复杂低空飞行安全态势评估指标研究*
2019-12-27黄晶晶张洪海祝前进邹依原
黄晶晶 张洪海* 祝前进 邹依原
(南京航空航天大学民航学院1) 南京 211106) (中国人民解放军32145部队飞行管制室2) 新乡 453000)
0 引 言
随着我国经济的快速发展,对低空空域资源及通航的需求越来越大.对复杂低空飞行安全态势进行评估不仅能科学监控复杂低空混合飞行,促进通用航空安全运行管理,还能在低空需求日趋旺盛的未来确保低空资源的充分利用.而对复杂低空飞行安全态势进行评估则需要建立相应的关键指标,国内外学者对此有众多研究.在低空通航领域,张洪海等[1-4]提出了代表航空器发生冲突的次数的“冲突数”,代表进行冲突避让行为的航空器数量比以衡量该类航空器群体飞行活动所受影响程度的“冲突避让行为比”,代表冲突解脱持续时间均值的“飞行冲突平均持续时间”,代表航空器间危险迫近程度的“汇聚迫近程度”和“碰撞风险强度”以及同解脱行为相关的“调高度/速度/航向数”、“平均高度/航向/速度改变量”等指标对复杂低空飞行态势进行了特性分析.在公共运输航空领域,更多的是与空中交通拥堵、复杂性及飞行事故相关的评估指标,Klein等[5-6]为支持扇区动态划分提出了七个简化的动态密度指标,如“航空器密度”“速度变化”“高度变化”等.张晨[7]将代表同高度航空器间间隔均值以衡量航空器的分布情况及密集程度的“平均间隔”,代表不同航空器混合比的“交通混合程度”等指标用于研究空中交通行为复杂性.蒋京芩等[8]提出了区分点线体的“飞行密度”指标,用于评价终端区进场交通流空中交通拥挤状态.Gano[9]提出了针对某时刻扇区内所有不重复的水平间距小于标准值的航空器对安全性的“碰撞风险指数”等指标用于评估管制员的负荷.在道路交通领域,项乔君等[10]提出了小时冲突数与小时交通量比值的“时均冲突率”指标评价了交叉口交通安全状况.侯琳等[11]提出了“拥堵扩散/消散时间”两个时间指标和“最大拥堵半径”、“最大排队长度”两个空间指标分别从时间和空间上反映交通事件对交通造成的影响.由此可知,上述研究综述提到的评估指标虽然可以作为复杂低空飞行安全态势评估指标来源参考,但这些研究未对指标的重要程度和重复性进行判断,低空飞行态势评估指标较为混杂不成体系,存在信息冗余.因此,还需要对评估指标进行筛选.
国内外对于指标筛选主要采用定性分析或是定量分析的方法,赵桂红等[12]通过德尔菲法对机场停机坪安全指标进行筛选;石宝峰等[13]通过R型聚类和变异系数法构建了绿色产业指标筛选模型;王芳荣等[14]基于灰色粗糙集理论对次任务安全评价指标进行了筛选.这些研究主要存在的问题是考虑均较为单一,单从定性层面筛选指标主观性太大;对于比较新的研究课题而言,单从定量方法上筛选指标则过于依赖数据,忽略了指标内涵和研究背景[15].
针对上述问题,文中基于现有低空飞行态势评估指标,借鉴其他领域的研究,建立复杂低空飞行安全态势评估指标体系,从主客观相结合的角度出发,利用变异系数-重要程度-相关系数筛选复杂低空飞行安全态势评估关键指标,通过仿真实验对关键指标进行验证分析.
1 复杂低空飞行安全态势评估关键指标筛选原理
1.1 指标筛选原则
1) 信息含量最大原则 指标的信息含量反映了指标数据差异对复杂低空飞行安全态势评估的鉴别能力,信息含量越大表明该指标对安全态势评估的鉴别能力越强.
2) 冗余信息最小原则 指标间的相关性越大,所含信息重叠程度越高,而过多的冗余信息会使评估结果反映的信息混乱,因此指标间应有所区分.
3) 有效性原则 筛选所得指标不超过原始指标的30%,所含信息应至少占原始指标信息的95%以上.
4) 普适性原则 每个指标数值虽不同,但其数据走向若均具有明显的规律性,则可以称其具有普适性.筛选后的指标应适用于绝大多数的场景,不随仿真参数的变化发生较大的波动,具有一定的稳定性和规律性.
1.2 指标筛选原理
文中基于指标筛选原则,依据复杂低空飞行安全态势运行特性从冲突风险和解脱行为两个层面将复杂低空飞行安全态势评估指标分为两大类,根据现有文献综述进行整理和完善,得到复杂低空飞行安全态势评估关键指标筛选原理,见图1.
