车载LiDAR系统在地籍测绘中的应用研究
2020-01-01王申王万子
王申 王万子
(1.河南省遥感测绘院,河南 郑州 450003;2.北京地星伟业数码科技有限公司 海南分公司,海南 海口 571100)
1 引言
地籍测绘是土地管理信息的主要来源,也是影响国民经济发展的重要因素之一[1],获取和表达地籍信息,为建立地籍档案提供信息基础,是地籍调查中依法认定权属界址和利用现状的技术手段,能满足土地管理部门及其他国民经济建设部门的需要[2-3]。目前,随着城市化进程的不断加快,地籍变更快,数量大,地籍变更调查任务愈显繁重。针对地籍测量精度高、专业性强、配套成果资料(图、表、册、卡等)现势性强、同步变更需及时的特殊要求,打破传统以全站仪为主体,配合使用RTK 和钢尺为主的测量模式,寻找一种快速高效的地籍信息获取技术迫在眉睫。
测绘新仪器、新技术的更新推动了地籍测量发展。车载激光扫描系统Mobile Laser Scanning System(MLS)作为一种快速的数据采集手段,在车辆行驶过程中可以对沿街城市地物特别是建筑物侧面墙体信息进行采集,并可在软件支持下提取地籍要素,从而达到快速、有效、精确测绘的目的[4],其集成系统包括车辆、全球定位系统(GPS 或GNSS)、惯性导航仪及车载计算机系统[5]。本文以车载激光扫描系统为数据采集技术手段,建立地籍数据获取与处理的全流程技术方案,并进行精度分析,为城市规划、乡村振兴等全息要素的获取提供新的技术支撑。
2 车载激光扫描系统
车载三维激光扫描测量系统是一种全新的对地表空间信息快速定位采集技术,是目前最先进、有效的测量系统工具之一[6]。该系统主要由坐标测量、姿态测量、距离测量和影像采集构成。对应的传感器分别是高精度激光扫描仪、全球卫星定位系统(GNSS)、惯性测量设备(IMU)、里程计和全景相机。利用该系统可以快速获取高密集、高精度的激光点云数据,测量效率非常高,只需在道路上以一定的速度通过,就能快速采集两侧详尽的激光点云数据并同步获取与点云高精度匹配的实景图片[7]。车载LiDAR 测量系统如图1 所示。

图1 车载LiDAR测量系统
3 案例分析
3.1 工程概况
本文以邯郸冶陶镇某农村地籍测量为例进行分析。该地区属丘陵地带,地貌以沟壑、山川为主,房屋分布不均匀,建筑不规则。用传统测量方法效率低,而且院内界址点不易采集。为了提高工作效率和界址点位精度,引入车载LiDAR 系统,对于工作量繁重的农村地籍测量起到了很大帮助。
3.2 作业流程
基于车载LiDAR 系统进行地籍测量,大致分五个阶段:线路设计、数据采集、数据处理、质量检查、地籍成图。系统作业流程如图2 所示。

图2 车载LiDAR系统作业流程
3.2.1 线路设计
任务规划的目的是在满足测区全覆盖的前提下,结合已有资料,设计合理的行车扫描路径和扫描时间,避免设备长时间高负荷工作以及交通拥挤,控制GNSS失锁时间,同时布设好控制场,高效、经济、精确地采集测区测量数据。
3.2.2 数据采集
(1)调试设备
要确保系统各硬件接口和指示器正常,根据现场状况调整相机、激光等设备的参数,如光圈、激光功率、转速等。
(2)架设GNSS 基站
架设GNSS 基站是为了与车上GNSS 流动站进行联合差分解算与定位。根据扫描路线的长度和GNSS 基站的覆盖半径来选取基站架设位置,相邻基站间距不应超过覆盖半径的两倍,且需将道路完全覆盖。实际操作中,为保证解算精度,要考虑不同地域的信号遮挡情况,适当缩小基站与流动站间最大距离。
(3)采集数据
数据采集过程中,根据设定好的行驶计划和实时道路情况机动进行,要尽量匀速慢行,以求获取较细致的激光点云数据。采集完毕后,要注意及时拷贝保存数据。
3.2.3 数据处理
(1)测区点云扫描数据处理
首先,利用GNSS 和IMU 观测数据进行组合导航计算,以获取IMU 的精确位置和姿态数据。其次,将激光扫描的原始极坐标数据转换为激光扫描坐标系的平面坐标数据。再次,用激光扫描仪和IMU 间的相对旋转矩阵将激光平面坐标数据转换为IMU 坐标系下的平面坐标。最后,用IMU 的位置和姿态数据将IMU 坐标系下的点云数据转换为地理坐标系。测区局部彩色点云如图3 所示。

