车载组合式惯导测试系统的设计*
2019-12-27郭一鸣夏金玲赵智杰班亚弼
郭一鸣,夏金玲,赵智杰,班亚弼
车载组合式惯导测试系统的设计*
郭一鸣,夏金玲,赵智杰,班亚弼
(辽宁工业大学汽车与交通工程学院,辽宁 锦州 121001)
文章组建了组合式惯导实际的测试系统,采用MATLAB软件验证的EKF控制算法的有效性,通过传感器实测车辆运行数据输入以嵌入式C语言编写EKF的算法程序,通过STM32单片机运行EKF算法进行实际的车辆运行状态参数的准确输出,理论与实际结合完成了测试系统设计,保证了动态测试的准确性,实车运动参数可以为后期电控系统的控制提供更加精确的数据。因此,具有很好的推广价值。
组合式惯导;嵌入式C语言;EKF;STM32单片机;状态参数
前言
无论是GPS、惯导系统均存在各自的优缺点,单独任何一种传感器系统不能非常好的满足实际使用需求,比如当汽车行驶在城市高楼区、林荫道时,GPS卫星信号经常受到遮挡,即“盲区”的现象[1-2],此时不能通过GPS系统实现连续准确的定位;而惯导系统单独使用其误差随时间积累而发散。如果通过两者组合具有很好互补性,通过EKF滤波可实现测试系统系统的精度和稳定性。因此,本文采用单片机智能控制系统,通过嵌入式C语言设计算法程序编写EKF滤波算法,通过姿态传感器、磁场传感器和GPS组合进行了车辆运动状态参数的实时测量,进行实际数据的测算。
1 测试系统硬件组成
该系统以意法半导体集团生产的STM32为主控制器[3],通过各类传感器来釆集各类信息,送入主控单元融合并处理数据后将各个传感器信息以及精确地理坐标显示在LCD 12864液晶上,以达到导航作用。地理坐标采集电路采用ATK1218-BD(GPS+BD)模块,磁场强度检测采用HMC5883L磁场传感器完成,车辆的姿态获取由MPU9250九传感器实现。最后由STM32控制单元处理数据,通过程序有序合理的将各模块信号融合在一起并完成相应动作,同时将数据显示在LCD12864液晶屏上方便实验观察。系统的总体架构框图如下图1所示:

图1 测试系统的总体架构
2 EKF算法的设计
2.1 EKF卡尔曼的工作原理
EKF卡尔曼滤波是一种递归的估计,即只要获知上一时刻状态的估计值以及当前状态的观测值就可以计算出当前状态的估计值,因此不需要记录观测或者估计的历史信息[4-5]。卡尔曼滤波器与大多数滤波器不同之处,在于它是一种纯粹的时域滤波器,它不需要像低通滤波器等频域滤波器那样,需要在频域设计再转换到时域实现,卡尔曼滤波算法工作过程如图2所示。

图2 EKF卡尔曼滤波算法图解
2.2 MATLAB算法验证
基于卡尔曼滤波算法经过计算推广到汽车的二维坐标系,在汽车的X、Y两轴分别进行独立的位移迭代运算,即可得到汽车的二维速度-位移运动曲线,如图3所示。
1与2曲线分别表示车辆沿地理坐标经度方向与纬度方向的速度-位移曲线(曲线假设该过程的测量噪声较小,测量值较系统模型的预测值更接近真实值),二者经EKF卡尔曼滤波算法迭代过程中产生的卡尔曼系数K(即预测模型与测量值的权重)用3曲线表示,3曲线逐渐上升,说明预测模型进行迭代时其结果权重偏向于测量值,这也恰恰对应了前面假设的测量噪声较小,说明迭代过程正常进行,输入值准确。
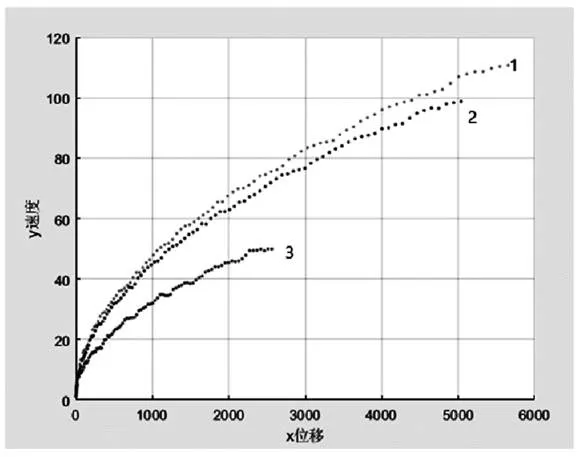
图3 车辆运行的位移-速度曲线
2.3 嵌入式编程实现
本系统软件部分采用嵌入式C语言在Keil uVision4集成开发环境中进行EKF卡尔曼滤波算法的算法的编写,然后编译成.Hex机器码文件,运行于意法半导体集团生产的STM32 F407微处理器,通过液晶显示屏来实现车辆实测车速、横摆角速度、质心侧偏角等实测参数数据,通过实际的测试系统组建完成后可方便进行实车的匹配测试效果。
3 结论
为了有效的解决GPS和MSINS各自缺点问题,进行组合式惯导的研究,应用组合式惯导系统对实际车辆的参数进行有效测量,对于EKF算确性进行了MATLAB仿真验证后,采用嵌入式C语言编译EKF算法程序,通过相关硬件实际测量车辆实际输入的运行参数,得到更为精确的车辆运行相关参数,而这些相关的参数的实时测量输送给控制系统可进行精确的控制保证行车的安全性具有至关重要作用。
