基于多旋翼无人机的烟气监测系统研究
2019-12-25胡伟李成攻
胡伟,李成攻
(1.济南市生态环境局历城分局,山东 济南 250012;2 齐鲁工业大学(山东省科学院)山东省计算中心(国家超级计算济南中心),山东 济南 250014)
环境保护已经成为现阶段社会普遍关注的问题。环境监测是环境保护的基础,准确监测污染物的排放情况是治理废气排放的第一步[1-3]。污染源排放气体的监测主要是鉴别有毒、有害气体成分,监测相关气体浓度以及监控气体排放量。污染治理的实施中需要准确、高效的气体污染物监测技术,烟气排放连续监测技术(CEMS)获得了快速发展,是监督管理的重要手段,也为环境质量评定提供了重要参考。
当前固定污染源普遍安装有CEMS系统,对排放污染物进行连续监测,取得了较好的效果。但现场的CEMS数据易篡改,同时执法人员现场取证耗时长,往往到达取证现场数据已经恢复正常,无法固定证据。
本文基于四旋翼飞行平台,构建烟气监测系统,完成固定污染源的定点、快速取样,实现空中指定位置的导航、悬停、取样、回传,快速完成现场取证工作,为监管提供更加真实、可靠的依据。
1 系统设计
环境监测系统包括旋翼无人机自主飞行系统、机载二氧化硫气体采样系统、机载氮氧化物气体采样系统、机载尘埃采样系统、地面通讯控制基站系统、无线传感网远程通信系统等。系统框图如图1所示。
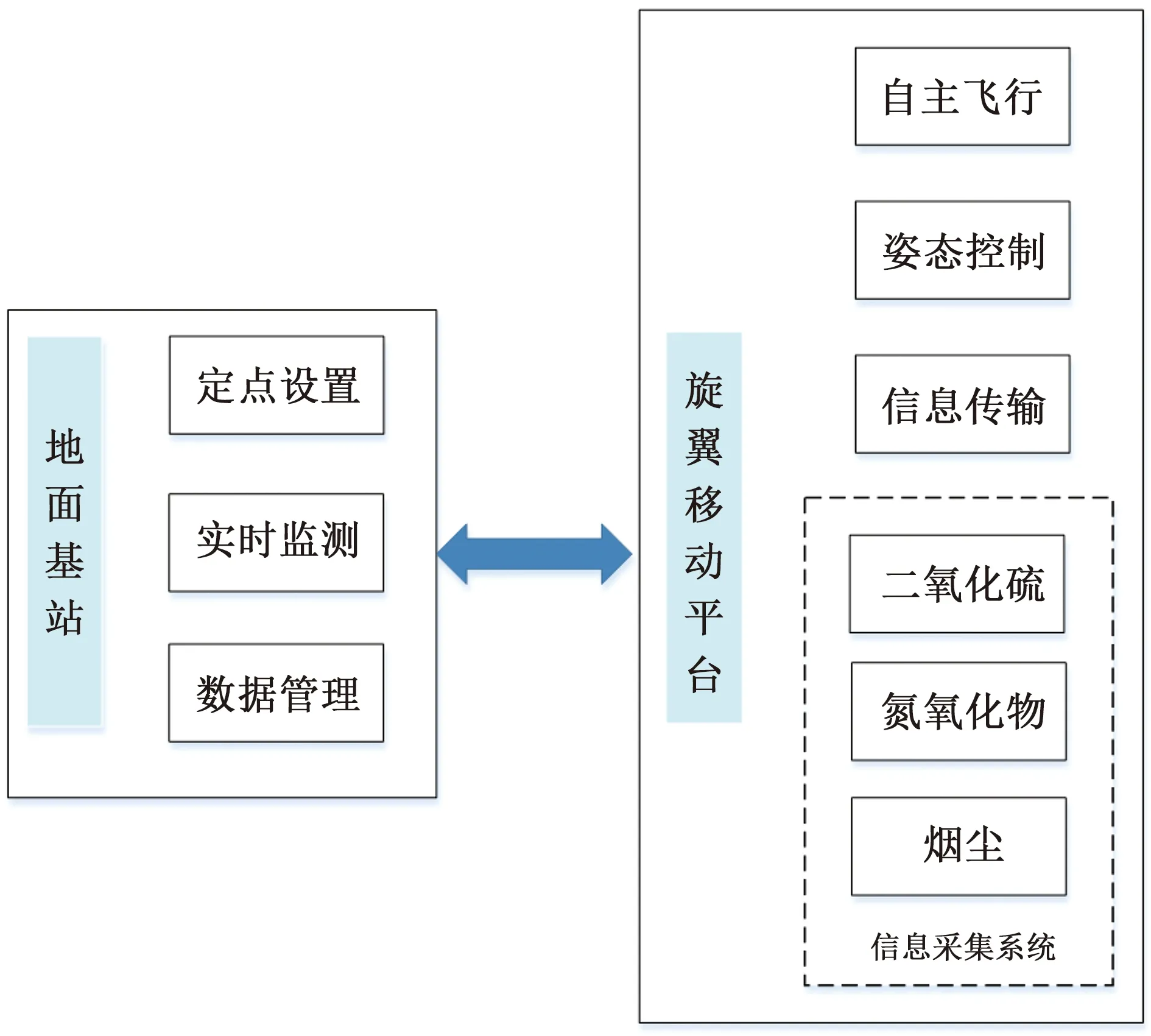
图1 系统总体框架
系统由空中的旋翼移动平台以及地面的工作站组成,旋翼移动平台上搭载有导航模块(含高度计)、烟气检测模块(含抽气泵、温湿度传感器,可检测一个及一个以上的烟气典型参数,如CO、SO2、NO等)、飞行控制模块、隔热隔湿耐腐蚀密封舱以及进行数据通信的无线传输模块。除隔热隔湿耐腐蚀密封舱外,以上模块通过电路彼此相连,实现数据的交互、飞行的控制以及监测数据的采集和传输。待检测的气体通过气泵从舱外吸收到舱内。
1.1 旋翼移动平台
旋翼移动平台由飞行系统、环境信息采集系统、视频信息采集系统和数据传输系统组成,负责进行指定位置和高度的烟气信息采集。该平台具有自主飞行能力和烟气数据在线分析能力,外观如图2所示。

