基于不同控制算法的斜拉桥MR阻尼器半主动控制研究
——以当今世界最长最宽多塔斜拉桥(嘉绍大桥)为例
2019-12-23方自奋
方自奋
(厦门合立道工程设计集团有限公司 福建厦门 361004)
0 引言
桥梁是当今社会最重要的社会基础设施之一,地震来临时,桥梁能否保证其正常使用功能直接影响着抗震救灾行动。近几年,我国不少地方发生了几次大地震,因为在地震来临之时没有办法保证桥梁的抗震性能,交通枢纽受到了破坏,导致我国经济受到了严重的损失,这种次生灾难产生也使很多无辜生命受到牵连。因此,人们在建设桥梁时都必须考虑其抗震能力,以减少灾害损失的程度[1]。而在桥梁抗震分析中,基于磁流变阻尼器的半主动振动控制,因其所需较少能源便能发挥较大功用的特性,且兼具被动和主控制的优点,成为目前最具发展前景的科研型课题之一[2-5]。但是,在半主动控制中,不同的控制算法对控制设计系统影响较大,所设计出来的控制力控制特性也有较大区别。因此,本文以浙江嘉绍大桥为例,在基于ANSYS与MATLAB相互调用的基础上数值仿真浙江嘉绍大桥的有限元基准模型,并且对其进行了LQR经典最优控制与独立模态控制分别结合限界Hrovat最优控制两种不同控制算法的半主动振动控制分析,讨论这两种不同控制算法对于该桥梁半主动振动控制的影响。
1 基本理论公式
1.1 受控系统的数学状态描述
假定嘉绍大桥结构模型自由度为n,控制装置产生的控制力为U(t),受到外界环境干扰力为F(t),则该系统的受控运动方程[6]为:
(1)
式中X(t)为结构位移向量;
M、K和C分别为结构质量、刚度和阻尼矩阵;
Ds、Bs分别为环境干扰力和控制力位置矩阵。

(2)

其中,In∈Rn×n为单位矩阵;0n为维零矩阵。
1.2 LQR经典最优控制
定义系统的二次型性能泛函为:

(3)
式中,Q是系统状态矢量的权矩阵,为半正定矩阵;R是结构控制力的权矩阵,为正定矩阵。