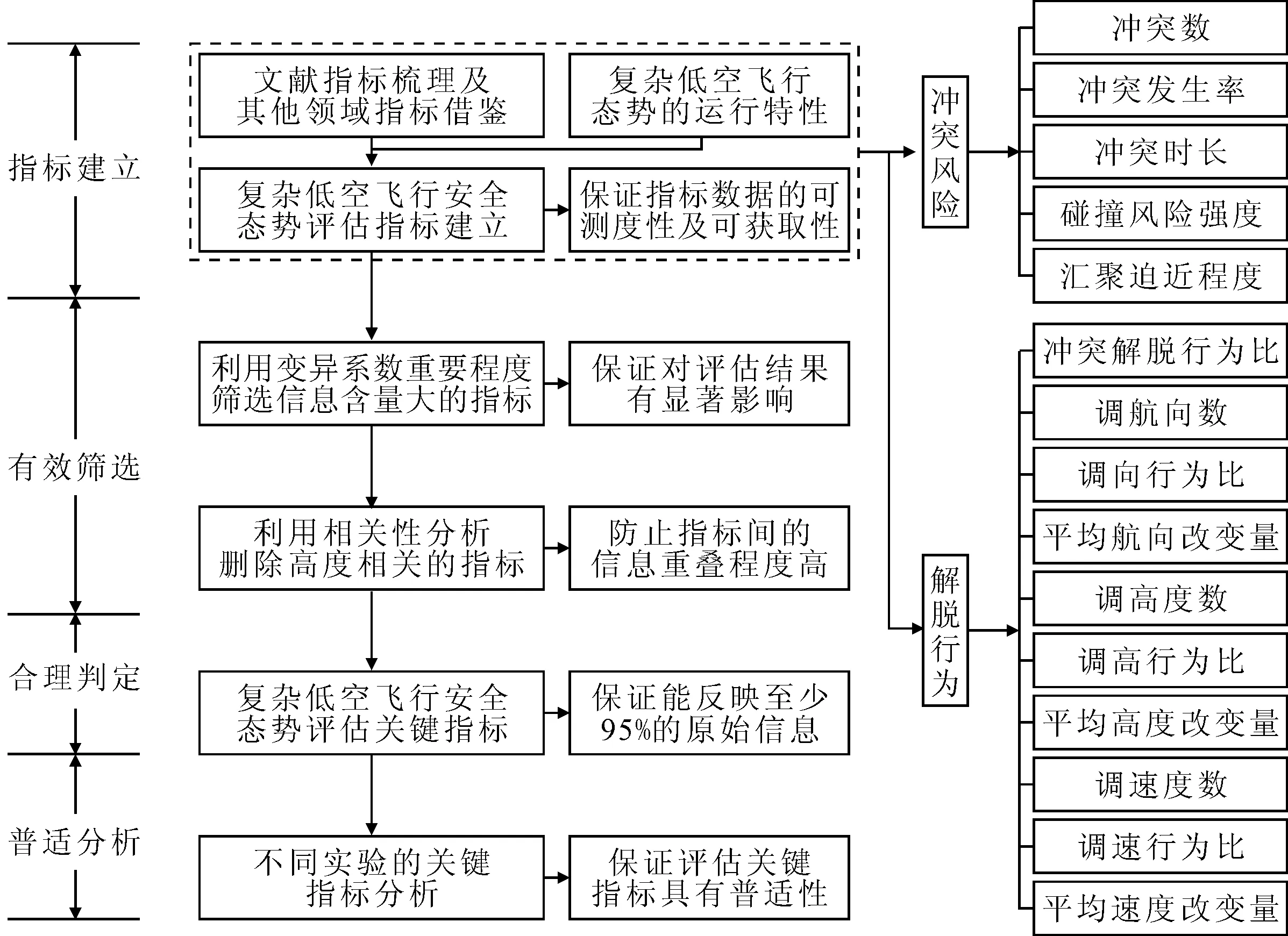
图1 复杂低空飞行安全态势评估关键指标筛选原理
2 复杂低空飞行安全态势评估关键指标筛选模型
2.1 复杂低空飞行安全态势评估指标计算
1) 冲突数 某时段特定低空空域内通用航空器发生飞行冲突的总次数,反映低空空域的整体冲突状态,表示为
(1)
式中:n为统计时段内的飞行量;t0~t1为统计时段;conflicti,t0~t1为通用航空器i在时段t0~t1发生的飞行冲突次数,若通用航空器i在时刻t∈[t0,t1]存在飞行冲突则conflicti,t=1,否则conflicti,t=0.
2) 冲突发生率 同时考虑冲突数和飞行量的影响,表示为
(2)
3) 冲突时长 某时段特定低空空域内所有通用航空器从探测到冲突至冲突解脱所用的时间,用以衡量冲突强度,表市为
(3)
式中:timei,t0~t1为通用航空器在时段的冲突解脱时间.