图2 旋翼无人机
通过飞行控制,平台控制无人机飞行到设定的高度和位置后,保持飞行的高度不变,启动抽气泵,烟气检测模块开始工作,进行烟气信息的采集。通过无线传输模块,采集的数据发射到地面工作站。通过导航模块内部的高度计,旋翼平台保持恒定高度,飞行的水平位置的调整由GPS数据确定,无人机始终在设定的水平位置范围内朝高温及烟气浓度最高的位置飞行。返回时,关闭抽气泵,烟气检测模块停止工作。
阶梯式空间格局的产生是受到经济发展以及自然地理条件等多种因素共同作用的结果。东部以及东南沿海地区是经济发展的前沿地区,经济发达、人口众多,机场客流受到政治、经济、人口因素的影响要明显高于旅游因素。区域交通基础设施种类丰富、密度大,区域可进入性条件好,机场对区域可进入性的影响并不十分突出,因此呈现出较低的耦合水平。而西北、东北、西南等沿边地区是典型的旅游资源丰富的地区,却因地理、经济和人口等因素导致交通基础设施相对欠发达,机场建设使得这些区域的可进入性得到根本改善,机场服务的主要对象中旅游者所占比例较大,机场与旅游业之间的互动较为明显,呈现出相对较高的耦合水平。
1.2 地面基站
地面基站负责向移动平台发送任务指令,实时监测移动平台的运行情况,实时接收烟气监测数据和视频采集数据。另外,地面基站还存储移动平台的路径规划和监测点的位置坐标,对传感器采集信息进行后台分析处理,得出最终的监测报告。
1.3 差分基准站系统
导航模块由高度计和GPS模块组成。高度计和GPS模块均与飞行控制模块连接,高度计采用测量气压方式,将其换算成旋翼平台所处的高度值,满足旋翼平台保持恒定高度飞行的需要。旋翼平台通过GPS模块实时获取经纬度、高度、航迹方向、地速(指无人机相对于地面物体的速度)等信息。
GPS 测量是通过地面接收设备接收卫星传送来的信息,计算同一时刻地面接收设备到多颗卫星之间的伪距离,采用空间距离后方交会方法,来确定地面点的三维坐标。
1.4 飞行控制模块
飞行控制模块,采用两级PID控制方式。第一级是导航级,第二级是控制级。导航级PID控制解决飞机如何以预定空速飞行在预定高度以及如何转弯飞往目标等问题。通过算法给出飞机的俯仰角、油门和横滚角。控制级PID依据需要的俯仰角、油门、横滚角,结合飞机当前的姿态解算出合适的舵机控制量,使飞机保持预定的俯仰角、横滚角和偏航角。
1.5 烟气检测模块
烟气检测模块包括依次串联连接的采样软管、温湿度传感器、汽水分离器、过滤器、单向阀、抽气泵和传感器腔。传感器腔上设有若干传感器,传感器腔与清洗泵连接。
烟气检测模块,能够在烟道温度0~650 ℃正常工作。气泵采用德国THOMAS微型真空泵,能够在高温、高湿及强腐蚀气体环境中工作,泵流量能达到0.6 L/min的恒定控制。NO气体浓度测量范围达到0~1200 mg/m3,SO2气体浓度测量范围达到0~13 000 mg/m3,烟尘浓度测量范围0~4000 mg/m3。
2 飞行控制实现方法
2.1 姿态解算
距离排烟口越远烟气扩散越严重,因此,在监测过程中,飞行器需要尽可能地靠近排烟口中心。大型排烟口工作环境恶劣,粉尘、高温、蒸汽、GPS偏移等严重影响无人机飞行安全,更需要良好的控制算法完成姿态控制,实时、准确地获得飞行器的姿态信息,提高飞行器的控制精度和稳定性。本文采用双环补偿滤波算法,外环引用重力场和地磁场进行补偿,内环引用重力场进行补偿,并将修正后的陀螺仪和磁罗盘进行互补滤波,流程如图3所示。

