基于ICEEMDAN方法和频率解调的行星齿轮箱故障电流信号特征分析
2019-12-31管一臣冯志鹏
管一臣, 童 攀, 冯志鹏
(北京科技大学 机械工程学院,北京 100083)
行星齿轮箱具有结构紧凑、传动比大、承载能力强、传动效率高等特点,广泛应用于机床、船舶、风力发电机等大型机械设备中[1]。行星齿轮箱适用于高速大功率以及低速大扭矩的机械传动,在运行过程中常承受复杂的动态重载,相比一般机械设备更易发生故障。在重载时变的恶劣环境下,行星齿轮箱的关键部件(太阳轮、行星轮和齿圈)易发生磨损和损伤。作为变换扭矩和转速的关键环节,行星轮一旦故障,轻则导致整个动力传动链失效,重则机毁人亡[2]。因此,行星齿轮箱的故障诊断研究意义重大。
分析振动信号是较为成熟和常用的故障诊断方法。但振动信号的敏感度非常容易受传感器的安装位置和固定方式的影响[3];对于行星齿轮箱,振动信号会因振动传递路径的时变性产生调制现象,进一步加大故障诊断的难度。
电机电流特征分析(Motor Current Signature Analysis, MCSA),依据电机定子电流的波动反映扭矩的波动,从而对设备进行故障诊断[4-5]。MCSA属于无创检测方法,具有容易获取电流信号而不对原系统产生干扰、电流信号抗干扰强且衰减小等优点,近年来得到广泛关注[6]。
行星齿轮箱中存在齿轮故障时,采集得到的电流信号为调幅调频信号,调制频率与故障信息密切相关,故有效提取电流信号中的故障信号调制成分进行解调分析是利用MCSA诊断齿轮箱故障的关键。但实际测试中采集得到的电流信号成分复杂,不仅包含齿轮箱故障信息,还包含供电设备和电机状态等频率信息,信噪比较低,故对信号进行模式分解,降低背景噪声的影响十分必要。