4) 碰撞风险强度 基于人工势场法的通用航空器之间或者通用航空器与障碍物之间的斥力大小即危险贴近程度,表示为
式中:η为正比例位置增益系数;Di(t)为通用航空器i在时刻t与最近的航空器或障碍物之间的距离;Rs为通用航空器i的最小水平安全间隔要求.
5) 汇聚迫近程度 某时段特定低空空域内通用航空器i与通用航空器j或与障碍物之间的距相撞剩余时间的倒数,用来反映通用航空器汇聚的紧迫程度,表示为
(5)
设通用航空器位置和速度矢量为P和V,则任意两架通用航空器i和j的相对位置和相对速度可以表示为Dij=Pi-Pj,Vij=Vi-Vj.当(Dij,Vij)>0时,通用航空器间呈汇聚态势.
6) 冲突解脱行为比 某时段特定空域内飞行冲突解脱行为次数与飞行量的比值,值越小说明解脱越容易,表示为
CRt0~t1=
(6)
式中:headingi,t,altitudei,t,velocityi,t分别为通用航空器i在时刻t的调航向、调高度、调速度次数.若进行了调航向、调高度、调速度行为,则headingi,t=1,altitudei,t=1,velocityi,t=1否则均为0.
7) 调航向数 某时段特定低空空域内通用航空器发生调航向行为的总次数,表示为
(7)
8) 调向行为比 某时段特定低空空域内通用航空器发生调航向行为的总次数与冲突数的比值,表示为
(8)
9) 平均航向改变量 某时段特定低空空域内所有调航向航空器的航向改变量的平均值,反映航空器冲突解脱的难度,表示为
(9)

10) 调高度数 某时段特定低空空域内通用航空器发生调高度行为的总次数,表示为
(10)
11) 调高行为比 某时段特定低空空域内通用航空器发生调高度行为的总次数与冲突数的比值,表示为
(11)
12) 平均高度改变量 某时段特定低空空域内所有调高度航空器的高度改变量的平均值,反映航空器冲突解脱的难度,表示为
(12)
13) 调速度数 某时段特定低空空域内通用航空器发生调速度行为的总次数,表示为
(13)
14) 调速行为比 某时段特定低空空域内通用航空器发生调速度行为的总次数与冲突数的比值,表示为
(14)
15) 平均速度改变量 某时段特定低空空域内所有调速航空器的速度改变量的平均值,反映航空器冲突解脱的难度,表示为
(15)

2.2 关键评估指标筛选模型的建立
步骤1数据获取及处理 设计多个不同仿真场景并进行多次实验,获取原始数据,通过MATLAB计算各个指标值.为消除不同指标量纲和数量级影响的同时保留各指标原始变异程度信息,保证数据的可比性问题采用均值化法对数据进行标准化处理为
(16)

步骤2指标重要程度打分 通过专家讨论会,请5个专家按照“非常重要、重要、一般、较不重要、不重要”对应“5,4,3,2,1”对各个指标的重要程度进行打分,去掉一个最高分,一个最低分,取平均值作为各指标最后的重要程度分值.本文各指标重要程度打分结果见表1.
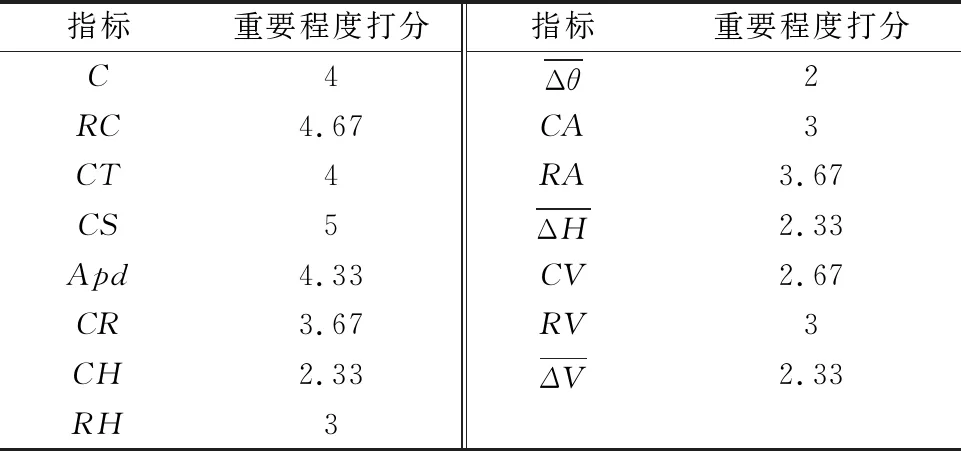
表1 指标重要程度分值
步骤3变异系数-重要程度筛选 通常使用变异系数来判断某个指标的差异程度,差异程度越大,差异信息越显著,对评估结果影响越大.为防止因差异系数极差过大而误删部分重要指标,避免定量分析对指标内涵的完全忽视,还需结合指标的重要程度进行定性分析判断.
