双足机器人避开奇异位姿补偿研究*
2019-12-24敬成林
敬成林
(贵州财经大学 数统学院,贵州 贵阳 550025)
0 引 言
研究机器人运动学的目的是为了更好地控制机器人[1~3],而奇异位姿将引起双足机器人跌倒导致行走失败,在双足机器人的行走控制算法中,避开奇异位姿是机器人行走控制研究的重点之一。奇异位姿是双足机器人行走过程中,位置雅可比矩阵行列式为零或趋近零引起的。所以,机器人的行走控制中,雅可比矩阵(Jacobian matrix)起着重要作用,位置雅可比矩阵是各关节角矢量的微分运动量,与末端执行器广义位置矢量的微分运动量之间的映射矩阵[4,5]。机器人的运动控制中除位置雅可比矩阵外,还有速度雅可比矩阵、力矩雅可比矩阵,对它们的分析称为一阶运动学或动力学。对机器人一阶运动学的研究是进行运动学特性分析、加速度分析、精度分析,进而进行动力学分析及综合的基础,而一阶运动学分析的核心是建立位置、速度雅可比矩阵。所以,雅可比矩阵是机器人分析及设计的基础。通过分析雅可比矩阵的秩,可以探讨机器人的奇异性。另外,许多有关设计的运动性能指标也都是基于雅可比矩阵来构造的,如,工作空间、灵活度和运动解耦性等。由于雅可比矩阵广泛应用于机器人控制中,因此,它在有关机器人的论文中得到了大量的应用[6~10]。求取雅可比矩阵的传统方法是对机器人的相关正运动学和动力学进行微分求解,通常情况下求解过程和结果都比较复杂。
本文主要探讨位置雅可比矩阵,根据位置雅可比矩阵的特性来分析双足机器人的不同位姿,通过传感器检测关节角数据进行补偿,可以避开雅可比矩阵行列式为零或趋近零时机器人的奇异位姿,得到优化的关节角时间序列,即,得到机器人的行走模式。将此行走模式发送到下位机,这些优化的模式可以用来控制实际机器人,以使机器人成功实现步行运动。
1 雅可比矩阵的基本理论
设x为双足机器人足部位姿的广义位置矢量,是6维矢量。q为机器人的关节坐标矢量,n个关节则为n维矢量。数值解法的主要原理是采用机器人的微分运动求解逆运动学。由机器人的微分运动得到广义位置矢量的微分运动量与关节角矢量的微分运动量之间的关系为Δq=J-1Δx。其中,J为雅可比矩阵。由于雅可比矩阵不一定是方阵,只有左右腿的关节数都为6时,相对足部逆运动学的雅可比矩阵才为方阵。即便雅可比为方阵,如果是病态或奇异阵,也会大大影响解的精确性。
要理解雅可比矩阵,先来看机器人的微分运动。所谓机器人的微分运动,是指机器人关节空间的微小变化与机器人末端执行器广义位置微小变化之间的关系,主要用于机器人末端在世界坐标系中的位姿控制。从末端位姿控制的角度讲,雅可比矩阵是关节角矢量的微分运动量与末端执行器广义位置矢量的微分运动量之间的映射矩阵。下面来分析雅可比矩阵的具体计算方法。
如图1所示,双足机器人一条腿从躯干根连杆开始的由N个关节或连杆构成的机械链,从根部到末端依次用1~N对关节进行编号。末端执行器脚底板固接在第N个关节所在的连杆上,而且假定各连杆的位姿(pj,Rj)已由正运动学求得[11,12]。
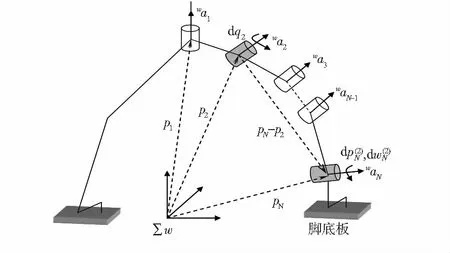
图1 雅可比矩阵计算方法

(1)
式中wa2为在世界坐标系中表示的第2个关节轴的单位矢量,计算方式如下
wa2=R2a2
(2)
事实上,
〈wa2,wa2〉=〈R2a2,R2a2〉=(R2a2)TR2a2
(3)
所以,wa2为世界坐标系下的单位轴矢量。
同样的计算过程可用于从第1到第N的所有连杆。末端的实际微小位移和微小转动就是各关节引起的微位移和微转动的总和,即
(4)
写成矩阵的形式则为

(5)
右边前面的矩阵就是雅可比矩阵,即
(6)
利用上述方法得到的雅可比矩阵的列矢量,代表了关节坐标矢量的一个分量的微分运动量与机器人末端广义位置矢量的微分运动量之间的关系。因此,在求取各旋转关节到双足机器人末端的雅可比矩阵时,需要首先求取当前关节到机器人末端的变换列矢量。
2 在双足机器人行走控制计算中的应用
根据机器人的微分运动得到广义位置矢量的微分运动量与关节角矢量的微分运动量之间的关系为