经验模式分解(Enpirical Mode Decomposition, EMD)[7]是一种自适应的信号分解方法,可根据频率的不同将信号分解成多组不同频率成分的单分量信号。但EMD算法存在局部性,鲁棒性较差,存在模态混叠和停止条件缺陷等不足,影响分解效果[8]。Colominas等[9]提出了改进自适应噪声的完备经验模式分解,该方法可在自适应模式分解中弥补EMD的缺陷,并能有效降低背景噪声,为实现解调分析提供了较好的前提条件。
通过上述分析,本文提出了一种新的基于改进自适应噪声完备集合经验模式分解(Improved Complete Ensemble Empirical Mode Decomposition with Adaptive Noise, ICEEMDAN)和频率解调分析的行星齿轮箱故障诊断方法。采用该模式分解方法对电机电流信号进行模式分解,以此降低背景噪声的影响。根据电流信号调频特性,从分解得到的多组本征模式函数中选取包含故障信息的单分量作为敏感分量。最后对敏感分量进行频率解调得到其频谱,根据频谱中的峰值所在频率诊断故障。采用上述方法对行星齿轮箱实验信号进行了分析,成功诊断了齿轮箱中的齿轮故障。
1 改进自适应噪声完备集合经验模式分解
本文采用的ICEEMDAN方法,基于EMD分解原理,并在每次分解迭代过程中对信号添加可控的高斯白噪声,生成多个添噪信号并进行平均,以解决模态混叠的缺陷,增强抗干扰性;相较于CEEMDAN方法使用多个添噪信号的IMF(Intrinsic Mode Function)取平均作为原信号每次迭代产生的IMF,ICEEMDAN方法使用上一步迭代的残差减去本次迭代的多个添噪信号的残差的平均作为原信号每次迭代产生的IMF,能够进一步减少IMF中的噪声残留和混叠,改善分解效果。
ICEEMDAN具体算法步骤为:
步骤1构造N个含可控噪声的信号
(1)