大桥整体系统状态控制的任务为:在控制系统受到外界因素影响而偏离平衡状态时,能够施加以较小能量的控制输入,使得系统趋近于平衡状态。那么,LQR经典最优控制的问题就是在[t0,∞]范围内,求解最优控制力U(t),将系统由Z0状态向零状态附近转移,并且使得性能泛函J取得最小值。
根据Riccati方程及变分法原理求解,可以得出最优控制力为:
U(t)=-GZ(t)
(4)
G=R-1BTP

1.3 独立模态控制算法
将运动方程(1)转化为广义坐标方程,令系统的无阻尼阵型(模型)矩阵为Φ,可以通过模态变换[7]
X(t)=Φq(t)
(5)
式中,q(t)为体系的广义模态坐标向量。
联立(1)、(5)方程式,并且左乘ΦT,可以得出广义模态坐标向量运动方程:
(6)
式中:
U*(t)=ΦTBsU(t)=LU(t)
(7)
(8)
其中,L=ΦTBs为n×p维矩阵,p为控制器数目。
则对于式(6),总可以采用其他算法求出体系的方程最优控制力U*(t),表示为:
(9)

(10)
由式(5)、(7)和(10)联立可得:
(11)
其中:
(12)
1.4 限界Hrovat最优控制算法
基于MR阻尼器的限界Hrovat最优控制算法,可以通过以下公式表达[6]:
(13)

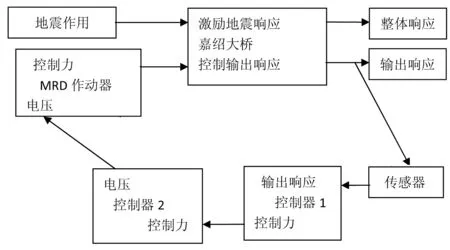
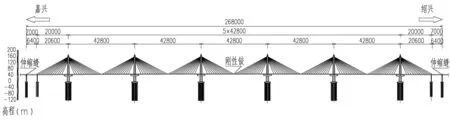
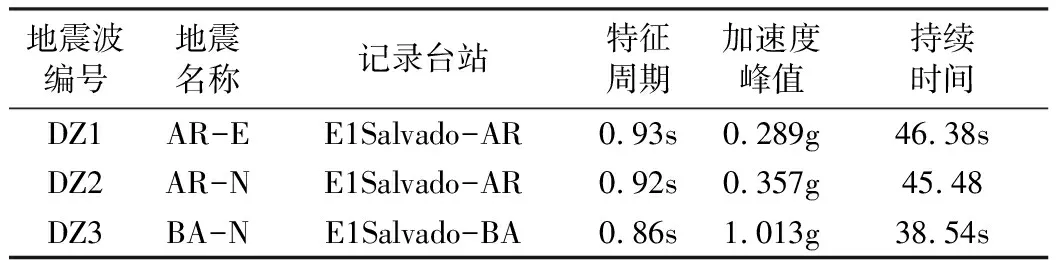
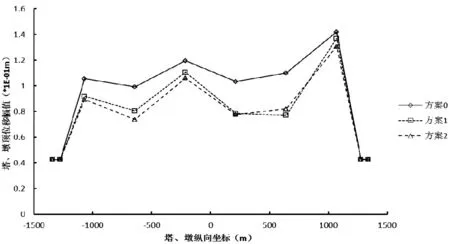
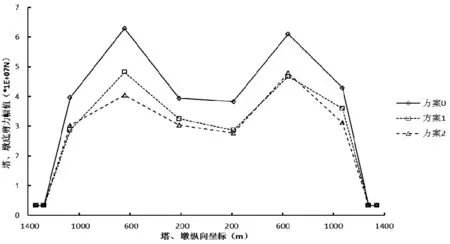
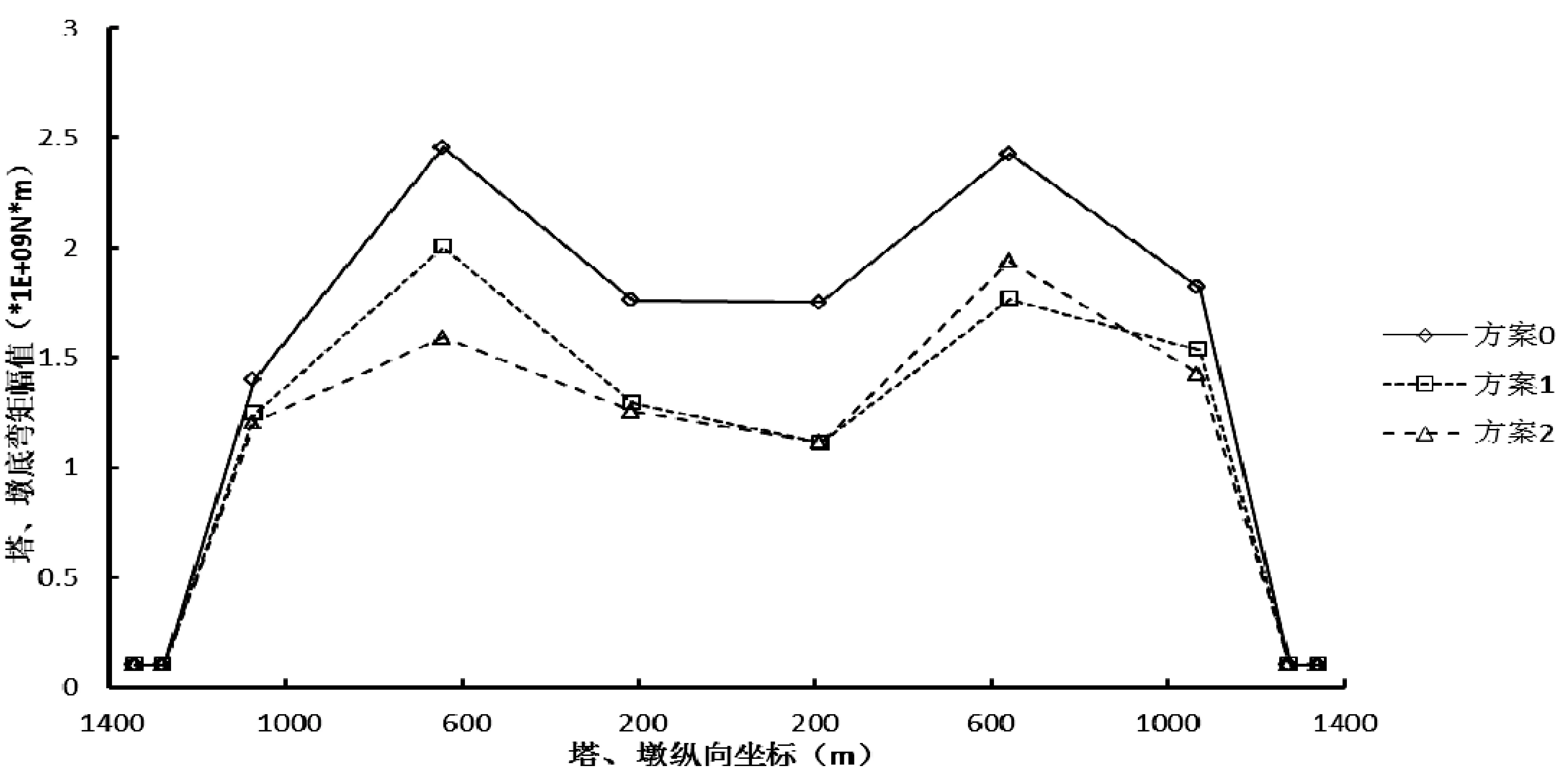
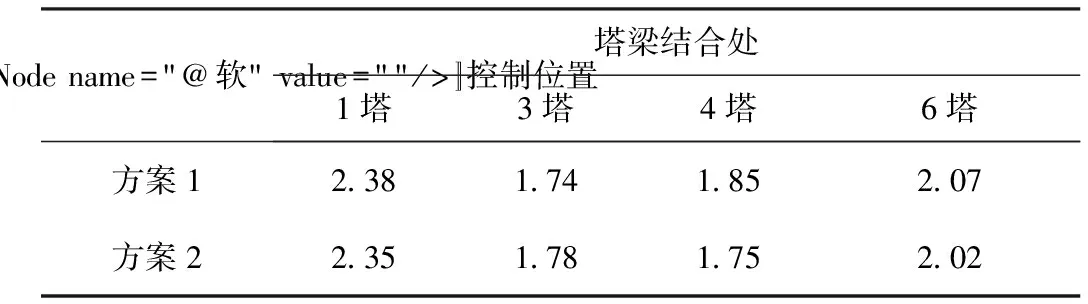
