无人机防相撞空中威胁态势的探测与告警研究
2019-12-31王倩张宝华周志靖孙静娟
王倩,张宝华,周志靖,孙静娟
(1.西京学院 理学院,西安 710123) (2.空军工程大学 空管领航学院,西安 710051)
0 引 言
无人机飞行中时常引发不安全事件,其中一个重要原因是缺乏有效技术手段,在无人机与正常飞行的航空器发生飞行冲突甚至空中危险接近、飞行碰撞时无法进行准确预警,使无人机无法有效避让目标航空器。对无人机飞行防相撞空中威胁态势预警问题的研究,致力于以技术手段降低无人机飞行不安全事件发生率,从而降低我国空管人员工作压力。
国外相关研究起步早,并取得了诸多成果。20世纪60年代,P.G.Reich[1]依据固定间隔构建立方体保护区的思想,提出了飞机碰撞风险模型。随后,学者们进行了改进,例如P.C.James等[2]根据最小安全飞行间隔标准将碰撞区定义为三维圆柱体;A.C.Manolis等[3]基于固定时间或距离将避撞区定义为球形区域;N.L.Folton[4]提出基于航空器几何分布建立Volonoi多边形,对目标航空器周围的航空器数目以及与它们之间发生飞行冲突的概率进行计算;J.Goss等[5]提出基于飞行状态信息的混合几何算法以探测三维空间内的空中威胁态势;P.J.Nordlund等[6]研究了基于时间域上的空中威胁态势风险的近似计算方法。以上成果已部分应用于空中交通管理实践中,空中交通预警与防撞系统(TCAS)就是这方面的典型代表。国内对该项研究虽然起步晚,但研究水平提升较快。何晓薇[7]研究了TCAS报警策略、避让与协调解脱的选择以及相关的干扰抑制技术;李丹等[8]提出以带约束的布朗运动模拟飞机飞行,用于短期飞行冲突的探测;顾博[9]设计了椭圆球状保护区模型,根据运动学方程对空中威胁态势预警;许敬刚等[10]研究了二维无人机动态避撞区建模方法,利用无人机和入侵机飞行信息,在机动性能约束下对两机进行碰撞检测。由上述研究可以发现,学者们在研究威胁态势探测问题时,大都是依据静态保护区概念,对所探测目标信息的依赖性高。而现实中,在混合空域环境内运行的无人机,通常是特殊用途无人机,其他航空器相对于无人机来说,多是动态的、非合作的和贫信息的,这给无人机空中威胁态势探测带来了很大困难,进而影响到无人机防相撞预警的效率和质量。