通过式(17)计算指标的变异系数,由于数据集中难免有个别极端数据,但这些极端值一般不会引起中位数的变化,因此,以变异系数均值和重要程度中位数作为参考线,绘制变异系数-重要程度四分图,删除低变异系数-低重要程度象限的指标.
(17)

步骤4相关性筛选 根据皮尔逊相关系数式(18)计算指标间的相关性,并对同一类指标进行相关性的统计检验.查皮尔逊积差相关性临界值表可知置信水平为0.01的双尾检验的临界值,在数轴上临界值和绝对相关值1之间将其平均分为前、中、后三段,分别称为相关、中度相关、高度相关区域,据此,对同一类指标中高度相关的指标进行筛选取舍,之后再对类间指标进行相关性分析筛选最终指标.
(18)
式中:rij为i个指标和第j个指标的相关系数;yik为第k个评价对象第i个指标标准化后的值(k=1,2,…,n).
步骤5普适性分析 将各个实验筛选得到的指标进行横向对比,筛选保留共同的稳定性较高的指标作为复杂低空飞行安全态势评估关键指标.
步骤6合理性判定 设S为指标数据的协方差矩阵;trS为协方差矩阵的迹,表示协方差矩阵的主对角线上各指标的方差之和;m为经过筛选之后的指标个数;n为原始指标的个数,则筛选后的指标对初选指标的信息贡献In即筛选后的m个指标能够反映n个原始指标的信息为
(19)
3 仿真实验验证
3.1 实验设计