式中:x为原始信号;w(n)为第n个0均值单位方差的高斯白噪声;e1为第1次分解时信号的期望信噪比,其值为e1=ε1σ(x)/σ(E1(w(n)));E1(·)为计算信号的第1个IMF的算子;ε1为设定的白噪声幅值;σ(·)为计算数学期望的算子。

(2)
式中:〈·〉为计算N个信号平均的算子。
步骤3将原信号x减去第1个残差s1,得到原信号的第1个IMF分量,记作I1
I1=x-s1
(3)
步骤4对于k≥2时,构造第k组N个含可控噪声的信号
(4)
式中:ek为第k次分解时信号的期望信噪比,其值为ek=εkσ(sk-1);Ek(·)为生成第k个IMF的算子。

(5)
步骤6将上一次残差sk-1减去本次残差sk,得到原信号的第k个IMF分量,记作Ik
Ik=sk-1-sk
(6)
2 频率解调
本文分析的是串联在行星齿轮箱输入轴的三相异步电动机的电流信号。齿轮故障导致故障齿接触时啮合刚度发生变化,引起周期性扭转振动。含扭振信号的行星齿轮箱扭矩T(t)可表示为
T(t)=T0+∑Tvibcos(2πfvibt+φvib)
(7)
式中:T0为恒定工况下扭矩的常值扭矩;Tvib,fvib和φvib分别为不同扭振成分的幅值、频率和初相位。
行星齿轮箱扭矩以变负载的形式传递至电机,有
(8)
式中:J为电机轴惯量;ω为电机转速;Tmotor为电机输出扭矩。
由于转速的波动,导致电机转子磁动势的波动,进而影响输入电流的大小,最终形成输入电流频率与故障频率的频率调制[10-12]。感应电机电流信号可表示为
x(t)=[A0+Avib(t)]cos[2πfet+Fvib(t)]
(9)
式中:Avib(t)为扭振引起的幅值调制,由于其值远小于1,在讨论频率调制时可忽略;Fvib(t)为扭振引起的频率调制,可表示为
Fvib(t)=∑Avibcos(2πfvibt+φvib)
(10)
式中:Avib,φvib分别为不同扭振成分在电流中的幅值和初相位。