基于此,本文采用一种三维空间环境下的无人机空中威胁态势探测与告警方法,基于入侵机的预测航迹,将无人机静态保护区、动态避撞区与入侵机未来位置的关系作为空中威胁态势预警的依据,进行无人机与入侵机的飞行冲突、空中危险接近和飞行碰撞的预警。
1 滑动窗多项式拟合预测法
准确的航迹预测是无人机防相撞空中威胁态势预警技术的基础,可为后续研究提供数据支撑。滑动窗多项式拟合法仅需要少量历史数据即可构造多项式拟合方程,实现对时间序列节点上未来值的实时预测,在航迹预测领域得到了大量应用,尤其适合解决非合作航空器的自主式航迹预测问题[11]。基于航迹预测效果考虑,本文采用张建祥等[12]提出的改进滑动窗多项式拟合法预测无人机的航迹。
2 静态保护区原理
无人机防相撞空中威胁态势预警技术中的静态保护区模型主要用于探测飞行冲突趋势与空中危险接近趋势。参照现行空中交通管理规则,以航空器质心位置作为中心点,按照航空器水平与垂直间隔标准构建圆柱体模型,即可得到无人机圆柱体静态保护区,如图1所示。

图1 圆柱体保护区示意图Fig.1 Schematic diagram of cylinder protection zone
在图1中,H1为垂直间隔标准,L1为纵向与横向间隔标准。无人机圆柱体保护区为内外两层,外层用以探测飞行冲突趋势,内层用以探测空中危险接近趋势。任何进入无人机保护区的其它航空器,都视为与无人机之间有飞行冲突。现以外层保护区为例说明基于静态保护区探测空中威胁态势的原理。
在以无人机为原点的空间坐标系中,无人机位置为(0,0,0),入侵机位置为(x,y,z),外层圆柱体保护区范围可描述为

-H1≤z≤H1|x,y,z∈R}
(1)
设当前时刻t=k1,令入侵机相对无人机的预测航迹为X1(t),入侵机与无人机距离随时间增加而接近,即预测的无人机与入侵机发生飞行冲突的时刻为
t1=min {t|X1(t)∈G1}
(2)