以美国洛杉矶城市信息为依据,基于复杂低空飞行态势仿真系统设计三类复杂低空繁忙空域环境,仿真区域面积为70 km×50 km,以300 m为垂直间隔单位将低空空域划分为10个高度层.图2a)为场景A,包括一个管制机场和相应的终端区,直径为40 km,两个通航机场和相应的报告空域,直径为10 km,一个农林作业点,两个抢险救援点,一条观光旅游航线;图2b)为场景B,在场景A的基础上修改了通航活动任务混合比及其对应的航线;在图2a)场景A的基础上增加了固定障碍物和雷暴天气的随机影响作为场景C.假设:航空器的最小安全间隔要求为1 km,冲突探测距离为5 km.通过设置不同的参数和场景设计6组实验,见表2,每组实验仿真40次,每次仿真2 200 tick,其中tick为仿真平台时间单位,1 tick=3 min,表3为通用航空器参数.
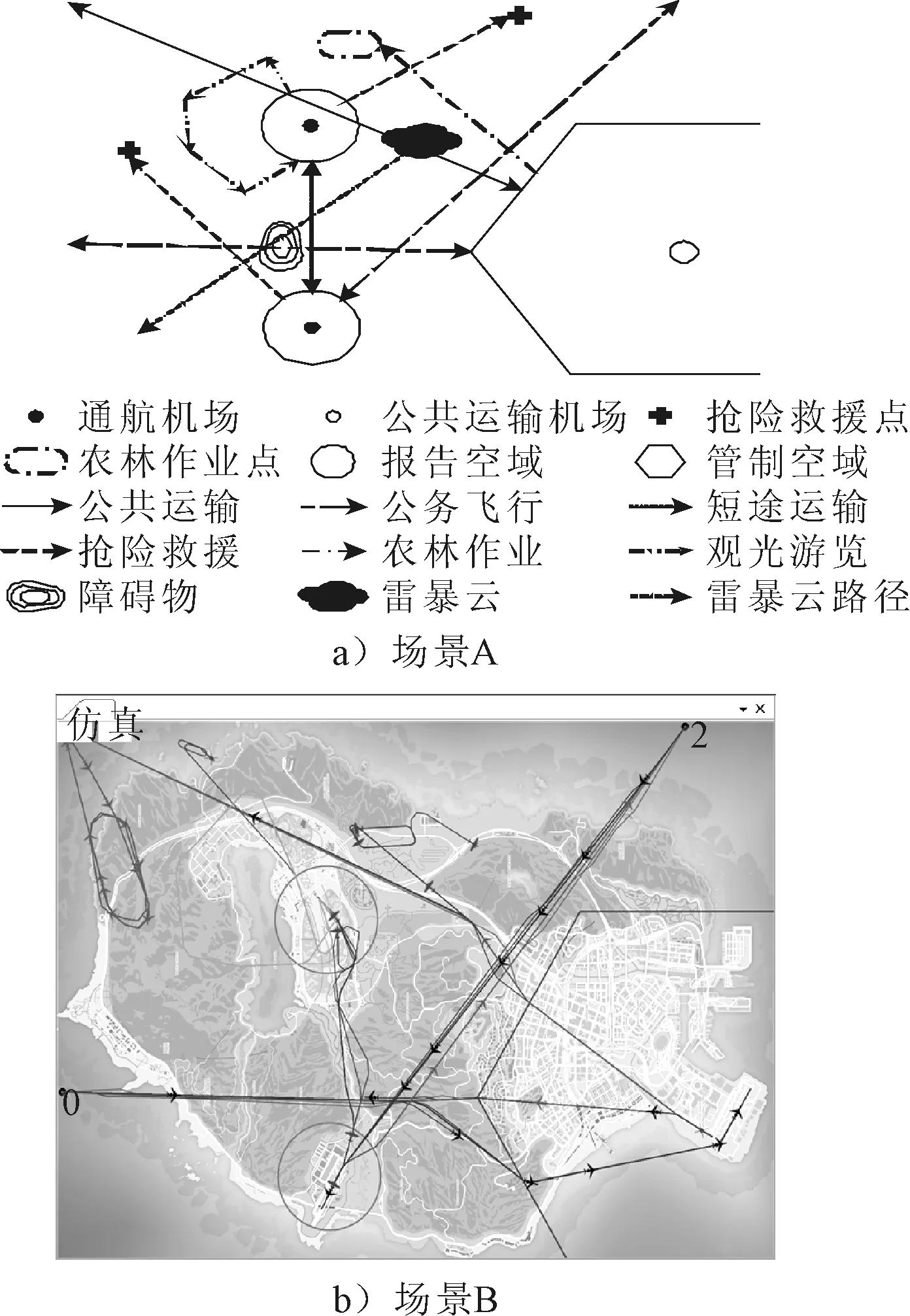
图2 仿真实验场景
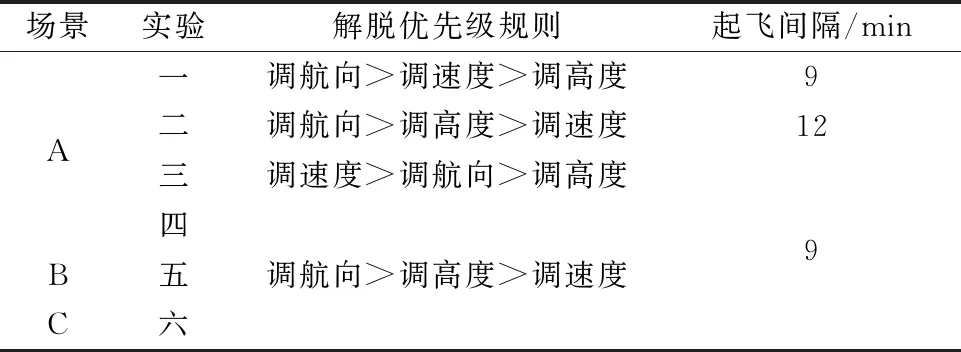
表2 仿真实验参数设置
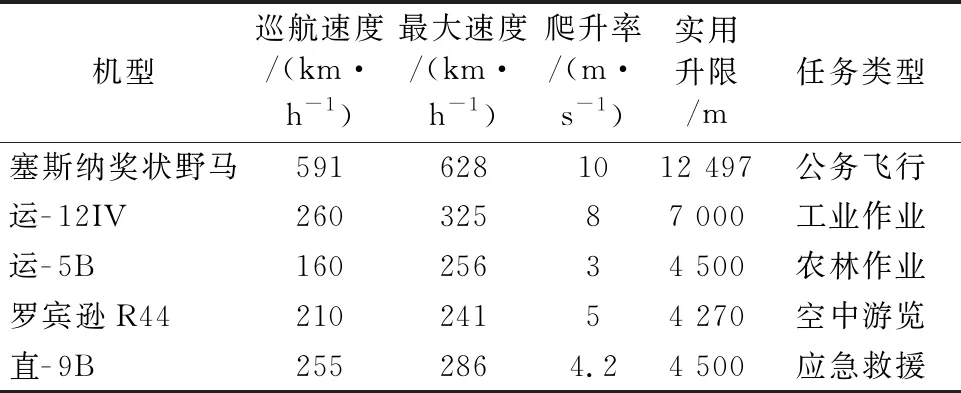
表3 通用航空器参数
3.2 结果分析
以实验一为例,基于“变异系数-重要程度-相关系数”对指标数据进行筛选.
通过SPSS绘制变异系数-重要程度四分图(见图3),剔除落在第三象限即低重要程度-低变异系数(包含中位数参考线)上的指标,剩余以下10个指标:冲突数、冲突发生率、冲突时长、碰撞风险强度、汇聚迫近程度、冲突解脱行为比、调高行为比、调速度数、调速行为比、平均速度改变量.
