基于行波原理的10 kV电缆网络分布式故障定位方案
2019-12-25张维进魏洪文张立斌
张维进,魏洪文,张立斌
(1.胜利石油管理局有限公司电力分公司, 山东 东营 257000; 2.山东博鸿电气股份有限公司, 山东 淄博 255049)
电缆线路具有供电可靠性高、安全性好、不占地面空间等优势,在城市10 kV压配电网中应用越来越广泛[1]。但电缆线路发生故障后,现有的配网自动化系统、故障指示器等设备仅能给出故障区段,具体故障位置查找仍需要停电后采用离线式行波测距与定位设备[2-5],不仅花费大量的人力物力,还延缓了故障查找与修复时间。因此,如何快速准确地确定故障点位置是亟待解决的问题。
近年来国内外学者针对如何实现线路故障准确定位做了大量研究。张启亮等[6]根据故障线路中的故障电流和非故障线路中的高频暂态零序电流为非对称信号,实现10 kV电缆小电流系统故障定位。李卫国等[7]提出一种基于离散正交S变换暂态零序电流能量相似度的故障定位方法,判断线路区间两端检测点的能量相似度是否小于设定的阈值故障区间,如果小于阈值即为故障区间。顾晨杰等[8]提出利用不对称故障时的负序电压大小排序进行配电网的光伏电站的故障定位,负序电流由故障点流向外部电网引起的负序电压在各个节点发生变化,找出负序电压最大值即实现故障定位。但是,目前城市电缆网络多为环网柜结构,分支线数量多、故障初始行波衰减严重、折反射规律复杂,利用上述文献所提出的测距方法原理复杂,且在某些情况下对提取的电压、电流信号处理结果并不理想,导致测距失败。
针对上述难题,本文提出了基于行波原理的10 kV电缆网络分布式故障定位方案,即在变电站母线、环网柜母线与主要线路末端分别安装行波测距装置,利用测距装置直接获取故障行波信号时间差进行测距定位。根据该理论研发的装置已在多处现场投入应用,并取得良好效果。
1 行波在环网柜母线及分支线路末端的折反射规律
1.1 行波在环网柜母线上的折反射规律
行波在波阻抗不连续处会发生反射和折射。典型环网柜等值电路如图1所示,一般包括2条进线和n条出线,其中,a、b、1、2,…,n为行波信号检测点,f为故障点。