式中:t1为在预测的入侵机相对航迹中最早位于无人机外层静态保护区内部的航迹点对应的时间;X1(t)与(t1-k1)为飞行冲突趋势告警信息,在(t1-k1)时间之后无人机与入侵机将发生飞生冲突。
同理,在当前时刻t=k2时的无人机空中危险接近趋势探测原理如下:
(3)
式中:t2为预测的无人机与入侵机发生空中危险接近的时刻;X1(t)与(t2-k2)为空中危险接近趋势告警信息。
3 避撞区划设算法
在构建基于无人机三维空间紧急避撞最优机动轨迹的两机距离函数模型时,必须先设定如下假设:
(1) 当无人机与入侵机相遇时,无人机主动对入侵机进行避撞,无人机在机动避撞前保持原飞行状态飞行,而入侵机在整个相遇过程中沿预测航迹飞行;
(2) 无人机进行机动时,不考虑控制参数改变的动态过程以及作动系统的延迟效应,也不考虑因燃料消耗而导致的无人机重量改变。
以无人机与入侵机迎面相遇为例,无人机开始采取紧急避撞最优机动后两机之间距离函数D(t,m)的计算模型如式(4)所示。
(4)

无人机对入侵机的紧急避撞,可等效为无人机静止不动时入侵机对无人机的紧急避撞。当无人机和入侵机间的最接近点距离Dmin小于最小安全距离Dlim(根据碰撞风险模型,碰撞模板的长、宽、高通常取飞机机身长、翼展、机身高的两倍,在此基础上加上一定的裕度,即得到最小安全距离),可判定两架飞机会发生碰撞,不难理解,使Dmin不小于Dlim的m值集合,即{m|Dlim≤Dmin},代表无人机对于入侵机的飞行避撞区域,入侵机到达此段航迹之中的任意一点时,无人机均可安全避撞入侵机,也就是划设避撞区等价于求取最大m值。
本文无人机避撞区划设算法参考文献[13-14]中的算法,具体实现流程如图2所示。

图2 算法实现流程图Fig.2 Flow chart of algorithm realization

4 威胁态势探测与告警流程
基于航迹预测的无人机防相撞空中威胁态势探测告警仿真计算流程,如图3所示,由于无人机动态避撞区中最大m值的求解步骤已作论述,这里就不再赘述。
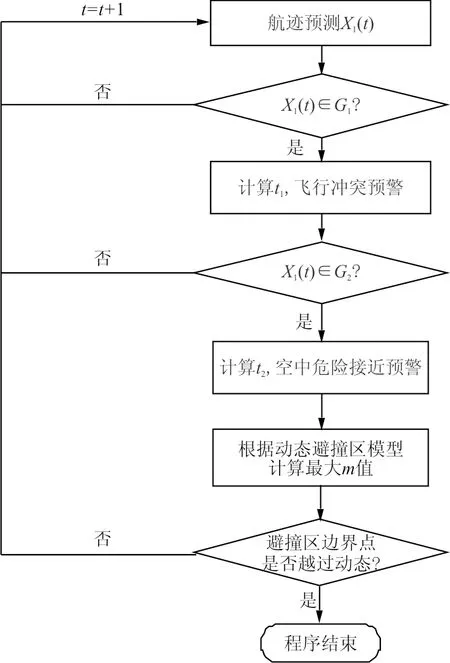