根据此调频特性,选取本质模式函数中瞬时频率最接近输入电流频率的单分量作为敏感分量。
电流信号作为载波会被故障特征信号频率调制。为了避免Fourier频谱中由于频率调制而带来的复杂边带分析,故采用频率解调简化频谱结构,实现信号的解调分析。
对于选取出的敏感分量x(t),实现频率解调步骤如下:
步骤1构造x(t)对应的解析信号z(t)
z(t)=x(t)+jy(t)=a(t)exp[jα(t)]
(11)
式中:y(t)为对x(t)的希尔伯特变换
(12)
a(t)为瞬时幅值
(13)
α(t)为瞬时相位
(14)
步骤2为消除幅值调制的影响,对原信号进行包络归一,得到归一化后的信号h(t)
(15)
步骤3对归一化后的信号h(t)构造解析信号,按式(14)原理求其解析信号的瞬时相位,记作β(t),后计算β(t)对时间的微分,得到解析信号的瞬时频率f(t)
(16)
步骤4对解析信号的瞬时频率f(t)进行傅里叶变换,实现频率解调。
3 试验信号分析
3.1 试验说明
本文分析型号为NGW21的行星齿轮箱,其内部结构模型如图1所示。主要参数见表1。实验系统如图2所示。驱动电机为YP-50-4-4型4 kW三相异步电动机,由变频器控制其输出转频;电机输出轴经转速转矩编码器后与齿轮箱输入轴相连;齿轮箱输出轴与磁粉制动器相连。
为模拟齿轮局部故障,分别在太阳轮、齿圈和一个行星轮的某一齿上沿齿顶宽135°方向切除。
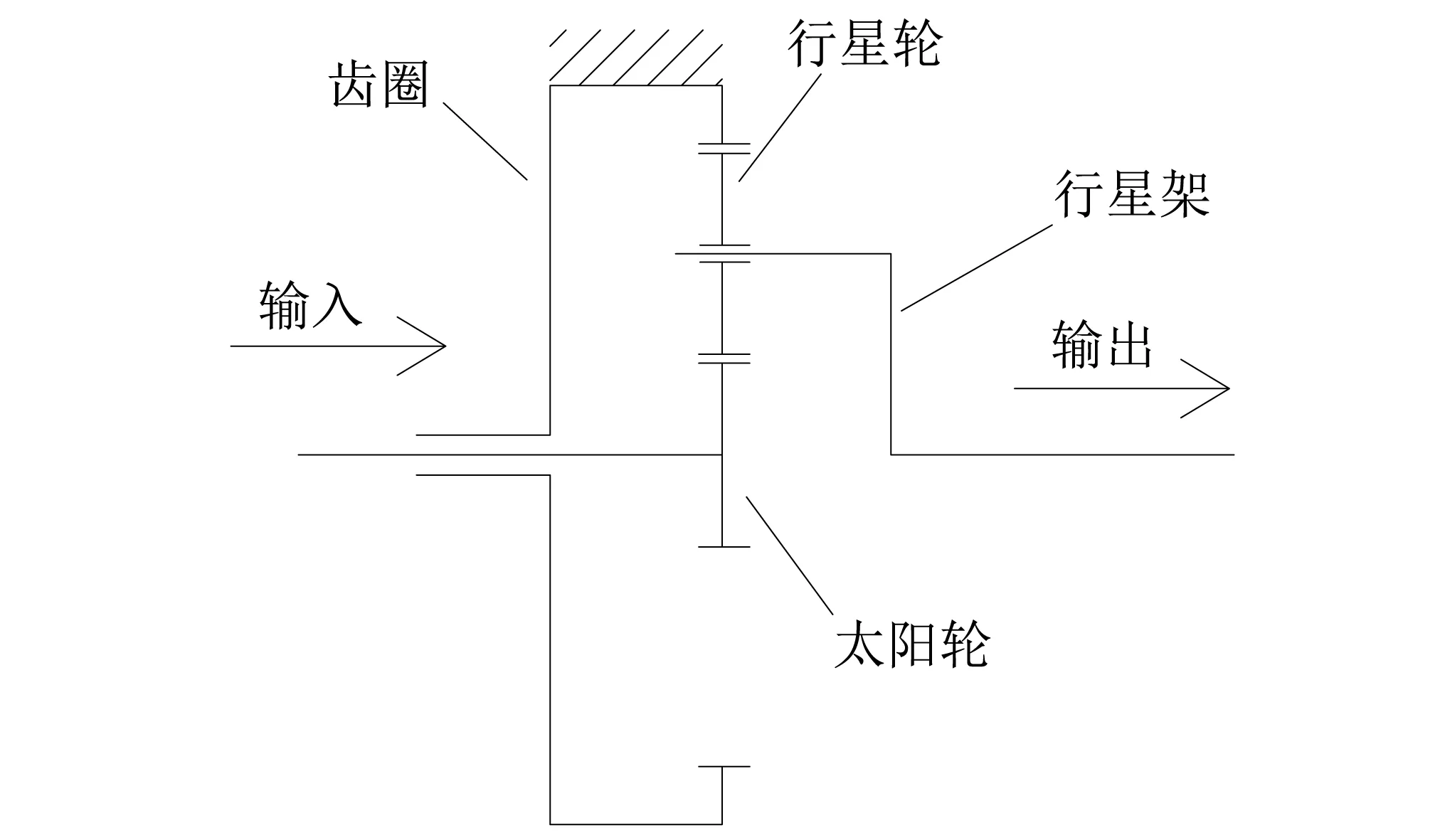
图1 行星齿轮箱结构模型Fig.1 Structure of planetary gearbox
试验中采集驱动电机的单相输入电流信号,采样频率为1 280 Hz,采样时间为20 s。设定输入电流频率为fe=32 Hz,则电机输出轴转频为f=16 Hz,齿轮箱输出轴转频(行星架转频)fc= 1.981 Hz。根据行星齿轮箱各齿轮齿数与啮合关系,计算得到太阳轮故障频率为fs=42.06 Hz,行星轮故障频率为fp=4.80 Hz,齿圈故障频率为fr=5.94 Hz。

