变量式喷药装置的设计
2019-12-27高诗博蔡有杰任鹏飞
高诗博,李 强,蔡有杰,包 丽,任鹏飞
(齐齐哈尔大学机电工程学院,黑龙江 齐齐哈尔 161006)
0 引言
在科学技术水平飞速发展的今天,农业生产向科技创新转变势在必行。为使农药行业发展水平与农业科技转型相对应,应提高现有喷药技术,用农药科技助力农药行业转型。目前农业在病虫害防治中存在的主要问题表现在:施药装置喷洒农药效果不佳,药物的有效利用率较低;施药量控制难度大,为了达到杀虫效果,往往出现过量使用的情况,使得药物残留超标,同时对环境造成一定的污染,为环保治理带来诸多困难;喷药装置结构设计比较简单,工作方便性和可控制性较差,可靠性不高;施药装置控制系统普遍为压力或者流量的单一化控制方式,系统控制能力不够完善。
随着人们对食品安全认识的逐步提高,消费者对粮食、水果表面农药残留问题特别重视,对当前的农药喷洒技术及喷药机械装置有了更高的要求,因此,合理控制农药喷洒成为确保粮食产量及粮食安全的重要手段。合理控制农药喷洒涉及到农药制剂配制与研究的问题、农药喷洒的技术问题以及喷药装置的控制问题,这三个问题的解决方法相辅相成,互相制约。
国外关于变量式施药研究起步较早且有较大进展,采用GPS技术设计农药喷施系统,并进行了相关的实际农田试验,实现了农药使用量的减少。但GPS定位技术在确定地理位置时存在误差,且受光照等因素影响,施药精度会大幅下降。除此之外,GPS系统需要投入其他检测、遥感技术对病虫害信息进行采集,才能达到预期效果,成本较高。同时,施药装置控制系统大多数与计算机相连,施药参量的数据采集需经计算机进行数据处理才能得出控制参数,在具体使用过程中容易出现问题,比如机器视觉技术在施药过程中存在延迟时间较长、喷洒装置需要许多设备来收集、精准施药中容易产生误喷等。为了研究出适合我国需要的施药装置,实现精准喷药的目标,国内学者们借鉴国外的经验,对变量施药装置展开了相关研究。
当前生产中使用的农药喷洒技术及喷药装置相对比较落后,农药有效利用率较低,使得药物残留超标,造成一定的环境污染,装置使用者时有中毒的现象发生,因而设计可控量的变量式喷药装置尤为重要。为此设计了一种变量式喷药装置,该装置的控制系统通过对自然环境如风速、空气温度和湿度、光照、单位面积施药量及施药幅宽等多数据进行分析与计算,通过控制该装置的电磁阀开关,从而实现变量喷药。
1 喷药装置的总体结构
喷药装置的结构如图1所示,主要由药箱、万向轮、喷头、水泵、电机、螺套、螺杆、平面轴承、转轴、环形套、药液流管、电磁阀、圆形喷面板等组成。
喷药装置中药箱的上端中心设置水泵,水泵与药箱连通,药箱的顶端设置支架,支架上装有固定电机,电机的输出轴紧固连接在带内螺纹的螺套内,螺套内装入带外螺纹的螺杆,螺杆的顶端连接平面轴承的底面,平面轴承顶面通过转轴连接环形套,环形套内装入药液流管,药液流管中设置电磁阀,药液流管的顶端设置喷头作为执行机构。药液流管的底端均连通空心管,空心管连通水泵的排水口处。药液流管内设置伸缩管,2个药液流管均为波纹管,伸缩管起到支撑波纹管的作用,螺套、螺杆、平面轴承、转轴与环形套可以控制喷头的方向,喷头通过弯头连接药液流管。
2 喷头结构及容量调节机构
喷头结构如图2—3所示,包括圆形喷面板、出量控制挡片、出药孔和L形秆。圆形喷面板上布有出药孔,每个出药孔设置1个控制出量的挡片,每个挡片和L形杆相连接,出药孔上端设置滤网,滤网开有出口,使L形杆移动,多个L形杆汇总后在喷头的突起处可向外拉拽,控制圆形喷面板的出药量。

图1 喷药装置的总体结构Fig.1 General structure of spraying device

图2 喷头的结构Fig.2 Nozzle structure

图3 出药孔剖视图Fig.3 Section view of discharge hole
3 喷药装置的控制
为使喷药装置达到变量施药的目的,要求精准控制上述药液流管上设置的电磁阀,通过电磁阀的打开时间控制出药量,也可通过喷头出药孔的打开面积调节水压,调节出药量,其工作流程如图4所示。通过装置上的控制开关进行控制,控制开关打开时,将控制信号经转换口RS-232/485传输至接口芯片MAX485中,接口芯片MAX485将接收的数据传输至单片机AT89S52,单片机AT89S52通过固态继电器使得电压升高后,用来控制电磁阀的打开与关闭。

