基于舵机控制的模拟曲射电磁炮的设计与实现
2019-12-27关志艳温志鹏冯喜喜
关志艳,温志鹏,冯喜喜,文 杰
(山西大学商务学院信息学院,山西 太原 030001)
0 引言
全国大学生电子设计竞赛是教育部倡导的大学生学科竞赛之一,是面向大学生的群众性科技活动,对提高大学生的实践动手能力有着非常积极的作用。
依据2019年8月全国大学生电子设计大赛H题-模拟电磁曲射炮,设计制作一个一键瞄准和射击的电磁炮,该题目融合了传感器、舵机控制、单片机等多项硬件技术和电磁学相关知识,为有效的对其进行控制,还要加入软件算法。模拟曲射电磁炮是典型的软硬件技术的结合体,具有极大的研究价值,其中云台控制是电磁炮要解决的一个主要技术问题。
1 具体要求及分析框图
总体分析2019年全国大学生电子设计大赛的所有题目,都必须用到单片机的知识,这也正是相关专业学生学过的一门专业课,电子大赛能够让学生将课堂上的知识在实践中应用。
1.1 具体要求
1) 电磁炮能够将弹丸射出炮口;
2) 环形靶放置在靶心距离定标点200~300 cm间,且在中心轴线上的位置处,键盘输入距离d值,电磁炮将弹丸发射至该位置,距离偏差的绝对值不大于50 cm;
3) 用键盘给电磁炮输入环形靶中心与定标点的距离d及与中心轴线的偏离角度α,一键启动后,电磁炮自动瞄准射击。
1.2 整体框图
如图1所示,当传感器检测到信号发生变化时,立即将信息传到单片机,同时会发送高低电平给单片机的I/O口,单片机通过不断地扫描这些信号来获得炮管当前的位置信息和靶标的位置信息。随后,从单片机通过改变输出给驱动模块的PWM信号对云台的水平和竖直方向的角度进行调控[1]。

图1 整体框图
2 方案比较、思路分析和模块选择
2.1 总体思路
本设计目标完成小型电磁炮设计,以STC89C52为控制核心,通过控制自由度云台实现对电磁炮在水平与竖直方向的调整,运用电容的充电和放电使缠绕漆皮线的炮管产生磁场,利用安培力将炮弹发出。通过对超声波传感器和角度传感器的控制,精确寻找靶标。
2.2 电源模块选择
方案一:采用4节1.5V蓄电池放入交流转直流电源中提供直流减速电机的电源,采用此种供电方式后,单片机和传感器工作稳定,且电池的体积较小,能够满足系统的要求。但直流电流放电受到自身影响很大,而且放电时间受限,不能长时间工作[2]。
方案二:采用变压器将220V电压变压后,经过整流桥整流,在经过三端稳压器稳压后得到直流电源。但此方案操作复杂,不利于更好的进行测试。
鉴于以上分析,选用方案一。
2.3 显示模块选择
方案一:用数码管进行显示。数码管由于显示速度快,使用简单,显示效果简洁明了而得到了广泛应用。但是由于我们计划在显示模块中显示输入的距离d值以及偏离角度α,用数码管无法显示如此丰富的内容。
方案二:用LCD液晶进行显示。LCD由于其显示清晰,显示内容丰富、清晰,显示信息量大,使用方便,显示快速而得到了广泛的应用。对于此系统我们选用LCD1602能够很好的满足显示要求,因此我们选择了此方案[3]。
鉴于以上分析,选用方案二。
2.4 输入模块选择
方案一:采用独立按键输入。独立按键比较简洁明了,可以做一些简单的操作。
方案二:采用4*4矩阵键盘进行输入。矩阵键盘按键较多可以满足输入较大的输入要求,但扫描复杂,占用I/O口较多。
综合以上,选用方案二。
2.5 超声波传感器选择
因为本设计需要传感器检测最大量程3 m以上距离的数据,查询各种资料,综合红外传感器、光电传感器,发现以上两种传感器的有效测量距离均较短。而超声波传感器的距离可以达到所需距离,所以我们选择超声波传感器HC-SR04[4]。
3 系统硬件设计
3.1 电磁炮发射电路模块
发射模块利用安培力做功进行发射。使用单刀双掷开关实现电容的充放电:当开关置于右方与电源相连时,采用6V直流电源,XL6009E1升压模块给并联的两个50V 10 000μF电容充电;当开关置于左方与用300匝漆包线缠绕的炮管相连进行放电时,放电的一瞬间通电的漆包线圈内部产生安培力,对有磁性的弹丸做功,使弹丸快速发射[5]。