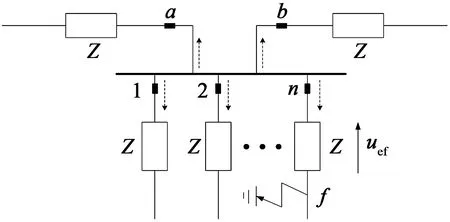
图1 典型环网柜结构及行波信号的折反射
设环网柜所有进线和出线电缆波阻抗均为Z,uef为初始电压行波,电流参考方向均由环网柜母线指向线路,如图1中虚线所示。任何一条线路的电压行波u和电流行波i(i=-u/Z)到达环网柜母线时,经历折反射后,入射线路电压行波ur和所有折射线路的电压行波uz均相同,即
(1)
而入射线路电流行波ir和各条折射线路的电流行波iz则不再相同,
(2)
即任何一对电压行波与电流行波到达环网柜母线时,入射线路电压行波幅值降低、电流行波增大,而所有折射线路电压行波与电流行波将同比例降低。表1给出了典型环网柜中行波的变化情况。

表1 典型环网柜行波折反射情况
然而,在实际10 kV电缆线路中一般存在多个环网柜,如图2所示。忽略线路电阻引起的损耗,行波在传播中的衰减主要是在环网柜母线处的折反射产生的。行波穿越的环网柜个数越多,每个环网柜线路数量越多,则行波衰减越严重。
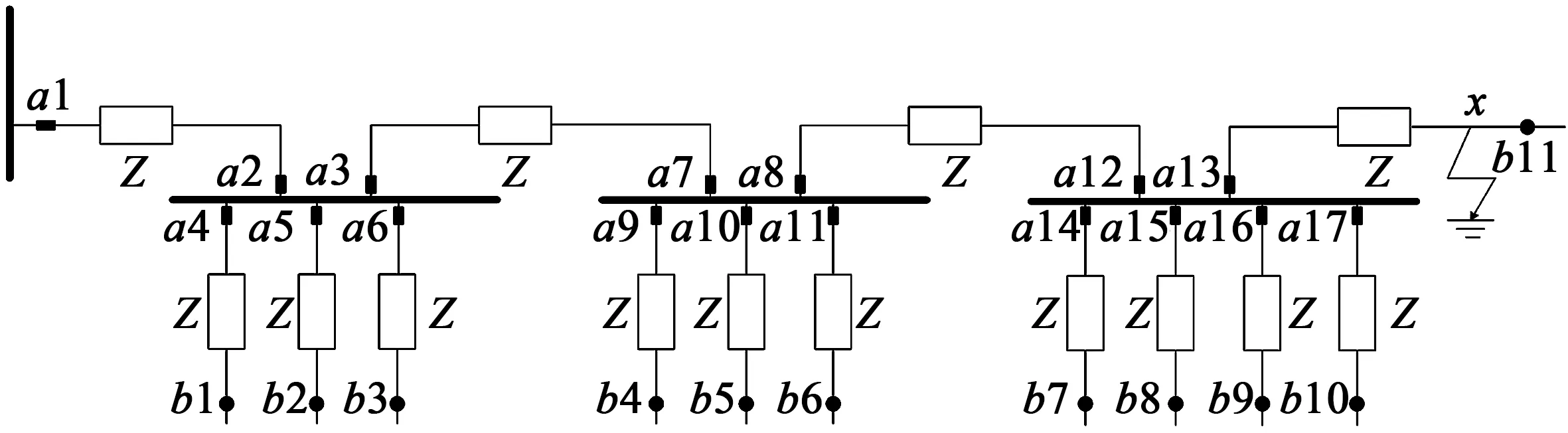
图2 测距装置安装位置示意图
以故障发生在线路最末一个区段(如图2中x点)为例,电压电流行波传播到检测点b7~b10处时(考虑线路末端折反射情况),幅值可以保持在初始幅值的60%以上;传播到检测点b4~b6处时,幅值仅为初始幅值的30%;而传播到检测点b1~b3处时,幅值仅为初始幅值的15%;传播到变电站母线时,考虑到变电站出线数量较多,电流行波尚能保持在初始幅值的10%,而电压行波将衰减到不足初始值的5%。
1.2 行波在线路末端的折反射规律
传统观点认为,零模网络中配电线路末端为开路状态,线模网络中感性负荷(配电变压器)对高频行波信号来讲也可视为开路。即无论是在线模网络还是零模网络的线路末端,电流行波发生负的全反射,总电流行波为0,电压行波发生正的全反射,电压行波加倍。因此,现有配电线路末端行波测距装置一般仅检测电压行波信号。