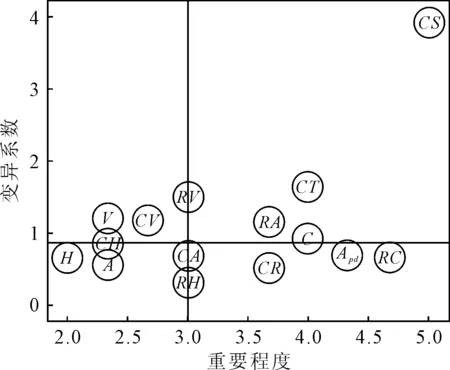
图3 变异系数-重要程度四分图
通过式(18)计算person相关系数即r值,见表4~5,因实验一样本容量为76,查person积差相关性临界值表可知当置信水平为0.01时的双尾检验临界值为0.290,故当两个指标的r值落在高度相关区间[0.763,1]内时应删去其中一个.
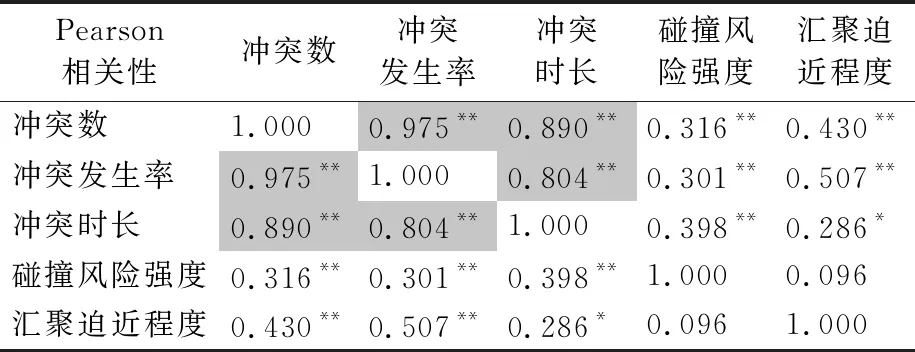
表4 实验一冲突风险类指标间person相关系数
注:**在0.01水平(双侧)上显著相关;*在0.05水平(双侧)上显著相关;阴影为高度相关.
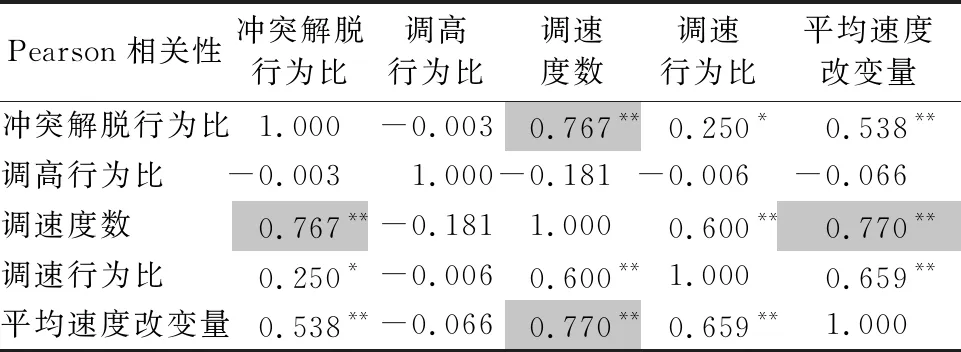
表5 实验一解脱行为类指标间person相关系数
注:**在0.01水平(双侧)上显著相关;*在0.05水平(双侧)上显著相关;阴影为高度相关.
由表4可知,冲突数和冲突发生率及冲突时长的相关系数分别为0.975和0.890,冲突发生率和冲突时长的相关系数为0.804,均呈现高度相关,考虑冲突发生率的意义比冲突数好,冲突时长具有滞后性不适用于实时评估,因此,冲突风险类指标保留冲突发生率、碰撞风险强度、汇聚迫近程度3个指标;解脱行为类指标中,调速度数和平均速度改变量、冲突解脱行为比的相关系数分别为0.770和0.767,呈高度相关,而由图3可知,调速度数信息含量比平均速度改变量、冲突解脱行为比大,因此保留调速度数、调速行为比、调高行为比3个指标.
对暂时保留的6个指标进行类间相关性分析,见图4.由图4可知,冲突发生率和调速度数的相关性大于0.763,呈高度相关,考虑指标的意义,选择保留冲突发生率指标.
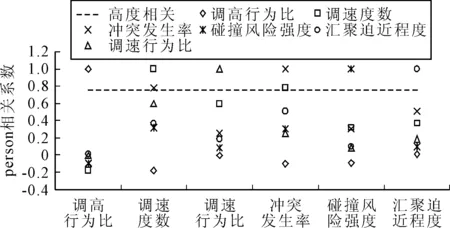
图4 类间各指标person相关系数
因此,实验一筛选得到的指标为冲突发生率、碰撞风险强度、汇聚迫近程度、调高行为比、调速行为比5个指标.同理可得到其余实验的指标筛选结果见表5.