当磁流变液阻尼器所安装的位置的振动方向与最优主动控制力方向相反时,且|u|≥udmax,通过调整参数施加阻尼器的最大阻尼出力;当振动方向与最优主动控制力方向相反时且|u| 磁流变阻尼器控制系统,由传感器(包括数据采集仪器)、控制器和磁流变阻尼器作动器三部分组成,具体流程为[8]:首先,通过传感器测量嘉绍大桥在地震作用的结构响应,反馈到控制器电脑当中;然后,控制器电脑按照设计好的LQR经典最优控制,或独立模态控制,结合限界Hrovat最优控制算法,计算出半主动控制力,再根据半主动控制力由针对于MRD的算法计算出所需施加在磁流变阻尼器上的电压;最后,将所计算电压施加到磁流变阻尼器上,驱动磁流变阻尼器产生所需要的控制力,实现结构的半主动控制,如图1所示。 图1 半主动控制流程 桥梁在地震作用下的外部控制力可以表示为: (14) 式中,G1和G2分别为控制力对位移和速度的反馈增益矩阵。 将式(14)代入式(1)即可得到运动方程为: (15) 从式(15)可以看出,斜拉桥半主动振动控制的原理,即通过对结构施加控制力,改变结构自身刚度和阻尼等动力特性,控制结构在地震作用下振动响应。 该控制系统磁流变液杆系阻尼器作为作动器,是建立在结构具有相对位移的前提下才能发挥其功用。经过对嘉绍大桥有限元基准模型的进一步分析,可以知道,模型里面仅有从左侧起1塔、3塔、4塔、6塔塔梁结合处及墩梁结合处具有纵向相对位移。本文将磁流变液阻尼器沿纵向施加在1塔、3塔、4塔、6塔塔梁结合处,即在该塔梁结合处施加纵向控制力,塔梁结合处的控制力同时作用在主塔及主梁上,作用的主梁及主塔上的控制力大小相等,方向相反。因为主梁为柔性构件,施加在主梁上的纵向控制力,除了可以减少主梁纵向响应以外,还可能对主梁竖向响应起到控制效果;而主塔为刚性构件,施加在主塔的纵向控制力几乎对主塔的横向响应没有控制效果。 综上所述,可以得出本文针对嘉绍大桥主要振动控制目标为:主梁纵向位移、主梁竖向位移、主塔纵向位移、主塔纵向剪力、主塔纵向弯矩以及塔(墩)梁结合处相对位移。 通常主动及半主动振动控制,只需要建立起输出响应与控制力之间的反馈关系即可,而基于磁流变阻尼器的半主动振动控制还需求解出施加在磁流变阻尼器上的电压,因为施加在阻尼器上的电压并不与阻尼力成线性关系。