实际上,配电变压器存在的相间杂散电容将使高频行波在短时间内等效为短路状态,使得线路末端也可以检测到电流行波信号。线路末端等值电路如图3所示,其中,C为变压器等效杂散电容,L为变压器等效电感。
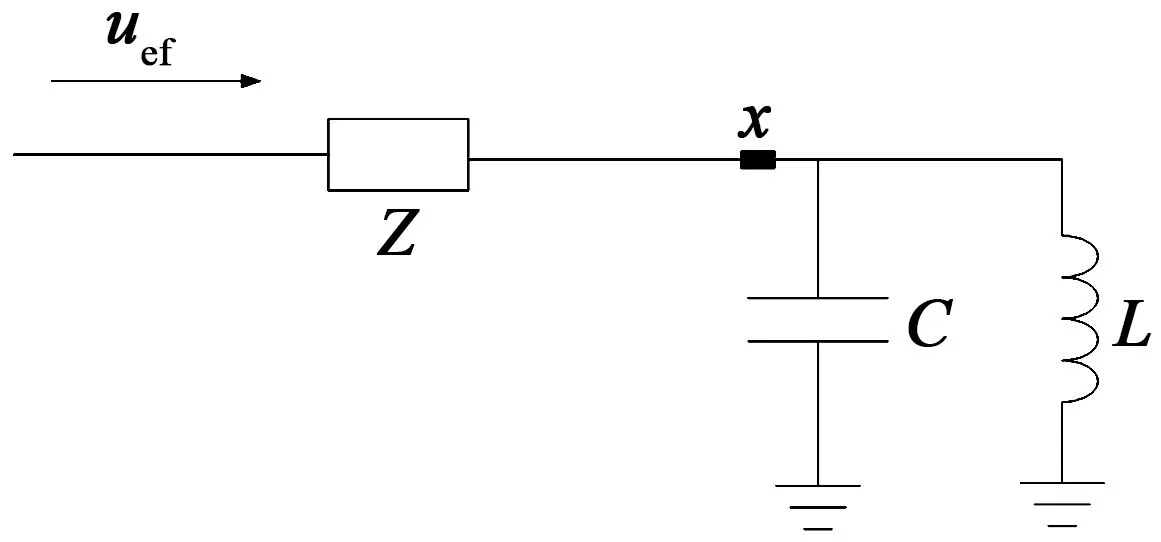
图3 线路末端行波信号的折反射
利用配电网变压器存在的相间杂散电容来获取线路末端电流行波信号,使得配电线路末端行波测距装置既可以检测电压行波信号,同时也可检测电流信号。当系统中存在多个环网柜时,电压行波可能衰减到非常小的值而无法检测,电流行波较电压行波衰减幅度较小,因此仍可检测到电流行波。这样就解决了传统配电网测距中因只检测电压信号导致在某些故障情况下无法准确测距的问题,提高了配电网测距可靠性。
2 分布式行波测距系统
传统上行波测距装置安装在线路两端变电站中,近年出现了分布式行波测距技术,即除线路两端外,行波测距装置还安装在线路中间适当位置,进一步提高测距精度和可靠性。
对于10 kV电缆网络,环网柜作为线路中间节点,是安装行波测距装置的天然场所,与变电站母线、线路末端行波测距装置一起构成分布式行波测距系统。
2.1 总体结构
如图4所示,本故障行波测距系统由3部分组成:安装在变电站、环网柜与线路末端的测距装置;安装在控制中心的主站和通信网。其中,通信网可以是光纤网、无线网或者混合通信网。测距装置可以根据环网柜、线路末端配电室的安装空间及通信条件选择性安装。安装在线路末端的测距装置可接入2路行波信号,安装在环网柜和变电站母线处的测距装置可分别接入8路行波信号监测8条线路。主站根据测距装置在电网中的安装位置,合理选择单端、双端或者广域信息测距算法。
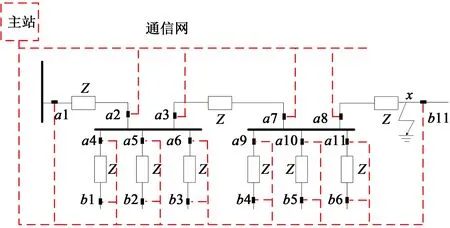
图4 测距装置安装位置示意图
测距终端装置由主控单元、高速数据采集单元、GPS授时模块、通信模块及电源模块等部分构成。终端通过专门研制的电流传感器获取电缆线路的高频暂态行波电流信号,并通过通信模块上传到主站系统。
2.2 故障测距方法及关键技术
2.2.1 电流行波单端测距法