图4 电磁阀控制流程图Fig 4.Solenoid valve control flow chart
装置中电机主控制电路如图5—6所示。装置串行口JP1的引脚l及引脚2通过RS-232/RS-485转换器引出的A、B线连接上位机。因为上位机的RS-232串行口使用的是EIA电平,且AT89S52单片机的串行通信是来自TXD(发送数据)和RXD(接收数据),从而进行全双工通信,是低电平,保证PC机与AT89S52单片机之间能可靠地利用RS-485总线进行串行通信,选取MAX485接口模块SN75176实现电平间的信号转换。

图5 电机主控电路Fig.5 Motor main control circuit
接口芯片是靠+5 V的单一电源进行供电,输出的额定电流为300 μA,形式为半双工通信模式。接口模块的R端和D端分别为接收器的输出以及驱动器的输入端,和AT89S52相连时,仅使AT89S52的RXD和TXD分别与R和D连接。RE端和DE端分别为接收和发送的使能端,当RE地址为1时,装置进行接收信号;当DE地址为1时,装置进行发送信号。由于MAX485控制在半双工形式,故而仅使用AT89S52的一个管脚控制两个引脚更为方便,该装置采取P1.0引脚,采用光耦TILll7实现连接。A端和B端分别为接收和发送的差分信号端,当B引脚的电平低于A端时,表示发送的数据为1;而B端的电平高于A端的时候,表示发送的数据为0。

图6 驱动电路Fig.6 Driving circuit
接口芯片的R端和D端运用光电耦合器与AT89S52的RXD和TXD进行连接,采用光耦目的是防止电气互相干扰。AT89S52的P2.7引脚与固态继电器输入端的正极相连接,主机板的接地端与继电器输入端的负极相连接,SSR的信号端与喷药装置上的电磁阀相连,完成电磁阀开关的自动控制,R端及D端需要配置上拉电阻R5及R6。
4 仿真分析
为了对系统的模糊控制算法进行验证,对模糊控制器的控制效果进行分析,采用simulink软件,模拟上述变量施药装置的控制模式。在模拟过程中,使用2个随机信号系统的输入,通过取样后,将输入数据的离散化向模糊控制器传送。根据模糊控制器的输入电流进行决策处理,通过模糊控制获得计算反模型化损失,测出喷药装置的可控制响应时间和反应灵敏程度。仿真数据结果如图7—8所示。
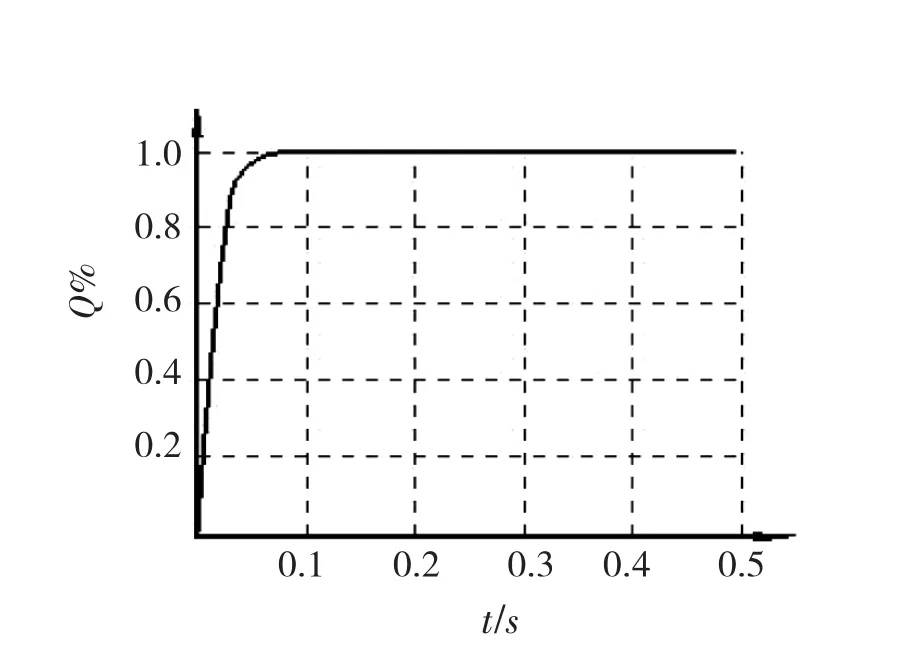
图7 施药量模糊控制响应时间图Fig.7 Response time diagram of fuzzy control of dosage

图8 压力模糊控制响应时间图Fig.8 Pressure fuzzy control response time diagram
5 结论
在构建模糊压力控制模型基础上,进行了压力和施药量模糊控制算法仿真,其仿真结果为:在正常单位信号输入条件下,施药装置系统压力和施药流量模糊控制系统的响应时间分别为45 ms和40 ms,表明该装置采用模糊控制对精准施药系统响应时间较快,能达到精准施药的目的。喷药装置结构合理,能实现变量喷药,在系统对电磁阀打开时间及打开面积等进行有效控制下,可调节喷头出药量,具有工作压力稳定、脉动小、便于操作等特点,变量式喷药装置满足不同药液喷洒的工作要求,在当今现代农业生产转型及发展中具有重要意义。