图2 电磁炮发射电路

图3 升压模块原理图
3.2 云台模块
采用2个舵机通过组装制作一个2自由度云台。舵机采用MG996型号舵机(图4)。通过采用PWM算法中,改变占空比和单片机中定时器0的初值来改变舵机的转动角度。两个舵机的褐色线、橙色线和黄色线分别接地、接电源以及连接单片机的P2.0和P2.3口。
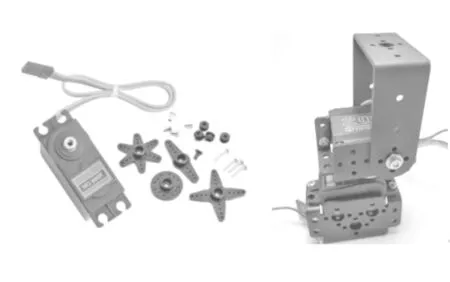
图4 舵机及云台
3.3 整体硬件
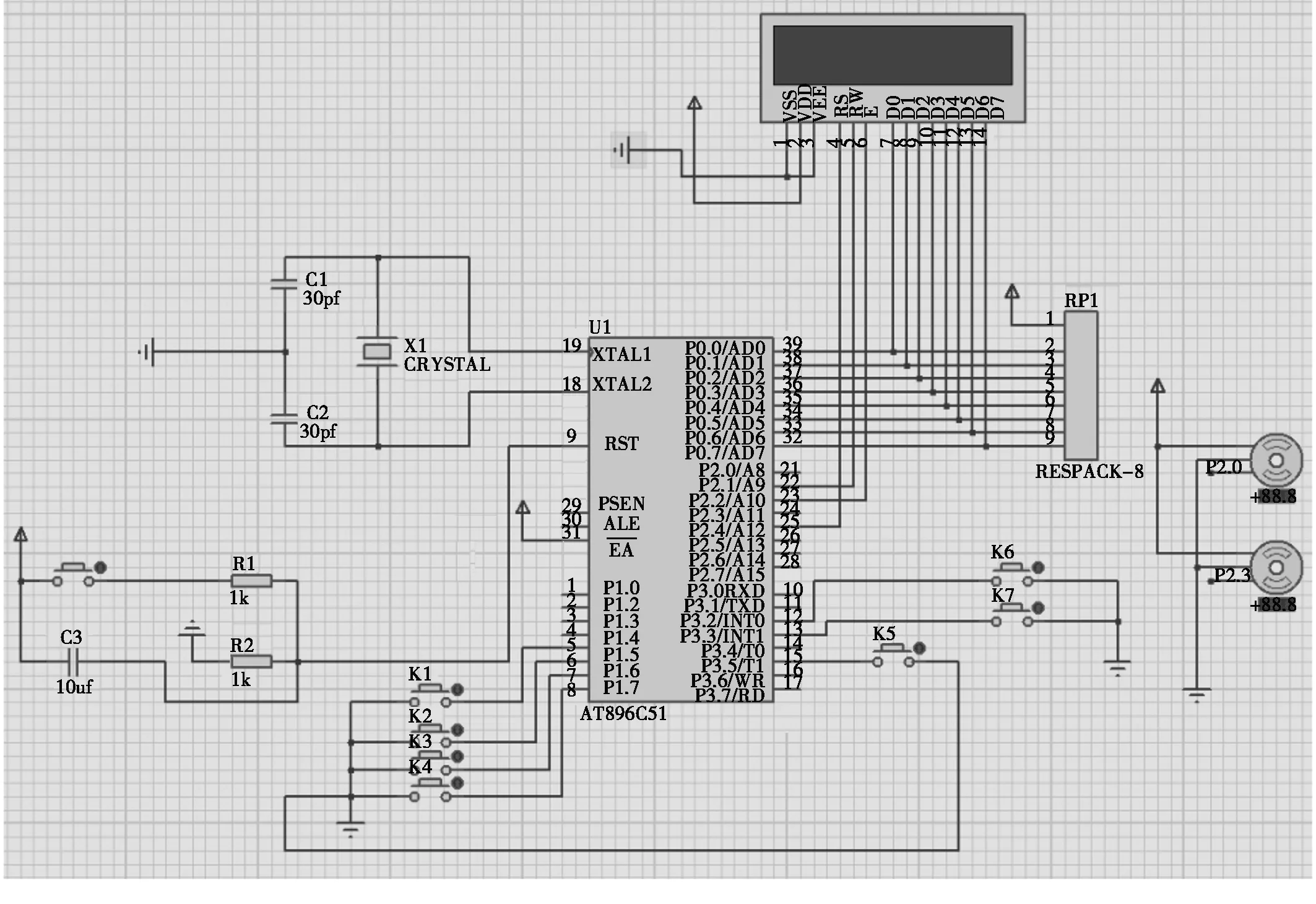
图5 整体电路
4 系统软件设计
云台控制编程主要采用C51语言来编译程序,图6是电磁炮的主要程序流程图。
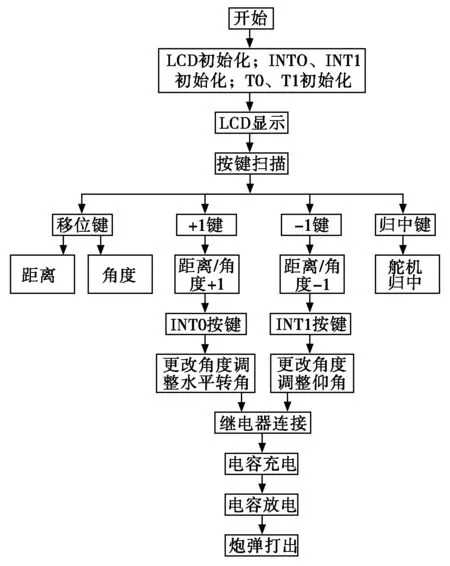
图6 核心程序流程
5 测试方案与测试结果
5.1 测试仪器
4m量程的皮尺、环形靶、靶标、电磁炮、量角器。
5.2 测试方法
通过改变不同电容、仰角、弹丸重量,来观察弹丸发射的距离;输入的发射角度和实际角度的偏差。
5.3 测试结果