表1 行星齿轮箱主要参数
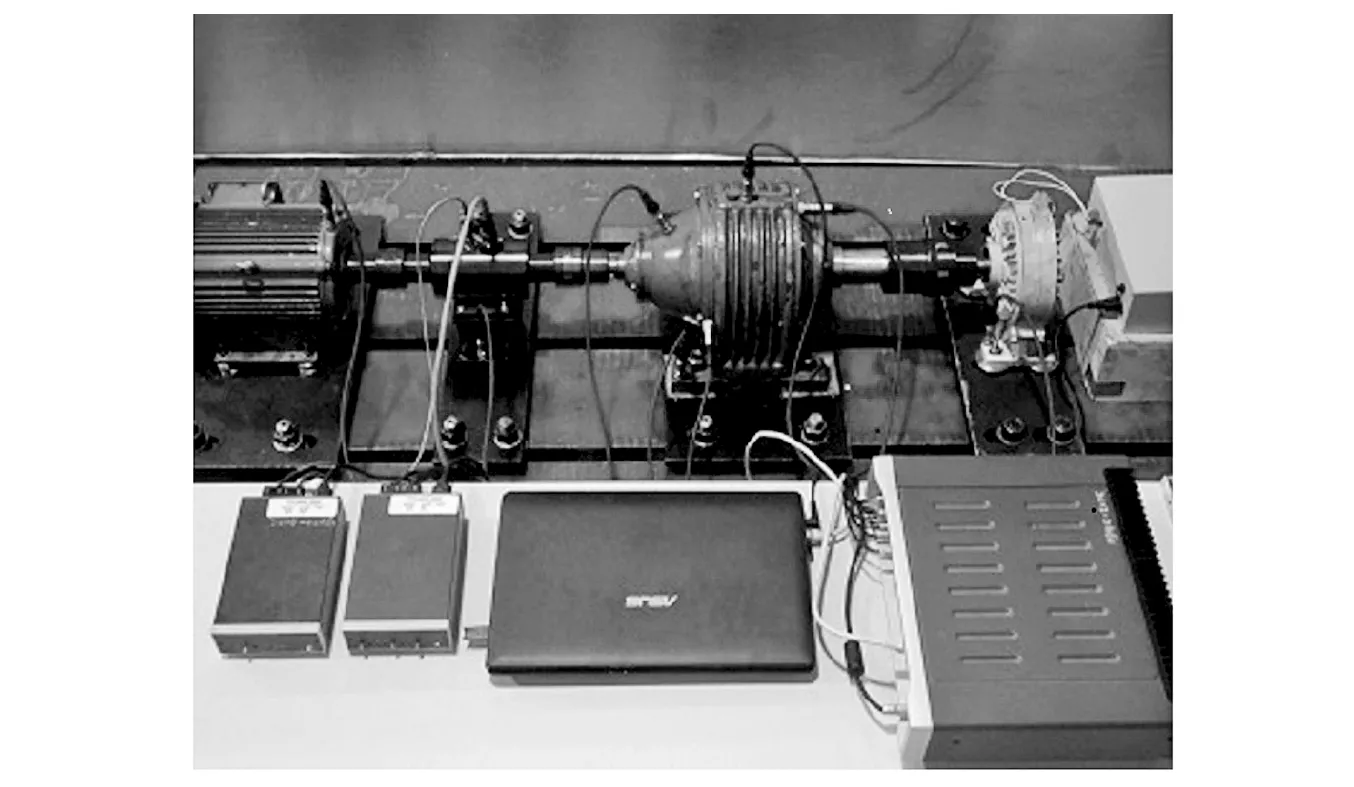
图2 实验系统Fig.2 Experiment system
3.2 正常状态
行星齿轮箱在正常状态下采集得到的电流信号局部时域波形,如图3(a)所示。可见定工况下波形稳定,主要为输入电流的正弦波。正常状态下的Fourier频谱,如图3(b)所示。可见在电流频率fe及其倍频处,出现明显的峰值,边带则出现在频率为fe±nf(n=1,2,…)处。另外,信号中还存在与行星架转频fc相关的特征频率fe+2f+2fc。
其计算EMD共分解得到12个IMF,如图3(c)所示。可见在9.6 s附近,多组IMF存在冲击波形,但原信号工况为匀速均载,并不存在冲击,则EMD出现模态混叠;IMF5~IMF12的瞬时频率均值依次减半,实际分解中不希望出现,则EMD出现停止条件缺陷。其计算ICEEMDAN共分解得到3个IMF,如图3(d)所示。可见分解中未出现冲击波形,符合工况设置;未出现类似白噪声分解的单分量,分解效果较好。
根据故障信号与电流信号的调频关系,选择瞬时频率在输入电流频率fe附近的IMF作为敏感分量进行解调分析。其得到的解调谱分别如图3(e)、图3(f)所示,可见在电动机轴转频f及其倍频处与齿轮箱输出轴转频相关频率2f+2fc处出现峰值,在故障特征频率处无峰值存在,说明行星齿轮箱不存在故障,与试验设定条件相符。图3(f)相较于图3(e),前者频谱中噪声幅值更小,说明ICCEMDAN能有效降低模态分解中的背景噪声。

图3 正常信号分析结果Fig.3 Analysis results of health gear fault signal