图3 姿态解算流程
2.2 飞行控制方法
飞行控制方法,依据需要的俯仰角、油门、滚转角,结合多旋翼当前的姿态和飞行控制方法解算出合适的舵机控制量,使飞机保持预定的偏航角、俯仰角、滚转角。
多旋翼的飞行控制方法如式1所示:
(1)
其中,ψ是偏航角,θ是俯仰角,φ是滚转角,x、y、z分别表示多旋翼飞行过程中的三维坐标。
姿态解算的核心在于旋转的控制,一般旋转有4种表示方式:矩阵表示、欧拉角表示、轴角表示和四元数表示。本文的飞行控制算法采用四元数保存组合姿态、辅以矩阵来变换向量的方法。
用一个圈表示q是一个四元数:
(2)
四元数的长度(模)表示为:
(3)
对四元数单位化,表示一个旋转:
(4)
四元数相乘,实现旋转组合:
(5)
本文引入运算q(ω,θ),把绕单位向量ω转θ角的旋转表示为四元数:

(6)
为了更方便运算,本文引入q(f,t),把向量f的方向转到向量t的方向,生成表示对应旋转的四元数:

(7)
为了把“四元数表示”转“矩阵表示”,本文引入运算R(q)表示四元数q对应的矩阵:

(8)
多个旋转的组合用四元数的乘法来实现:

(9)
4 实验验证
4.1 烟气检测模块测试
为了真实地检验便携式烟气分析仪的性能,采用配气仪配置出不同浓度的包含所有被测气体的混合气体,然后通入仪表中,待液晶屏上的浓度示值稳定后与配气仪数值进行对比。对比数据如表1所示。

表1 烟气模块测试
从表1可以看出,被测的4种气体浓度值绝对误差小于0.5%,达到预期精度要求。
4.2 实验分析
本文以某电厂某发电机组烟气排放监测为例,进一步说明系统的监测过程和监测效果。系统监测过程如下:
(1)将移动平台放置在平整空旷的地面上,保证移动平台周围5 m内没有遮挡物,且移动平台正上方无障碍物。安装好移动平台的数传天线和图传天线,打开移动平台电源开关,观察移动平台电源电压显示屏,确认每组电源电压大于4.1 V。

图4 主界面
(2)打开地面通讯控制基站,安装好图传天线、数传天线和风速仪,并且将风速仪固定好,依次启动总电源、PC电源、数传电源和图传电源。
(3)基站软件显示屏显示基站控制软件进入自动启动状态,程序启动完毕后进入主界面,主界面如图4所示。
(4)与移动平台连接成功后,即可进行任务执行,首先在地图上双击任务点,进入飞行条件检查阶段,第一步确认是否执行任务。
(5)待GPS卫星信号质量和电池续航能力、风速逐一确认后,将飞行任务路径规划写入移动平台,选择任务点后,轻推地面基站上的油门,移动平台进行自主起飞。
(6)当移动平台到达指定烟气采集任务点后,实时传回烟气数据,移动平台的实时姿态和飞行轨迹等信息也在系统中显示。执行完任务,自动生成监测任务报告。
某电厂某次监测的实时回传数据如表2所示。经过与在线监测数据对比,实时回传数据满足精度要求,更符合当时的运行情况,具有更好的参考价值。

表2 实时回传数据
5 结论
本文设计了基于多旋翼无人机的烟气监测系统,实现了对固定污染源烟气的多点、实时监测。测试结果表明,该系统采样精度高,满足实时监测的需求。与现有固定位置烟气排放采集装置相比,基于旋翼无人机的远程监测系统的采集位置和时间更灵活,同时借助旋翼飞机的快速移动性,能够实现远距离定点烟气排放信息采集,从而为环保部门提供有害气体排放等监测、监管的有力数据支撑。