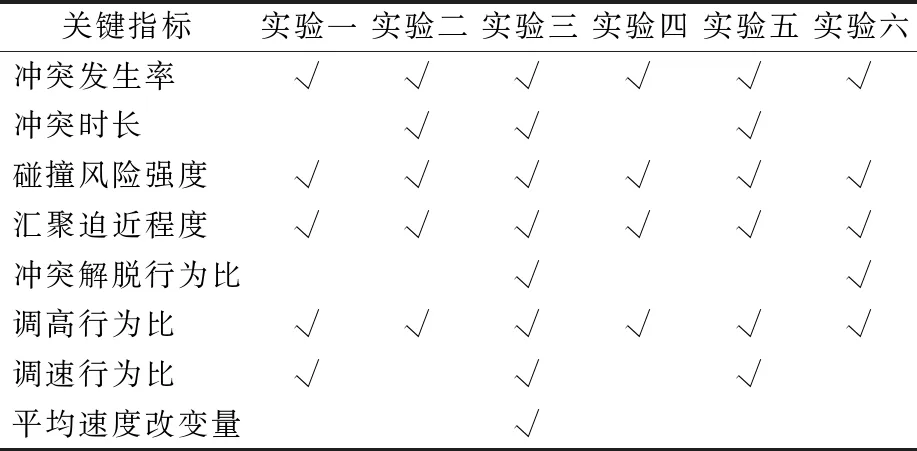
表5 各实验关键指标筛选结果
3.3 普适性分析
在3.2筛选结果的基础上分析出现3次及以上指标在各个实验中呈现的特性,见图5.
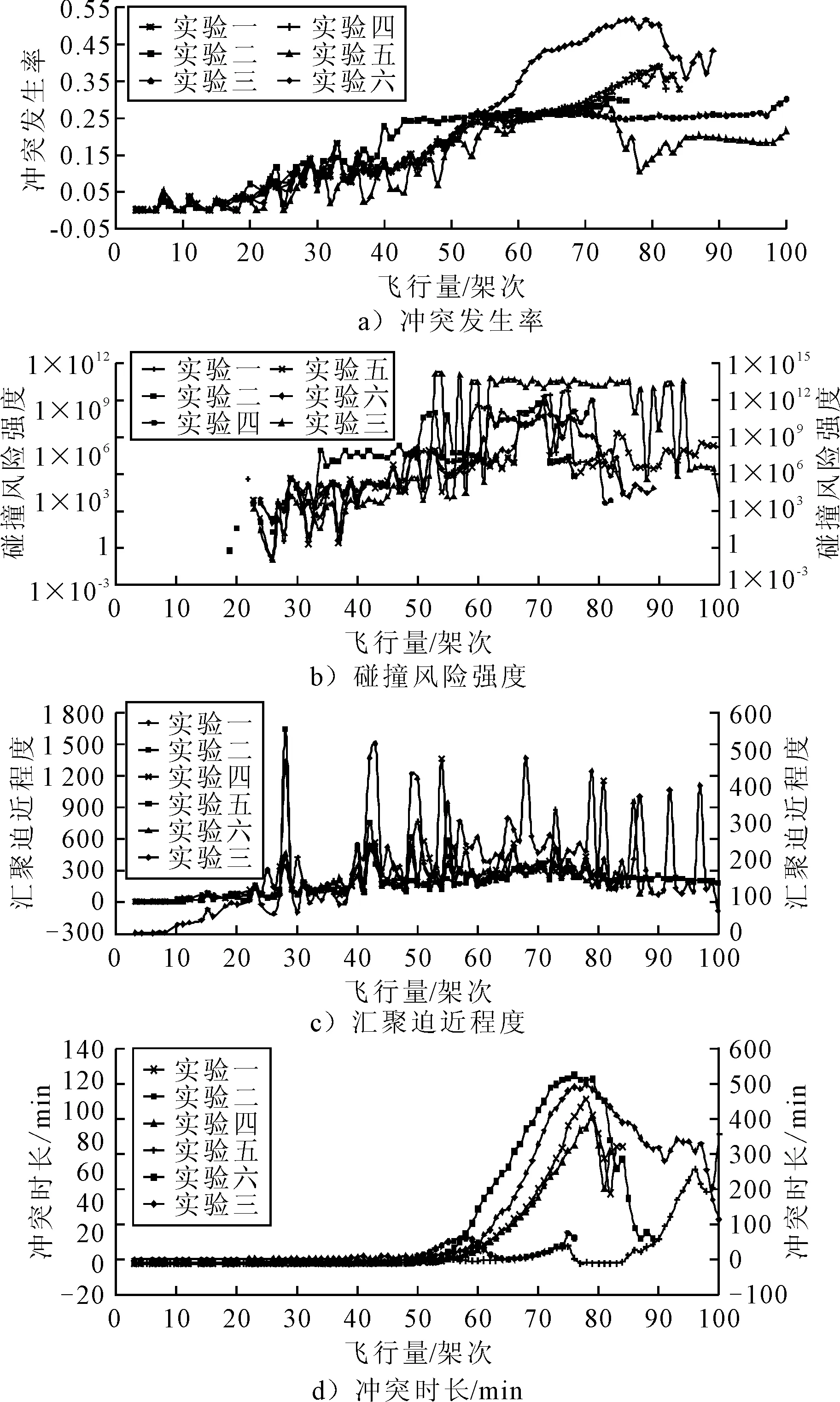
图5 冲突风险类指标稳定性图
由图5a)可知,实验一至六的冲突发生率随飞行量的增加,其变化趋势较为一致.随着飞行量的增长,冲突发生率一直处于波动上升的趋势,说明冲突数增长的速度越来越快,当飞行量为55~70架次时,冲突发生率均趋于一个稳定值,说明此时冲突数在以一个稳定的速度增长,在75架次之后,不论冲突数还是冲突发生率都出现了混乱的走向,这是由于仿真平台已经达到其承受的仿真能力,因此之后的数据不建议考虑.
