基于MATLAB/Simulink的无刷直流电机闭环调速研究
2019-12-25
(北京航空航天大学 北京 100191)
一、无刷直流电机数学模型
无刷直流电机是一个非线性系统[1]。为了方便定量分析,需要对其进行简化[2]。因为所采用的无刷直流电机是采用三相星形接法的,采用两两导通的方式,所以定子三相绕组的相电压表示为:
(1)

电磁转矩方程为
(2)
其中,ω为转子角速度。
电机的机械运动方程为
(3)
其中,Te和TL分别为电磁转矩和负载转矩;B为阻尼系数;J为转动惯量。
二、无刷直流电机仿真模型建立
在MATLAB/Simulink中,完成无刷直流电机各部分模块基本参数的设置和仿真参数的设置,各个模块建立完成之后,对这些模块按照系统结构进行有机整合[3],最终得到整个系统的仿真模型。然后运行仿真模型,最后进行结果分析。
(一)电机本体模块。电机模型采用SimPowerSystems工具箱中的永磁同步电机模块,反电动势波形设置为梯形波。
(二)逆变电桥模块。电子开关电路是由6个MOSFET组成的三相逆变桥来实现的,目的是实现电压逆变。逆变电路使用SimPowerSystems中的通用逆变桥模块。
(三)速度调节器模块。速度调节器模块采用常规的PI控制,输入为给定转速与实际转速的偏差,输出为逆变器PWM控制信号。
(四)逻辑换相控制模型。逻辑换相控制包括编码器和触发器[4]。霍尔位置传感器采用120°安装方式,输出信号中高、低电平各占180°,其Simulink模型如图1所示:
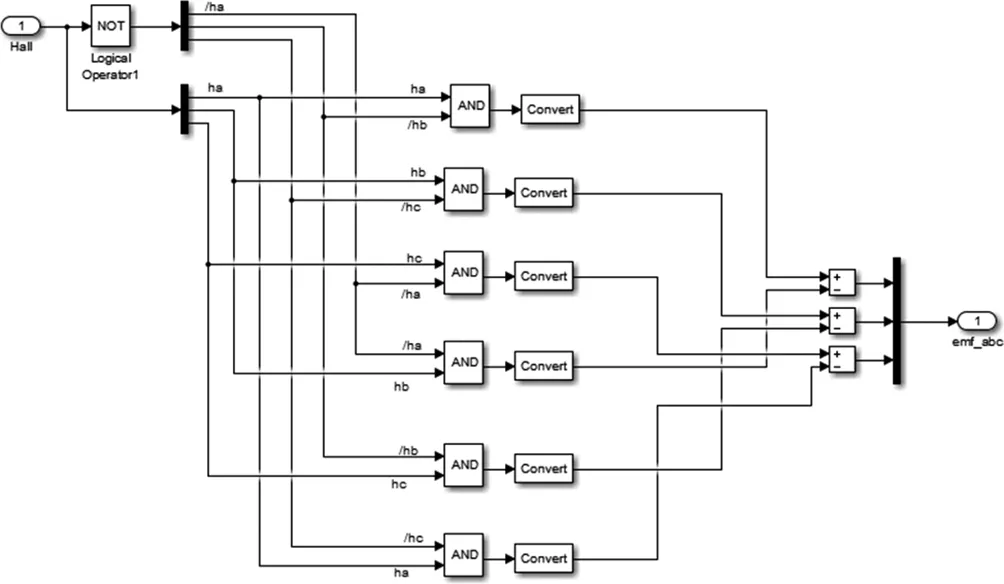
图1 反电动势模型
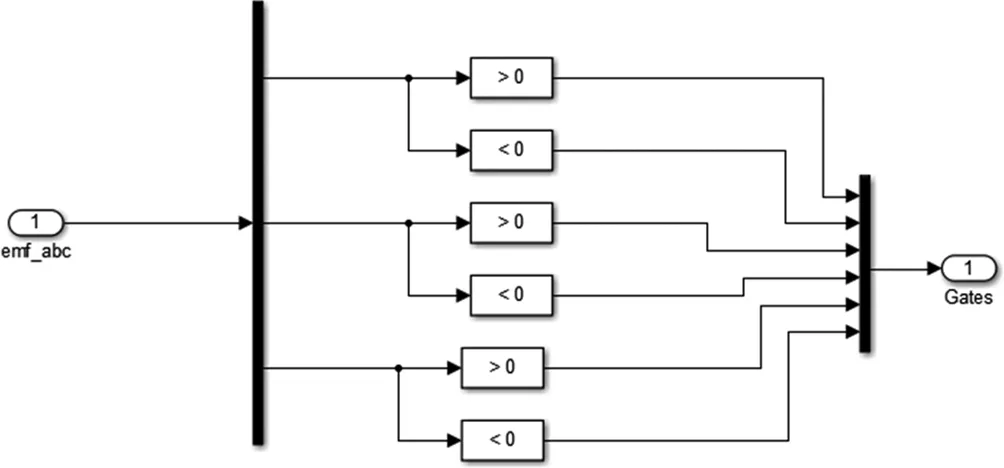