表1为电容为10 000μf;仰角为30°时,弹丸重量大小对射程的影响,可见弹丸重量与射程基本成反比,重量越大射程越小。

表1 弹丸重量对射程影响
表2为弹丸重量为10g;仰角为30时,电容大小对射程的影响,电容越小射程越小。

表2 电容大小对射程的影响
表3为电容为10 000μf;弹丸重量为10g时,仰角大小对射程的影响,在一定范围内,仰角越大射程越远。

表3 仰角大小对射程的影响
表4为舵机输入角度和理论角度及实际角度的偏差,输入角度、计算的理论角度与实际角度有1°~4°的偏差。

表4 输入角度与实际角度的偏差
6 问题分析与总结
问题分析:因为算法和舵机等因素,输入角度、理论角度和云台实际旋转角度存在偏差。接线处的不稳定及电容等因素,每次射击角度存在偏差。
总结:从测试结果来看,该电磁炮设计实现了题目基本部分的要求,PWM技术能够极大地提高云台的驱动效率,通过传感器接收模块解决了电磁炮自动瞄准的问题,而传感器也能够精确测量炮台与靶标之间的距离。从运行情况看,采用本系统设计制作的模拟曲射电磁炮,系统可靠性较高,运行较为稳定,达到了设计要求;但是云台的控制功能还需要进一步完善,能够将使得系统更趋于智能化、人性化的特点。
