基于Z源逆变器的电动汽车永磁同步电机驱动控制策略
2019-12-24曹青松
许 力,曹青松,易 星
(江西科技学院 汽车工程学院,南昌 330098)
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)由于其体积小、效率高、调速宽、转矩大而在我国电动汽车中应用广泛。作为电动汽车核心技术之一的电机驱动控制系统在车辆行驶过程中如突遇阻力转矩或电池电压突降等工况时,仍需要保证电机平稳运转。通常,电机驱动系统采用传统电压源逆变器,并利用空间矢量脉宽调制算法(Space Vector Pulse Width Modulation, SVPWM)进行调速控制。文献[1]在永磁同步电机矢量模型下建立了模糊PI控制的转速、电流双闭环系统,削弱了电机转矩脉动,加强了电机响应速度与精度。文献[2]提出根据误差绝对值范围不同而引入不同比例或积分环节思想,设计出改进型PI控制器,超调量、稳态误差和转速追踪响应时间均有所降低。文献[3]根据电机转速不同提出速度分区调速方法,电机低速负载能力和最高运行转速得到增强。
在传统逆变器工作过程中,死区和输出电压的降低不可避免,影响波形质量和宽范围调速。浙江大学彭方正教授[4]提出Z源逆变器,允许同一桥臂的直通和输出电压的增益。文献[5]分析电池电压跌落对驱动性能的影响,采用双向Z源逆变器拓扑升高直流母线电压,改善动力性能。文献[6]根据传统脉宽调制策略并保证其谐波性能特征,分析Z源逆变器的连续、断续工作模式。文献[7]根据准Z源逆变器小信号模型,设计出直通占空比的电压电流闭环控制系统,并针对准Z源逆变器的特殊性,对空间矢量调制加以改进,以提高直流或交流负载的干扰性。文献[8]根据不同车速对直流母线电压增益与否来改善汽车动力性能,适用于宽调速运行、转矩和功率频繁变化场合。文献[9]利用电感型Z源逆变器高增压特性,调整电机输入电压,构建一种抑制转矩脉动的控制方式。
根据上述研究背景,本文设计基于双向Z源逆变器的永磁同步电机驱动系统,建立永磁同步电机的数学模型,研究Z源逆变器空间矢量调制算法,确定零矢量的插入时刻,采用转速外环、电流内环的控制方式,仿真验证电机控制效果。
1 电动汽车驱动系统方案
电动汽车永磁同步电机驱动控制系统方案见图1所示,由蓄电池、双向Z源逆变器模块、永磁同步电机、位置与速度检测模块、速度与电流控制模块、SVPWM生成模块等组成。电机输出的三相电流经过坐标变换得到dq坐标系上的值。d轴电流与参考值比较后送入电流控制器。同时,通过位置与速度检测模块检测出永磁同步电机转速并与其参考值比较后,经转速控制器得到q轴参考电流,在与实际电流值比较后送到电流控制器。将两个经过比较后的值经过Park逆变换后送入PWM生成模块得到PWM信号来控制逆变器桥臂开关的通断。其中,d轴电流,直通占空比和转速为此驱动系统的3个控制参考值。

图1 电机驱动用Z源逆变器控制系统示意图
2 永磁同步电机数学方程及其坐标变换
根据永磁同步电机电气关系,忽略定子涡流和磁滞等损耗,三相静止ABC坐标系下的电压方程为[10]
(1)
式中,ua、ub、uc分别为三相定子绕组相电压,ia、ib、ic分别为三相定子绕组相电流,ψa、ψb、ψc分别为三相定子绕组产生的磁链,Rs为电枢电阻。
在电机驱动控制系统中,为了控制简单,需将电机在ABC坐标系的方程转换成两相静止αβ坐标系和两相旋转dq坐标系的方程。ABC坐标系到αβ坐标系的Clark变换矩阵及逆矩阵为
(2)
(3)
αβ坐标系到dq坐标系的Park变换矩阵及逆矩阵为
(4)
(5)
3 Z源逆变器工作原理
Z源逆变器驱动的永磁同步电机拓扑如图2所示,由直流电源、Z源网络、三相逆变桥和永磁同步电机组成。其中,Z源网络由对称电感和电容组成,与直流电源和传统三相电压型逆变器耦合。

图2 基于Z源逆变器的永磁同步电机系统
由于Z源网络的存在,三相逆变桥在传统6个有效矢量和2个零矢量基础上多了直通零矢量,其直通态和非直通态的等效电路如图3所示。


