三元法现场动平衡需要机器反复起停多次,把圆周方向均分三处,在每处分别加等量配重并计算配重对振幅的影响,最后根据振幅的变化算出理论位置轻点。在轻点位置加配重达到平衡转子的目的。但是针对那些加配重振动变化不敏感的转子,三元法现场动平衡平衡的精度不高,平衡失败的情况也很多。本文介绍的是矢量法现场动平衡,主要是依据振动相位及振动数值在联轴器上加重对机组进行校平衡的方法。矢量法现场动平衡只通过一次配重便能计算出理论重点,大大提高现场动平衡的效率。
1 准备工作
1.1 原始振动数据的选取
原始振动的选择包括振动测点的选择和振动数据的选择。在进行现场动平衡之前,必须对原始振动进行认真筛选,要对振动大的测点进行初步分析,如存在工频为主、振动随转速变化敏感、带负荷过程中振动值增大且相位稳定等现象,初步分析认为存在转子不平衡现象。平衡哪个转子就要以该转子两端轴承的数据作为计算依据。现在机组都安装有在线监测系统,用于测量机组机械状态各项参数。在线监测系统监测机组一般每侧都有X、Y 两个测点,取X、Y 振动的最大值用于计算第一次平衡配重重量。另外,工作转速下的动平衡的原始数据的选择,一般选择接近定转速或者初定速的数据作为平衡数据,因为长时间空转会出现其他不稳定因素,如碰磨、热弯曲等。
1.2 第一次平衡配重重量的选取
对于平衡配重的选择,一般可参考如下经验公式来推算:
P=A0Gg/rω2s
式中,P 为转子某一侧端面试加重,单位kg;A0为转子原始振动,um;r 为加重半径,m;ω 为转子角速度,rad/s;ω=2πf,f=n/60,n 为平衡转速;g 为重力加速度,m/s2;G 为转子质量,kg;S 为灵敏系数,见表1。

表1 转子试加重量的灵敏度 S
1.3 第一次平衡试加重位置的选取
盘转子,用万用表测量联轴器侧振幅大测点的间隙电压,当间隙电压突变时,振动大的探头对应的联轴器螺栓的位置定义1#,相位为0°,在盘转子过程中记录振幅大测点的初始相位,机械滞后角为60°~90°(机械滞后角指的是转子挠曲方向滞后于转子不平衡力的角度,即转子高点滞后于重点的角度的选定对于刚性转子来说相对简单,一般选取0°就不会有太大的偏差。对于柔性转子来说,滞后角的选定就需要多方面的考虑。在临界转速下,不论是一阶临界还是二阶临界转速下,滞后角都可取90°,在一阶临界转速以下,滞后角比90°低一些。),逆着旋转方向为角度增加方向。根据振幅大测点的初始相位和滞后角计算出重点位置,重点位置对面为第一次试加重位置。例如,联轴器螺栓为12 个,振幅大测点的初始相位为120°,旋转方向为逆时针。试加重位置简图如图1。
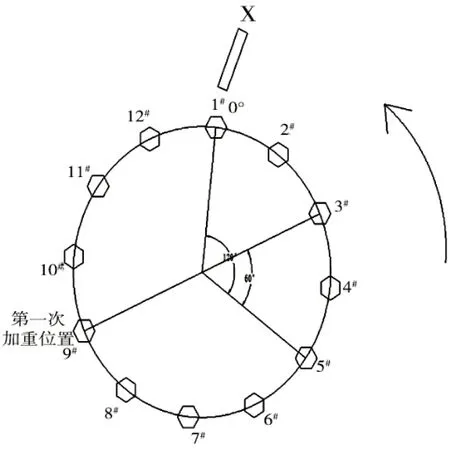
图1 试加重位置简图

图2 矢量法现场平衡原理图
(1)万用表间隙电压突变时,为1#螺栓对应的位置,即相位0°位置。
(2)逆旋转方向为相位增加的方向。
(3)振幅大测点的初始相位为120°,对应5#螺栓位置,为高点。
(4)假设滞后角为60°,3#螺栓对应的位置为重点。
(5)3#螺栓对面9#螺栓为第一次试加重位置。
如现场不具备盘转子、测间隙电压的条件,可以选圆周方向任意一位置按计算出的试加重量进行配重。
2 矢量法现场平衡
2.1 配重位置确定
(1)记录原始数据的工况条件、转速、振动幅值A 及其相位P1。
(2)停车,加试重,记录试重块重量m1 和实际位置p,再次开车到第一次记录原始数据的工况条件、转速。记录振动幅值C 及其相位P2。B=C-A 为试重块加在p 位置引起的振动矢量,要想将A 振动值降低到最小,需使得B 大小及方向与-A 重合。P3=B-(-A),根据图2 显示P3 为正值,计算理论加重位置为p 按机组运转方向移动P3 角度。
2.2 配重重量确定
m1=试重块重量
m2=理论配重重量
m2=m1×A/B
2.3 案例
某化肥厂氮氢压缩机,工作转速为12000rpm,在工作转速运转过程中,驱动侧一测点VT62932 振幅80um,相位角度为120°,同一支撑轴承另外一测点VT62931 振幅35um,相位角度为4°。两测点显示的现象为过临界转速后振动随转速升高上涨且频谱显示主频为工频且上涨频率为1 倍频。该转子重量为400kg,联轴器中间端把合螺钉位置中心距为300mm。
根据题目分析该测点振幅大明显是转子不平衡造成的。根据公式P=A0Gg/rω2s,试加重重量P=80×400 ×9.8/150×10-3×150×(2π×12000/60)2=8.8g。
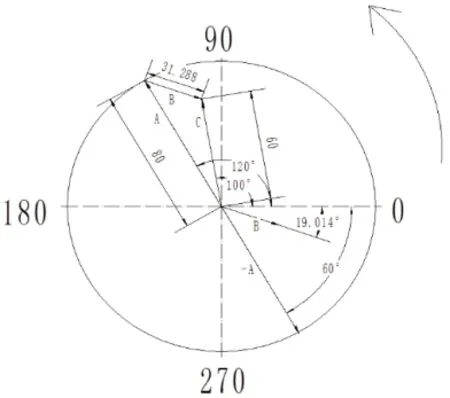
图3 案例计算图
由于受现场条件限制无法在盘转子状态下测量VT62932测点的间隙电压,在联轴器中间段任一螺钉位置加配重8.8g。再次开车到工作转速12000rpm 时,VT62932 振幅60um,相位角度为100°。VT62931 振幅28um,相位角度为347°。根据VT62932 原始振动数据、相位角和第一次试加重后的VT62932 振动数据、相位角等相关的关系及计算详见图3。
A 为VT62932 原始振动矢量,C 为VT62932 试加重8.8g后的振动矢量。B 为8.8g 配重引起的矢量。要想将A 引起的不平衡量全部抵销,加的配重需引起-A 振动矢量。B 与-A 之间角度差为60°-19.014°=40.986°,由于逆着旋转方向为角度增加方向,因此,配重位置加在-A 方向需在第一次配重位置顺着旋转方向40.986°加配重,理想的配重的重量为8.8×80/31.288=22.5g。再次开车到工作转速为12000rpm,VT62932 振幅15um。
3 结语
采用矢量法现场动平衡,其具有平衡次数少、效果明显的特点。本文主要针对矢量法现场动平衡的准备工作、平衡过程进行分析研究,希望对旋转机械的现场动平衡的操作有借鉴作用。