电流行波单端测距原理见图5。设线路长度为l在t0时刻,距测距装置安装处M点x远的F点发生故障,电流行波到达线路M点的时间为t1,故障点和对端的反射行波到达M点的时间分别为t2、t3,得到以下方程组
(3)
式中,V为电流行波的传播速度。
解得
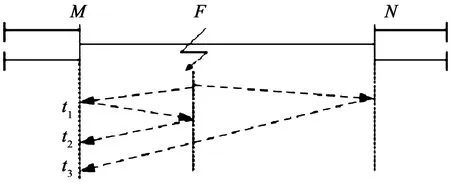
图5 单端测距原理图
2.2.2 电流行波双端测距法
电流行波双端测距原理见图6。t0时刻,F点发生故障,经过t1时间故障行波到达故障测距装置安装点M,故障点和对端的反射行波到达M点的时间点分别为t2、t3,得到下列方程
(4)

测距系统进行故障测距的流程受终端装置安装位置的影响。当仅在变电站母线与环网柜母线安装行波测距装置时,终端装置采集的故障行波信号通过网上通信传给主站,根据信号确定测量点与故障点往返一次的时间,得到故障距离;当仅在变电站母线与线路末端安装行波测距装置时,主站将各测距终端装置进行时钟同步,根据两终端装置采集的故障行波信号时间差和两终端间的距离,得到故障到某一终端装置的距离;当在变电站母线、环网柜母线和线路末端安装行波测距装置时,利用两终端装置采集的故障行波信号时间差和两终端间的距离,得到故障到某一终端装置的距离,并根据某一终端装置测量点与故障点往返一次的时间对故障距离进行验证。

图6 双端测距原理图
2.3 关键技术
2.3.1 高速数据采集
为提高行波测距分辨率和精度,以及满足采集线路末端电流行波信号的需要,设计了基于现场可编程逻辑门阵(FPGA)的高速数据采集单元,单路信号最高采样频率为100 MHz。
2.3.2 传感器采集频带选取
故障暂态行波不同频率分量的波速度不同,但实验表明,对于10 kV电缆线路,当频率大于2 MHz时,波速度将趋于稳定。根据行波测距精度以及抗干扰能力综合考虑,本测距系统采用的传感器频带为2 MHz~100 MHz。
2.3.3 线路末端电流行波获取方法
利用电磁式电流互感器和测距系统的高速采集单元实现对电流行波的100 MHz采集。
3 现场验证
所开发的适用10 kV电缆网络分布式行波测距系统,已在多地投入运行,并成功实现多起实际故障测距。以下分别为TJ变和BZ变某环网柜出线的两次实际故障情况。