图3 测区局部彩色点云
(2)地籍信息提取与矢量化
基于抽稀后的点云数据,快速进行地物分类,并编写规则几何形状的自动提取算法,提取房屋、围墙、栅栏等地物信息,道路、植被等地形信息,房角点提取俯视图如图4 所示。最后根据提取的信息进行地物、地形连图处理,保证线形的连续性,提取后自动连图矢量化成果如图5 所示。
3.2.4 质量检查
对已布设的控制场进行精细扫描,在采集的控制场点云数据中找出空间位置与已测控制点相对应的激光点,将其坐标与控制点的实测坐标进行比对并计算误差;或者在采集路段选取易于分辨的特征点作为检查点,并用测量仪器量测其坐标值,与采集数据中的对应激光点坐标进行比对并计算误差,最后制作精度报告,如表1 所示。邯郸高台转扫精度统计的实测坐标由CORS RTK 测量获取。
根据《地籍测量规范》(CH 5002—94),一等界址点相对于临近控制点点位中误差不超过5cm,本项目质量检验中误差为3.1cm,满足地籍测量要求。

图4 局部房角点提取
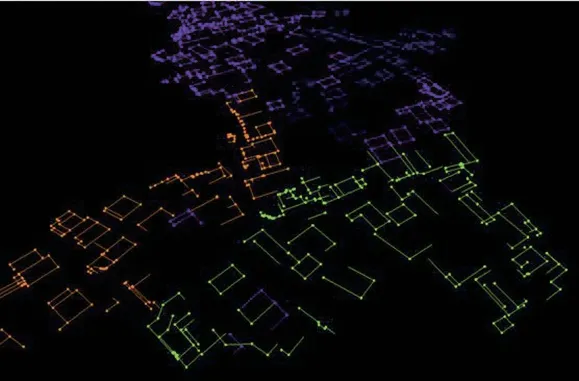
图5 提取后自动连图矢量化成果

表1 冶陶镇局部精度统计
3.2.5 地籍成图
基于上述对地籍要素特征的自动提取和自动连图成果,在制图软件上加载车载激光扫描系统获取的地籍地形要素和原始调查底图,要保证扫描数据和影像图完全套合。对于套合出现偏差的,以扫描数据为基准校正影像。结合外业获得的建(构)筑物长度、界址线、界址点到明显地物点的距离,以车载激光扫描数据的点为定位依据,线为定向依据,影像图为参考,用解译法完成地籍要素成图;对于未提取出的特征点,可利用俯视投影视角,根据地物的轮廓信息判断特征点和边界位置,提取特征点坐标。对于完全遮挡未采集到激光点云数据的区域,以影像图为定位和定向依据,利用装绘法成图。内业无法采集到的特征点数据,要进行人工实地补测。对各要素进行整饰,形成最终的地籍图。局部地籍图如图6 所示。

图6 局部地籍图
4 结语
通过车载激光扫描系统对邯郸冶陶镇某农村进行地籍实验,经过处理获得精确的点云数据信息,在点云的基础上进行界址点选取、宗地边界的提取等工作。经实测分析可知,该技术能够满足农村地籍测量精度要求,且效率较高。将车载移动测量系统成功应用于农村地籍测绘,为农村地籍测量提供了一种有效可行的方式,形成的一套农村地籍测绘技术解决方案,对农村地籍测量有重大的技术指导作用。