3.3 太阳轮故障
在太阳轮故障情况下,采集得到的电流信号局部时域波形,如图4(a)所示。可见主要为供电频率fe的正弦波,由于故障成分能量较小,调制现象不明显。Fourier频谱如图4(b)所示。可见同样存在fe的峰值以及频率在fe±nf(n=1,2,…)处的边带。除此之外,还出现太阳轮故障特征频率调制电流频率的现象,存在|fe±nfs|,(n=1,2,…)的边带,如|fe-fs|,|fe-2fs|和|fe+fs|,据此诊断出太阳轮局部故障。频谱图中还出现了频率为fe+3fc+fp的峰值特征,这是由于行星轮加工制造误差和微小缺陷的存在,以及安装误差的不可避免造成的。
其计算EMD共分解得到11个IMF。前3个IMF如图4(c)所示,可见EMD分解出现模态混叠和停止条件缺陷;其计算ICEEMDAN共分解得到3个IMF,如图4(d)所示。可见分解效果较好,未出现以上缺陷。
依据敏感分量选取准则,选择瞬时频率在输入电流频率fe附近的IMF作为敏感分量进行解调分析。其得到的解调谱分别如图4(e)、图4(f)所示,可见两种分解得到的敏感分量在频率解调后,除显示电动机轴转频相关频率nf(n=1,2,…)和齿轮箱输出轴转频相关频率2f+2fc的峰值外,均能清晰地显示故障特征频率fe峰值。图4(f)相较与图4(e),前者噪声幅值更小,ICEEMDAN表现降低背景噪声的优势。
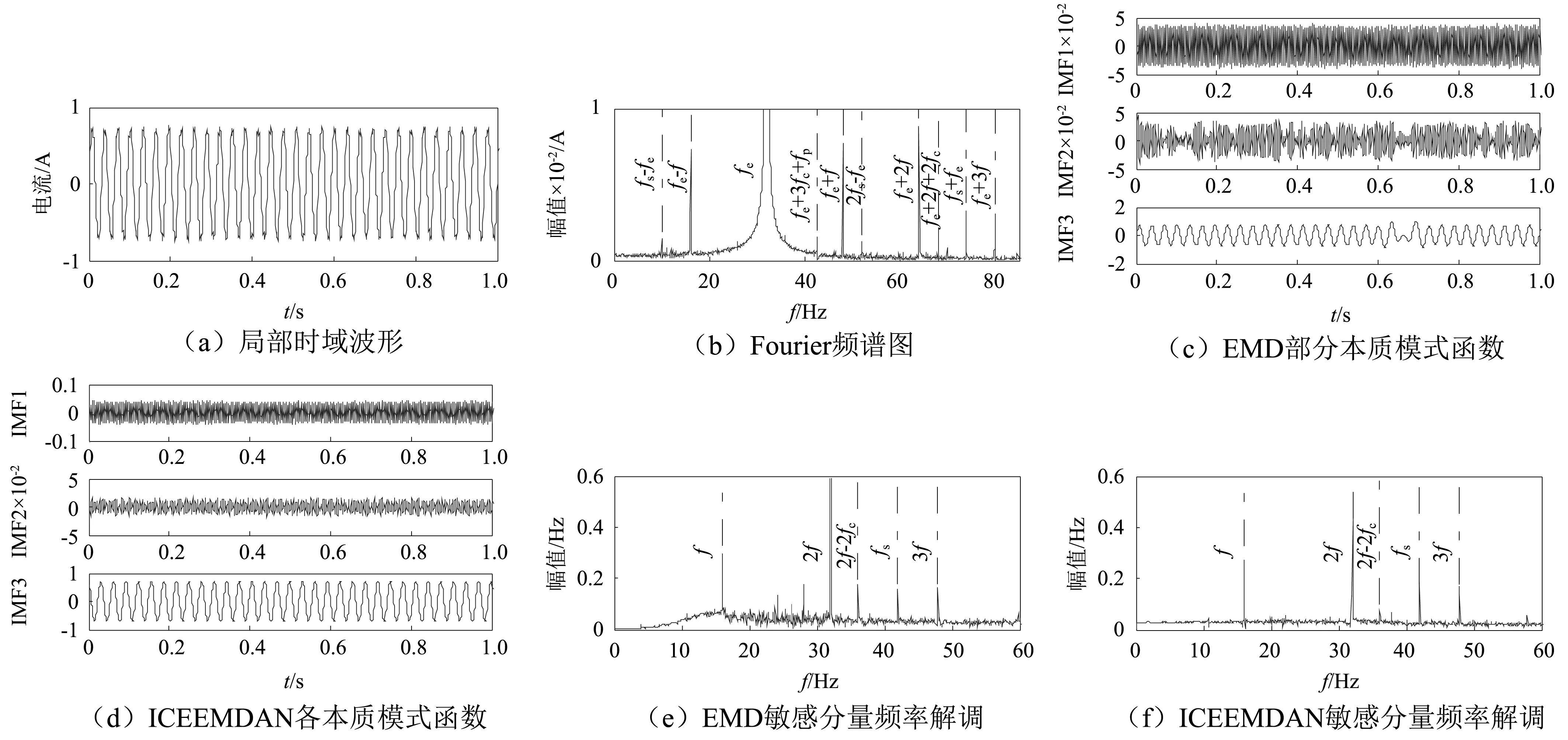
图4 太阳轮故障信号分析结果Fig.4 Analysis results of sun gear fault signal
3.4 行星轮故障