由图5b)~d)各指标的稳定性上看,各个实验的汇聚迫近程度异常值较多且出现时机相隔甚远,波动趋势杂乱无章;在冲突时长被作为筛选后的指标保留的实验二、三、五中,该指标在50架次之后表现混乱,毫无规律可言,反观各个实验的碰撞风险强度指标随着飞行量的变化趋势在不同实验场景下较为一致,由图5b)可知随着飞行量的增加,碰撞风险强度出现波动式上升,在40~45架次时保持稳定,说明该飞行量对应的低空空域飞行安全态势较为安全稳定,在飞行量为52~75架次时出现了较大起伏的波动,说明此时空域飞行安全态势不够稳定,容易发生危险.因此冲突风险类指标中采用冲突发生率和碰撞风险强度作为关键评估指标.
图6为解脱行为类指标稳定性图,由图6可知,当飞行量在26架次时,实验一至六的调高行为比均突增,说明26架次的飞行量有可能是空域安全态势变化的一个转折点;飞行量为55~70架次时,实验一至六调高行为比趋于稳定,说明此时空域趋于饱和,70架次之后的调高行为比均出现波动,说明此时空域有可能已超出了承载能力,飞行安全态势不容乐观.从指标的稳定性而言,调高行为比指标随着飞行量的变化趋势不随实验场景参数规则的调整而发生较大波动,而调速行为比的数据走向毫无规律可循,因此解脱行为类指标中采用调高行为比作为关键评估指标.
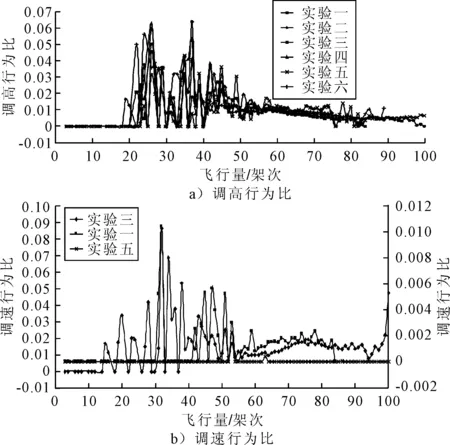
图6 解脱行为类指标稳定性图
3.4 合理性判定
由上述分析可知六个实验经过有效性筛选和普适性验证最终得到三个关键指标:冲突发生率、碰撞风险强度、调高行为比.通过式(19)分别对这三个指标在各实验中的合理性进行判定得到各个实验的信息贡献值均达到99%.鉴于此,筛选得到的三个关键指标占原始指标的20%,均反映各实验原始指标95%以上的信息,证明该筛选模型筛选出的关键指标是合理的.
综上,复杂低空飞行安全态势评估关键指标为冲突发生率、碰撞风险强度、调高行为比.
4 结 论
1) 文中借鉴各领域关于态势安全评估指标的定义,结合复杂低空飞行态势运行特性,从冲突风险和解脱行为两个维度给出了复杂低空飞行安全态势评估指标体系.
2) 采用主客观相结合的方法构建了关键指标筛选模型,通过变异系数-重要程度四分图筛选对评估结果影响弱的指标,克服了指标因变异系数极差过大而被删除的问题,既避免了定量分析过于依赖数据而完全忽视指标内涵,又降低了主观判断出错的可能性,同时保证了被保留下来的关键指标对评估结果具有显著的影响;通过相关性分析保证了指标间信息的不重叠性,避免因信息冗余导致评估结果准确度的损失,相关性分析仅在指标的两两之间作出选择,高度相关的指标之间互有替代性,因此,评估结果不会有太大的偏差.
3) 通过设置不同的实验场景,对筛选的指标进行稳定性和规律性分析,最终得到了冲突发生率、碰撞风险强度、调高行为比三个复杂低空飞行安全态势评估关键指标,保证了用20%的指标反映了99%的原始信息,验证了文中提出的筛选模型是高效且合理的.