图3 空中威胁态势预警仿真流程图Fig.3 Flow chart of air threat situation warning simulation
5 实验仿真
在MATLAB 2014a仿真环境中,参照有人机标准[15-16],设定圆柱体静态保护区参数L1=6 000 m,H1=300 m,L2=3 000 m,H2=100 m,设定最小安全距离Dlim=100 m。无人机机动性能参数设置[17]:最大切向过载为3,最小切向过载为1;最大法向过载为9,最小法向过载为0;最大滚转角为180°。设定ξ=15 m,q=0.05 s。
利用滑动窗多项式拟合法对入侵机航迹进行预测后,按照图3的仿真流程进行计算,结果如表1所示。
在表1中,提前计算出无人机机动轨迹集以供仿真程序调用,时间指针每前进一步,飞行冲突趋势探测与空中危险接近趋势探测的仿真时间大约都是0.007 s,而飞行碰撞趋势探测的仿真时间约为0.085 s。
本文方法所提供的告警信息,除了表1中的时间信息外,还会提供入侵机预测航迹中的位置点信息。为直观展示仿真结果,本文选取某些时间点的计算结果绘制成图形,分别展示了飞行冲突趋势、空中危险接近趋势与飞行碰撞趋势的探测告警过程。
对于飞行冲突趋势的探测告警,选取当前时间点为156 s,在三维空间中绘制飞行冲突趋势探测情况,如图4所示。
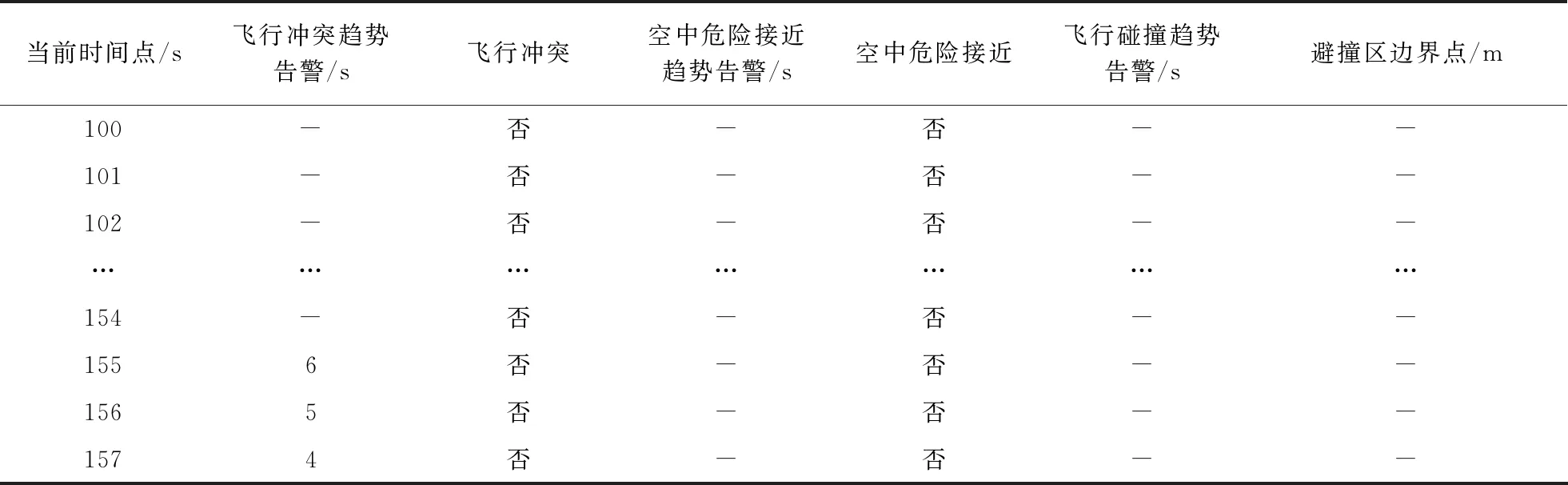
表1 空中威胁态势预警表Table 1 Air threat situation warning table
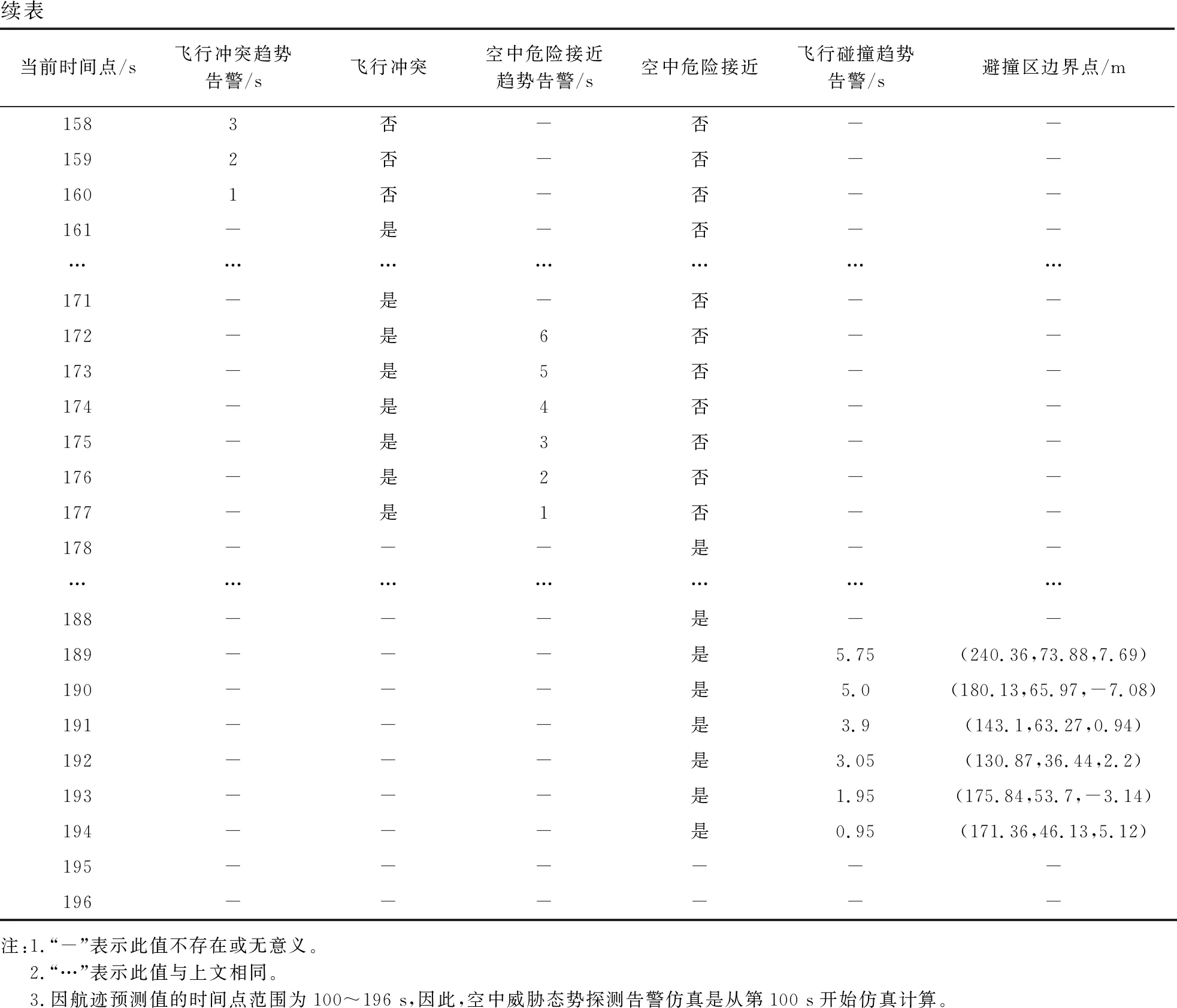
续表当前时间点/s飞行冲突趋势告警/s飞行冲突空中危险接近趋势告警/s空中危险接近飞行碰撞趋势告警/s避撞区边界点/m1583否-否--1592否-否--1601否-否--161-是-否--…………………171-是-否--172-是6否--173-是5否--174-是4否--175-是3否--176-是2否--177-是1否--178---是--…………………188---是--189---是5.75(240.36