在行星轮故障情况下,采集得到的电流信号局部时域波形,如图5(a)所示。可见供电频率fe的正弦波,由于故障成分能量较小,调频现象不明显。行星轮局部故障状态下Fourier,频谱如图5(b)所示。可见出现边带fe±nfp(n=1,2,…),例如fe-3fp,fe-4fp,fe+4fp,fe+5fp和fe+6fp,这些边带频率与行星轮的故障特征频率fp相关,说明行星轮出现故障。
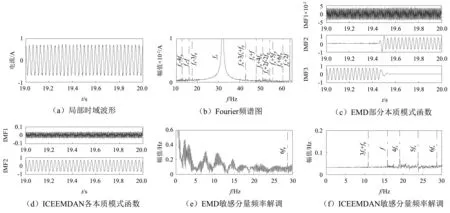
图5 行星轮故障信号分析结果Fig.5 Analysis results of planet gear fault signal
其计算EMD共分解得到11个IMF,前3个IMF如图5(c)所示,可见与正常状态类似,EMD分解出现模态混叠和停止条件缺陷;其计算ICEEMDAN共分解得到2个IMF,如图5(d)所示。可见分解效果较好,未出现以上缺陷。
依据敏感分量选取准则,选择瞬时频率在输入电流频率fe附近的IMF作为敏感分量进行解调分析。EMD的敏感分量频率解调结果如图5(e)所示。仅出现一组故障特征频率倍频(6fp)峰值,但噪声较大,峰值不明显,诊断失败。ICEEMDAN的敏感分量频率解调结果,如图5(f)所示。出现多组故障特征频率倍频(4fp,5fp,6fp)峰值,且由于噪声较小,频谱清晰,峰值较明显,说明所提出方法对故障特征提取的优越性。
3.5 齿圈故障
在齿圈故障情况下,采集得到的电流信号局部时域波形,如图6(a)所示。可见主要为输入电流频率fe的正弦波,且由于故障成分能量较小,调制现象不明显。齿圈局部故障状态下Fourier频谱,如图6(b)所示。出现齿圈的故障特征频率fr调制电流频率fe的边带,如fe-fr,fe+3fr,fe+4fr,以及fe+2f-fr,说明齿圈出现损伤,从而诊断出齿轮箱故障。另外,在该状态的Fourier频谱中,出现了与行星轮故障特征频率相关的峰值特征,如fe+4fp,fe+f+fp和fe+6fp,这是由于加工制造误差以及齿轮箱在拆装试验中存在的安装误差造成的。除此之外,由于在电流信号中,除了齿轮箱,还包含了传动系统中其他部件的信息,在低频段还存在某些频率特征未识别。在此以识别并提取与齿轮箱有关的频率特征为故障依据。