图3 Z源逆变器的等效电路
直通状态下,VC+VL=Vd,VL=VC=0.5Vd。非直通状态下:VC+VL=V0,VL+Vi=VC。如果直通时间为T0非直通时间为T1,根据伏秒平衡原则,稳态时电感平均电压为0,即
(6)
(7)

(8)

4 Z源逆变器的SVPWM算法
矢量调制算法由3个步骤组成:扇区判断,作用时间和切换点的计算。
4.1 扇区判断
电机输入电压Uref所在扇区由在αβ坐标系下的两个分量决定,如图4所示。


图4 空间矢量扇区

表1 扇区表
4.2 作用时间及切换点的计算
令两个相邻非零矢量作用时间分别为T1,T2,传统零矢量作用时间为T0,直通零矢量作用时间为t0,根据图4可知各矢量的作用时间为
(9)
式中,D为直通零矢量占空比。将直通零矢量完全代替传统零矢量,以最大程度提升增压比。将直通零矢量平均分为6等分,插在开关切换的时刻,且一个周期内直通次数由3个桥臂均分,如图5所示。上桥臂S1, S3, S5的切换时间为

(10)
下桥臂S4, S6, S2的切换时间为
(11)

图5 插入直通矢量的PWM波形
5 系统仿真
5.1 系统仿真模型及参数
根据图1及以上分析,采用Matlab/Simulink软件建立PMSM矢量控制系统仿真模型,如图6所示,系统模型由双向Z源逆变器模块、SVPWM模块、坐标变换模块、位置与速度检测模块和PI调节模块组成,采用转速外环、电流内环的控制方式。在SVPWM模块内得到6路包含直通矢量的PWM信号,对Z源逆变器进行矢量调制。同时,对同一桥臂上下两开关的PWM信号进行“AND”操作得到三路信号后进行“NOR”操作获得一路信号,作为直流侧反向并联开关管的驱动信号。
其中,Z源网络参数取电感L1,L2为10 μH,电容C1,C2为33 μF。永磁同步电机参数取d轴电感5.25 mH,q轴电感12 mH,定子电阻0.958 Ω。载波频率为10 kHz,直通占空比为0.2,调制度为1。直流电源为600 V。

图6 永磁同步电机矢量控制模型
5.2 仿真结果与分析
仿真总时间为0.3 s,在0.15s时刻突加10 Nm 的阻力转矩,转速参考值为1000 r/min。输出电磁转矩波形如图7所示,阻力转矩施加之前,电磁转矩趋于0,阻力转矩施加之后,在“10 Nm” 上下波动,以平衡阻力转矩。转速波形如图8所示,在0.05 s时,转速达到参考值,永磁同步电机经过外加阻力转矩作用后,在0.02 s内恢复到原转速值,结果表明本调速方法达到稳定时间短,抗外界干扰能力强。电机输入线电压波形如图9所示,符合正弦分布规律,可使磁链趋于理想圆,并有效减少谐波的产生。电机输出相电流波形如图10所示,波形趋于正弦波,谐波含量少,并且对外界阻力转矩响应快。图11为蓄电池电压陡降到300 V时的转速波形,与图7比较可知,两波形相差不大,表明空间矢量调制的双向Z源逆变器在电池电压陡降时,可以表现良好的稳定性。

图7 电磁转矩波形
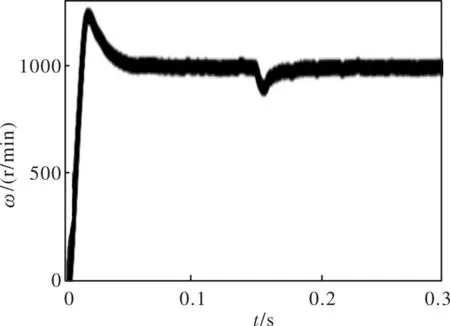
图8 转速波形

图9 电机输入电压波形

图10 电机输出相电流波形

图11 电源电压降为300V时的转速波形
6 结 语
本文采用双向Z源逆变器,通过空间矢量调制方式对电动汽车永磁同步电机进行施加外部阻力转矩和蓄电池电压突降两种工况下的调速研究。提出通过改变直通占空比的大小对直流母线电压进行升压的控制策略。仿真结果表明此种调速方式具有良好的抗负载干扰能力和抵抗蓄电池电压陡降时的影响,有效保证电动汽车行驶平稳性,具有一定的工程实用价值。