,73.88,7.69)190---是5.0(180.13,65.97,-7.08)191---是3.9(143.1,63.27,0.94)192---是3.05(130.87,36.44,2.2)193---是1.95(175.84,53.7,-3.14)194---是0.95(171.36,46.13,5.12)195------196------注:1.“-”表示此值不存在或无意义。2.“…”表示此值与上文相同。3.因航迹预测值的时间点范围为100~196 s,因此,空中威胁态势探测告警仿真是从第100 s开始仿真计算。
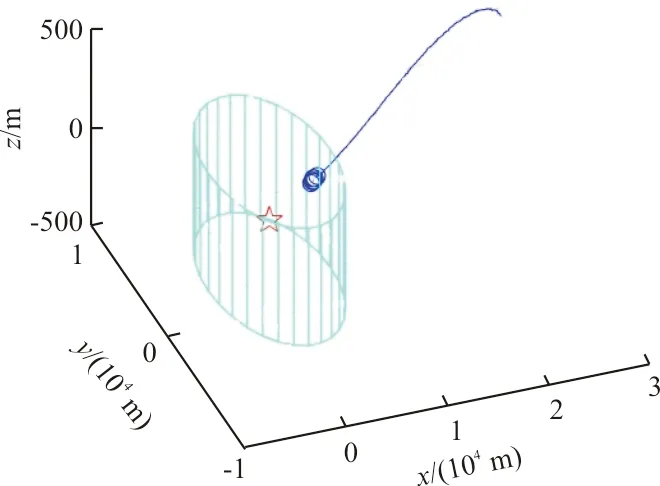
图4 飞行冲突趋势探测三维图Fig.4 3D graph of flight collision trend detection
为清楚描述156 s时入侵机相对无人机的预测航迹侵入外层静态保护区产生飞行冲突趋势的情形,本文对飞行冲突趋势探测的三维图进行了平面投影操作,将飞行冲突趋势探测三维图分别投影到在xy、xz与yz平面中,如图5~图7所示,图中圆柱体区域为无人机外层静态保护区,五角星为无人机位置,实线为入侵机相对无人机航迹,连续的“○”形标识为入侵机相对无人机的预测航迹。

图5 飞行冲突趋势探测xy平面图Fig.5 xy plan of flight collision trend detection

图6 飞行冲突趋势探测xz平面图Fig.6 xz plan of flight collision trend detection

图7 飞行冲突趋势探测yz平面图Fig.7 yz plan of flight collision trend detection
从图5~图7可以看出:在156 s时,入侵机航迹在yz平面上已侵入无人机外层静态保护区,而在xy和xz两个平面上其预测航迹也侵入了无人机外层静态保护区,所以,在156 s时产生了飞行冲突趋势告警。
对于空中危险接近趋势的探测告警,选取当前时间点为175 s,在三维空间中绘制空中危险接近趋势探测情况如图8所示。