图7为TJ变某环网柜出线及行波测距监测点布置情况,行波测距装置安装在各环网柜内,对所有线路出口均进行了监测。某次故障时仅1号、2号和3号环网柜记录到故障电流行波,而4号环网柜行波测距装置未启动,各线路行波波形如图8所示。
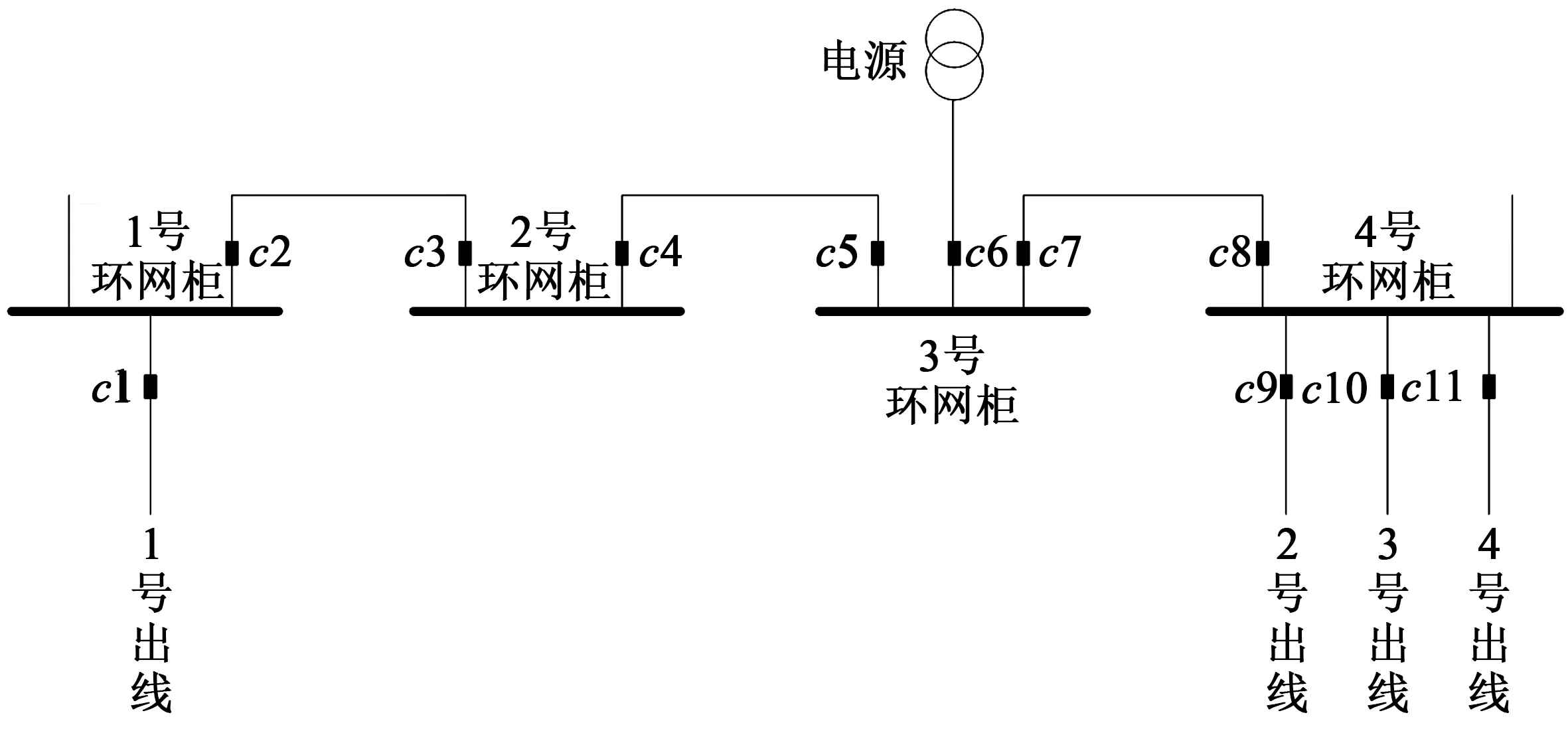
图7 TJ变某环网柜线路结构图
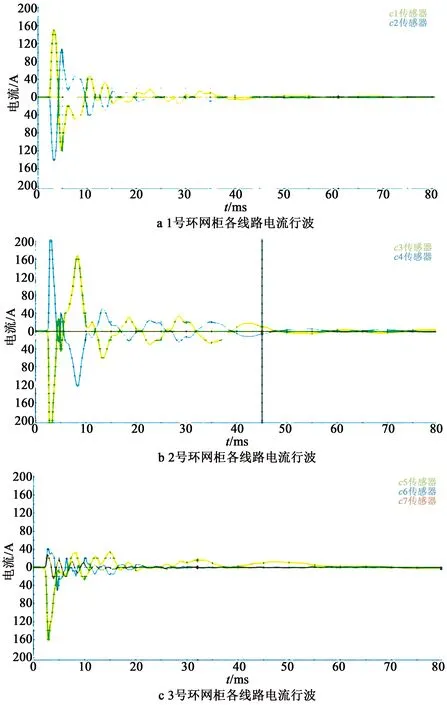
图8 TJ变环网柜线路故障行波波形
根据线路结构与行波信息可判断故障点位于2号环网柜与3号环网柜之间的干线上,距2号环网柜12.4 m、3号环网柜207.6 m。后经检修人员查找,实际故障点距离2号环网柜11 m,测距系统误差小于2 m。
图9为BZ变某环网柜出线及行波测距监测点布置情况,由于环网柜内空间狭小,行波测距装置安装在各出线末端配变处,仅对环网柜各出线的末端进行了监测。某次故障时4个线路末端行波测距装置均正确记录到故障电流行波,各线路行波波形如图10所示。
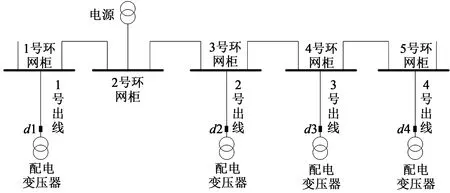
图9 BZ变某环网柜线路结构图
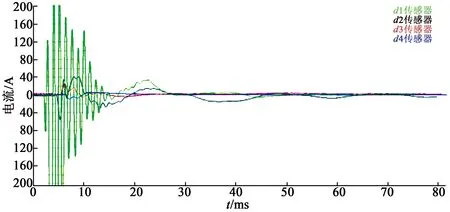
图10 BZ变环网柜线路故障行波波形
根据线路结构与行波信息可判断故障点位于1号环网柜1号出线末端,配电变压器前电缆终端头位置,距离d1传感器仅0.6 m处。检修确认测距结果正确。
从以上两实例可以看出,故障测距系统根据测距终端装置的安装位置不同,采用相应的测距流程,均能准确确定故障位置。该系统适应10 kV电缆网络,测距精度高、可靠性好,可及时确定故障位置以便检修人员处理故障。
4 结论
(1)配电变压器存在的相间杂散电容将使高频行波在短时间内等效为短路状态,使得线路末端也可以检测到电流行波信号。
(2)分布式行波测距系统可根据现场安装空间与通信条件,有选择性地安装于变电站母线、环网柜母线、线路末端,并选择合适的单端、双端或广域测距算法。本系统已在现场实际运行,实际故障测距结果表明该技术是可行、可靠的。