(7)
式中 dx=[dx1,dx2,…,dx6]T是6维矢量,J(q)为6×n阶矩阵,dq=[dq1,…,dqn]T,n为自由度数。取雅可比矩阵为
(8)
将式(8)写成方程组
(9)
对于式(10),文献[13]给出如下的近似解
(10)
令J(︰,j)=[J1jJ2j…J6j]T(j=1,2,…,n)为雅可比矩阵J(q)的列向量,行向量为J(i,︰)=[Ji1Ji2…Jin](i=1,…,6)。
容易看出,此近似解分母为‖J(︰,j)‖1与‖J(i,︰)‖1的乘积,但在循环中雅可比矩阵的范数‖J(q)‖1或‖J(q)‖∞可能变得很小,尤其对于特殊的奇异位姿会出现这种情况。例如当双足机器人的两腿伸直处于奇异姿态时,由于所有关节角为零而导致雅可比矩阵出现零行向量,由此引起此近似解的至少一个分母变得很小甚至趋近于零,从而关节运动的位置误差放大。为了保证近似解的有效性,将它修正[14]为
(11)
此修正解保证分母不为零,通过传感器数据生成关节角补偿数据Δq,dqj为Δq的分量,以使雅可比矩阵的行列式不为零或不趋近于零,从而使机器人避开奇异位姿。原理图如图2所示。
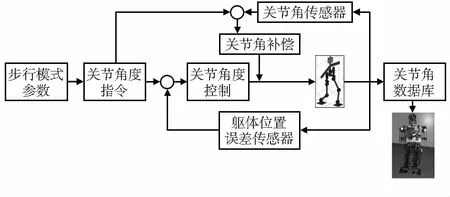
图2 避开奇异位姿关节角补偿方法原理
补偿算法如下:1)给定目标连杆的位姿(pref,Rref);2)定义从躯干到目标连杆之间的关节角矢量q;3)由正运动学计算目标连杆的位姿(p,R);4)计算目标连杆位姿的误差(Δp,ΔR)=(pref-p,RTRref);5)当误差(Δp,ΔR)足够小时停止运算,否则,转下步;6)由传感器检测计算关节角的补偿量Δq;7)q=q+Δq,返回第3步。
3 仿真实验分析
用作者在文献[15]中开发的三维仿真平台进行仿真实验分析。为了分析奇异位姿补偿,设置机器人的非正常位姿,即奇异位姿进行三维仿真研究,怎样让机器人避开奇异位姿是运动学研究的热点。取机器人的2种初始位姿,如图3所示,很明显机器人处于奇异位姿状态。取右脚期望位置为[-0.25,0.35,0]T,左脚期望位置为[0.25,-0.35,0]T,姿态矩阵可以任意取值。
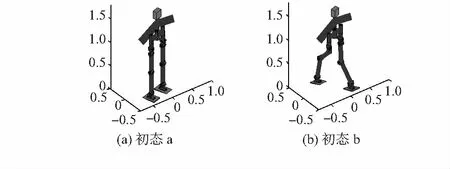
图3 关节角取值在奇异位姿下的姿态
图4所示的三维仿真图为不补偿时机器人到达终点位姿时的姿态。
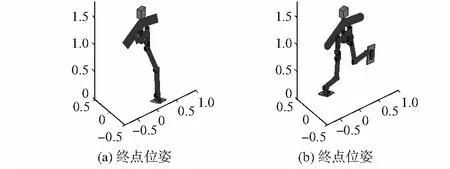
图4 关节角不补偿时奇异位姿运动情况
图3所示两种初态代表了非正常情况下机器人的位姿,称为机器人的奇异位姿。用运动学做三维仿真分析,如图3和图4所示。在循环次数取100次时,图3(a)能够到达终点位姿图4(a),三维仿真机器人的一条腿消失掉;图3(b)也循环相同次数时,机器人到达脚掌与地面不平行的位姿图4(b),说明不进行关节角补偿不能避开奇异位姿。原因是雅可比矩阵在求逆问题中,或循环求解过程中,出现了行列式为零或趋近零的情况,将使通过正运动学或逆运动学求解得到的关节角放大到无穷大,从而出现奇异位姿;在这些情况下,将该算法用于机器人的行走控制,机器人不能实现期望的运动,可能导致跌倒,甚至失控而损坏电机或机器人本体。
由上面三维仿真分析知,必须用式(11)进行关节角补偿,在机器人处于奇异姿态时表现出明显的优势,可以避开机器人的奇异位姿。下面通过仿真平台再现行走控制在式(12)关节角补偿计算下,图3(b)到达期望位姿的过程,来得到机器人优化的行走动作和关节角时间序列。
从图5可以看出,通过关节角补偿,雅可比矩阵参数优化时初态b的左右脚到达期望位姿过程中变化较平稳,而且在到达期望位姿前脚底板始终与地面平行,保证了机器人运动的稳定性,并且循环较少次数就能准确到达期望位姿。从图中还可以看出,初态b为奇异位姿,通过传感器数据补偿,优化的雅可比矩阵都能使非正常位姿恢复正常运动,再一次印证了通过关节角补偿方法,优化雅可比矩阵在行走控制中的重要作用。
4 结 论
本文主要探讨位置雅可比矩阵引起的奇异位姿问题,
根据位置雅可比矩阵的特性来分析双足机器人的不同位姿,通过传感器检测关节角数据补偿方法,优化雅可比矩阵可以避开机器人的奇异位姿,得到优化的关节角时间序列,即得到机器人的步行模式。将此步行模式发送到下位机,这些优化的步行模式可以用来控制实际机器人,以使机器人成功实现步行运动。