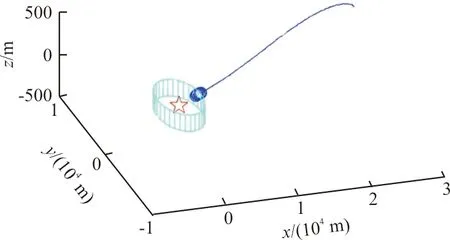
图8 空中危险接近趋势探测三维图Fig.8 3D graph of near midair collision trend detection
同样,将空中危险接近趋势探测三维图分别投影到xy、xz与yz平面中,如图9~图11所示。其中,圆柱体区域为无人机内层静态保护区,图中标识与图4~图7相同。从图9~图11可以看出:在175 s时入侵机航迹在yz平面上已侵入无人机内层静态保护区,而在xy和xz两个平面上,其预测航迹也侵入了无人机内层静态保护区,所以,在175 s时产生了空中危险接近趋势告警。
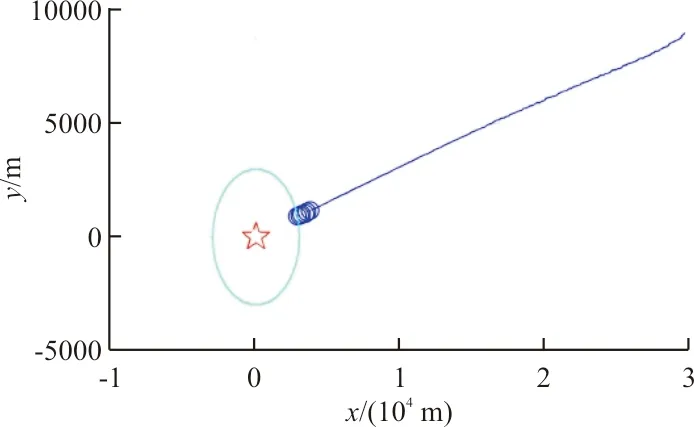
图9 空中危险接近趋势探测xy平面图Fig.9 xy plan of near midair collision trend detection
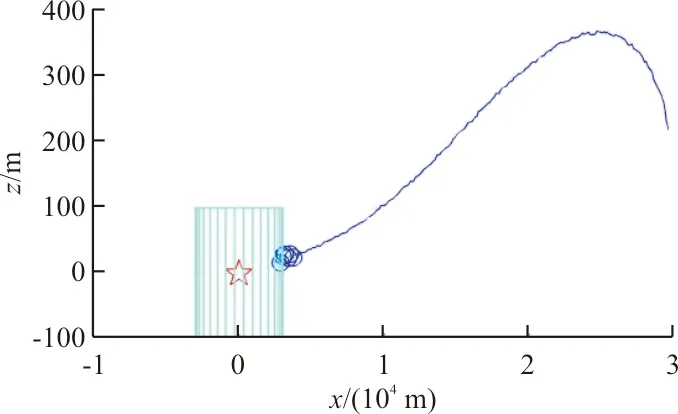
图10 空中危险接近趋势探测xz平面图Fig.10 xz plan of near midair collision trend detection

图11 空中危险接近趋势探测yz平面图Fig.11 yz plan of near midair collision trend detection
对于飞行碰撞趋势的探测告警,选取当前时间点为193 s,在三维空间中绘制飞行碰撞趋势探测情况如图12所示。同样为展示仿真结果,将飞行碰撞趋势探测三维图分别投影到xy、xz与yz平面中,如图13~图15所示。在图12~图15中,图中标识与图4~图7相同,可以看出:预测航迹中的菱形标识为无人机动态避撞区边界点;预测航迹的起点即为当前入侵机相对无人机的空间位置,航迹末端的星型标识为无人机开始机动后,处于相对航迹中的入侵机与无人机距离的最近点。

图12 飞行碰撞趋势探测三维图Fig.12 3D graph of flight collision trend detection