其计算EMD共分解得到11个IMF,前3个IMF如图6(c)所示,可见与正常状态类似,EMD分解出现模态混叠和停止条件缺陷;其计算ICEEMDAN共分解得到2个IMF,如图6(d)所示。可见分解效果较好,未出现以上缺陷。
依据敏感分量选取准则,选择瞬时频率在输入电流频率fe附近的IMF作为敏感分量进行解调分析。EMD的敏感分量频率解调结果如图6(e)所示。可见谱除电动机输出轴频率f峰值以及加安装误差造成的行星轮倍频6fp峰值出现外,无故障特征频率或倍频峰值出现,故障诊断失败。ICEEMDAN的敏感分量频率解调结果,如图6(f)所示。除电动机输出轴频率f和行星轮相关频率3fr+fp,3fp,4fp和6fp峰值外,还出现故障特征频率fr及其倍频4fr峰值,且峰值明显,说明所提出方法对故障特征提取的有效性。
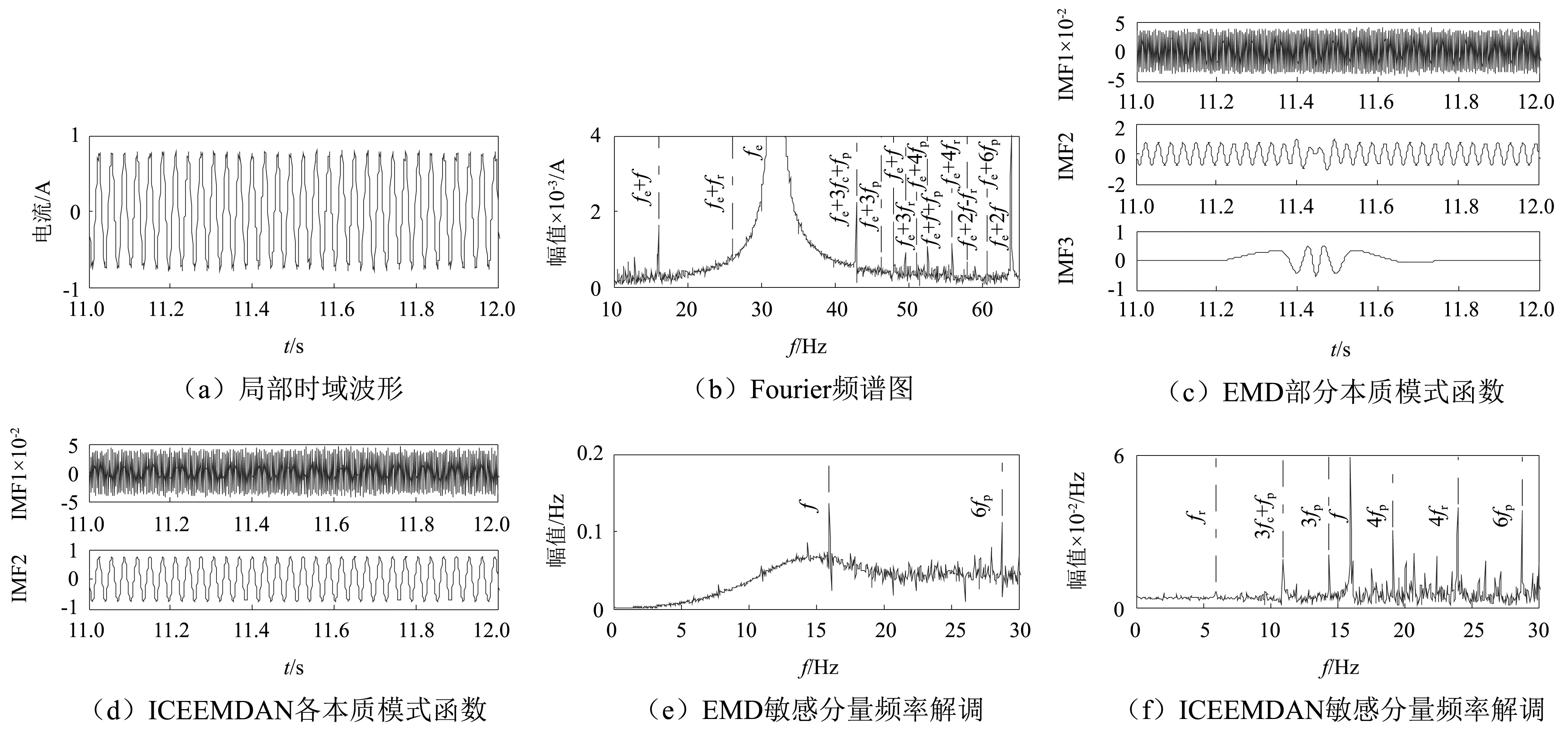
图6 齿圈故障信号分析结果Fig.6 Analysis results of ring gear fault signal
4 结 论
针对齿轮箱的不同状态,本文运用ICEEMDAN方法,实现对含有多种复杂背景噪声的多分量信号分解,在电流频率附近选择敏感分量进行频率解调,分别提取得到太阳轮、行星轮以及齿圈的故障特征频率及其倍频,从而成功诊断了行星齿轮箱的三种齿轮故障,验证了所提出方法的有效性。
相较于EMD方法,ICEEMDAN方法解决了模态混叠和停止条件缺陷等不足,分解得到的本质模式函数噪声成分更小,尤其对频率低、幅值小的行星轮故障和齿圈故障的诊断效果有较大改善,验证了所提出方法的优越性。