[1] 郝亮,李刚,刘树伟. EKF软测量技术在汽车行驶状态估计中的应用[J].中国工程机械学报,2017, 5(15):465-470.
[2] Antonov S, Fehn A, Kugi A. Unscented Kalman filter for vehicle state estimation[J]. International Journal of Vehicle Mechanics and Mobility, 2011, 49(9): 1497-1520.
[3] Gao Y, Feng Y, Xiong L. Vehicle longitudinal velocity estimation with adaptive kalman filter[J]. Lecture Notes in Electrical Engine -ering, 2013, 198:415-423.
[4] 赵治国,杨杰,吴枭威.四驱混合动力轿车分布式卡尔曼车速估计[J].机械工程学报,2015, 16(51):50-56.
[5] 李刚,赵德阳,解瑞春,等.基于改进的Sage-Husa自适应扩展卡尔曼滤波的车辆状态估计[J].汽车工程, 2015, 12(37): 1426-1432.
Vehicle Integrated INS Test System Design
Guo Yiming, Xia Jinling, Zhao Zhijie, Ban Yabi
( Automobile & Traffic Engineering College, Liaoning University of Technology, Liaoning Jinzhou 121001 )
In this paper, the actual test system of the combined inertial navigation system is established. The validity of EKF control algorithm verified by MATLAB software is used. The algorithm program of EKF is written in embedded C language through the input of measured vehicle operation data of sensors. The EKF algorithm is run by STM32 single-chip microcomputer to output the actual vehicle operation state parameters accurately. The design of the test system is completed by combining theory with practice. The accuracy of the dynamic test is verified. The real vehicle motion parameters can provide more accurate data for the later control of the electronic control system. Therefore, it has a good promotion value.
Integrated INS; Embedded C language; EKF; STM32 single-chip; State parameters
U467
B
1671-7988(2019)24-65-02
U467
B
1671-7988(2019)24-65-02
10.16638/j.cnki.1671-7988.2019.24.021
郭一鸣,就读于辽宁工业大学汽车与交通工程学院。
2019年辽宁工业大学大学生创新创业项目(201910154040基于EKF的车载组合式惯导测试系统的设计)。