图13 飞行碰撞趋势探测xy平面图Fig.13 xy plan of flight collision trend detection
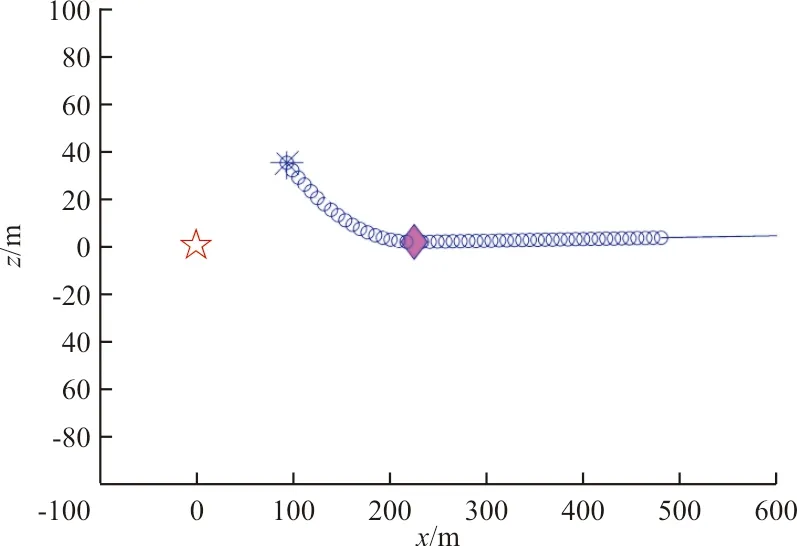
图14 飞行碰撞趋势探测xz平面图Fig.14 xz plan of flight collision trend detection
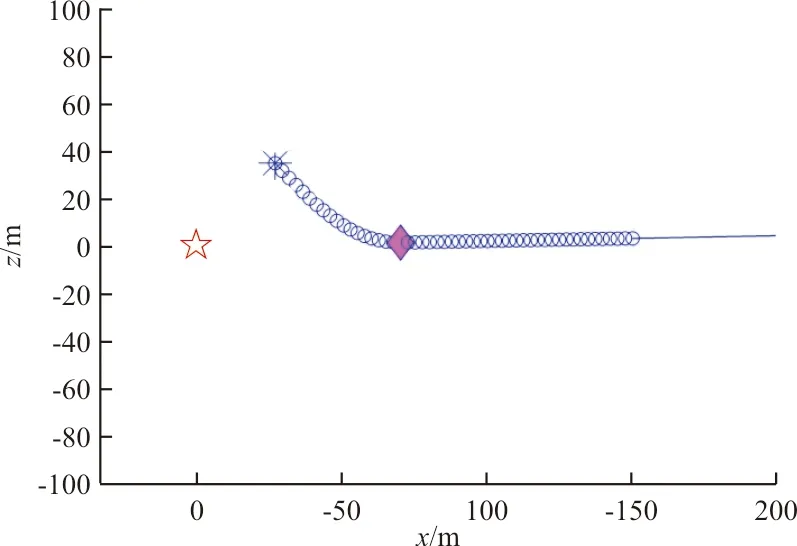
图15 飞行碰撞趋势探测yz平面图Fig.15 yz plan of flight collision trend detection
在相对坐标系中,无人机避撞入侵机表现为入侵机避撞无人机,图12~图15不仅展示入侵机当前位置与无人机动态避撞区边界点的空间位置关系,同时,在预测航迹基础上,展示了无人机紧急避撞最优机动后入侵机的航迹变化。无人机在入侵机位于动态避撞区边界点,即菱形标识位置时开始做紧急避撞最优机动,使得无人机与入侵机的最近距离与最小安全距离十分接近,以上飞行碰撞趋势探测图所描述的就是此情形;若无人机在入侵机位于紧急避撞区边界点之后开始进行紧急避撞,无人机与入侵机将不可避免发生飞行碰撞;若无人机在入侵机位于紧急避撞区边界点之前开始避撞,则能够得到更大安全余度,同时将提供针对入侵机的无人机紧急避撞最优机动的咨询,提高无人机飞行安全水平,这是研究飞行碰撞预警的意义所在。
6 结 论
(1) 在混合空域环境中,入侵机相对于无人机是非合作和贫信息的,这给空中威胁态势的探测告警带来了困难。利用滑动窗多项式拟合法进行自主非合作式的航迹预测,为空中威胁态势的探测告警提供可靠有效的入侵机航迹预测信息。
(2) 在航迹预测基础上,结合无人机与入侵机飞行信息,在三维空间环境中构建了无人机紧急避撞轨迹的动态避撞区模型,既发挥了无人机的机动优势,又提高了无人机动态避撞区划设的准确度。仿真结果验证了它的有效性和可行性。
(3) 在仿真计算中,为了保证无人机动态避撞区划设的实时性,并没有考虑大气环境、机体重量、作动系统延迟与空间变化等因素,这无疑会影响无人机动态避撞区划设的准确度,在后续工作中将作进一步研究。