图2 逆变器开关模型
由图1可知,根据电机导通顺序来判断逆变器的工作状态,逆变器开关模型如图2所示。
三、模型仿真结果
整体的无刷直流电机控制模型如图3所示,根据上述建立的模型,对无刷直流电机系统进行仿真。
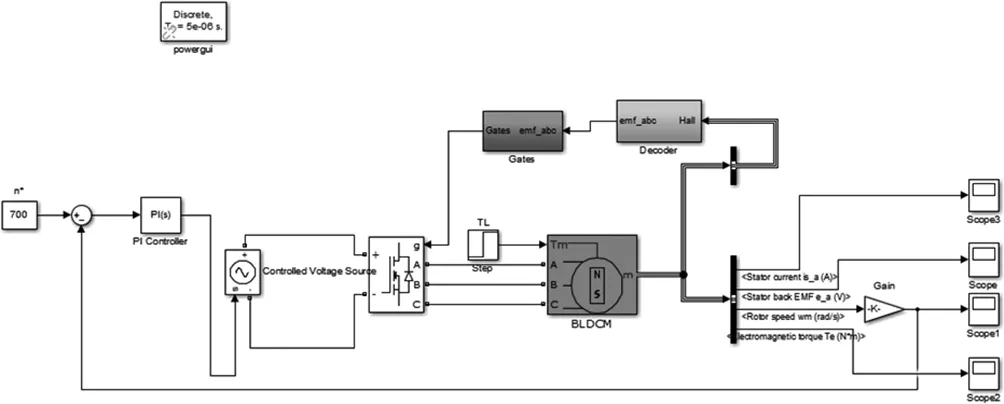
图3 无刷直流电机控制模型
设定工况:给定转速700r/min,在0.1s时给定负载转矩5N·m。对PI参数进行调节,使曲线不出现振荡为止,得到了电机转速曲线如图4所示。
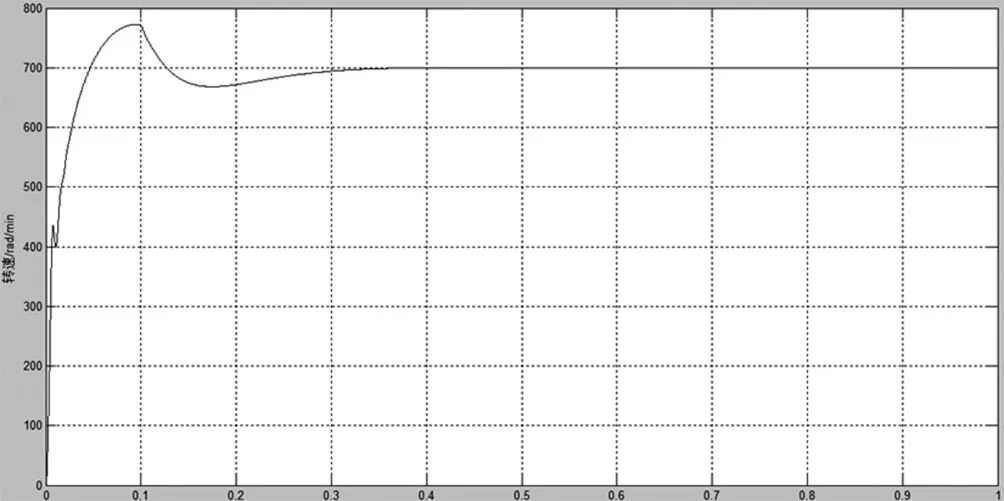
图4 电机转速曲线
从转速曲线图可以看出,转速在很短的时间内达到最大值,在电机达到给定转速前有明显超调,在0.1s突加负载,转速有明显下降,但是0.3s时恢复到给定转速,说明响应比较迅速,抗干扰性强,能够满足电机的性能要求。
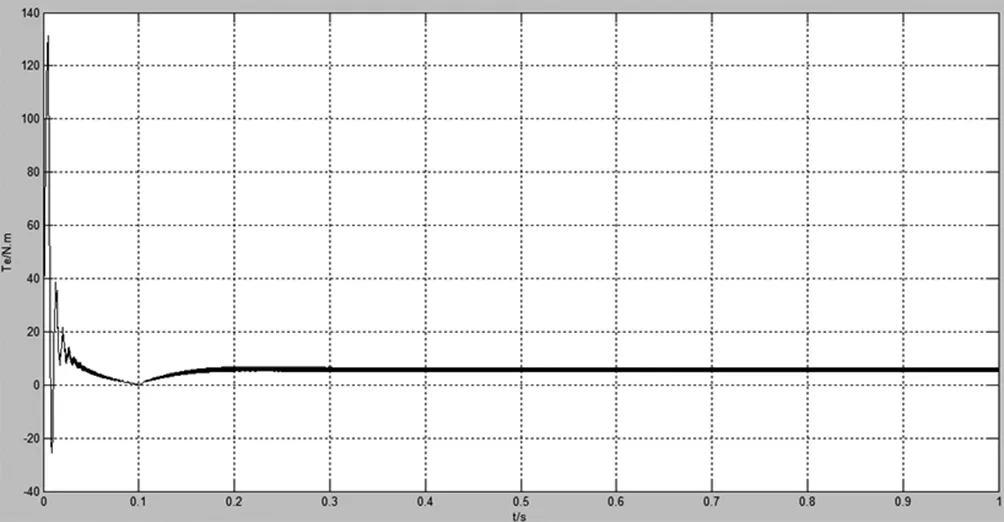
图5 电磁转矩曲线
图5所示为电磁转矩曲线图。由图可知,电机在启动阶段,转矩呈现出较大的峰值,这是由于电机在启动时,启动电流过大,反电动势为零。在0.1s时突加负载,电磁转矩增大,但随着转子的加速,反电动势逐渐增加,电枢电流减小,电磁转矩减小,最后电磁转矩在短时间内趋于平稳。
总结
本文介绍了无刷直流电机的数学模型,然后建立了无刷直流电机的仿真模型,并按照电机参数进行仿真,得到了转速、电磁转矩、定子相电流的输出曲线。仿真结果表明,经过PI控制,转速响应的快速性和稳定性较好,电磁转矩经过启动阶段后趋于稳定,实现了对电机转速的闭环控制,改善了电机的调速性能。