目前主要求解磁流变阻尼器控制电压的算法,有Bing-Bang控制算法、基于Lyapunov稳定性理论的控制算法及Clipped-Optimal剪切形最优控制算法等[9]。本文求解磁流变阻尼器控制电压的算法为基于Lyapunov稳定性理论的控制算法。 通过以上原理,采用Lyapunov函数设计磁流变阻尼器控制器,如式(16)所示[10]: (16) 式中: (17) ATP+PA=-QP (18) 对式(16)求导,可以得出: (19) vi=VmaxH((-z)TPBifi) (20) 式中,Vmax为磁流变阻尼器上可施加的最大电压值; Bi为控制力位置矩阵B的第i列; fi为控制器计算出来第i个磁流变阻尼器所贡献的阻尼力; vi为计算所需施加在磁流变阻尼器上的控制电压; H为权函数。 表达式为: (21) 浙江嘉绍大桥自绍兴上虞起,跨越钱塘江水域至嘉兴海宁,采用的是典型的六塔独柱四索面钢箱梁斜拉桥设计方案,桥跨跨径布置为70+200+5×428+200+70m,主桥由连续的五跨六塔斜拉桥所组成,每跨428m,宽度为55.6m,全桥长度为10.137km,结构形式为两个三塔一联对称结构,两个三塔之间采用一抽屉型刚性铰相连接。桥梁设计基准期为100年,抗震设防烈度为6度,场地土类别为Ⅳ类,如图2所示。 图2 嘉绍大桥结构布置详图(单位:cm) 根据嘉绍大桥桥址的地质条件,在太平洋地震研究中心选取3条适应该工程的地震波,并将此3条地震波加速度时程曲线峰值调为0.1392g,表1为所选取3条地震波初始参数,图3为调整后的加速度时程曲线。 表1 选取地震波参数 (a)DZ1 (b)DZ2 (c)DZ3 图3 地震波加速度时程曲线 将所选取的地震波按1(纵桥向)+0.65(竖桥向)模式输入嘉绍大桥有限元模型当中,进行两种不同控制算法的半主动振动控制模拟。其中,令模型没有采取任何控制措施为方案0;对模型进行LQR半主动控制为方案1;对模型进行独立模态半主动控制为方案2。选取3条地震波计算结果最大值分析,图4为嘉绍大桥控制效果对比图。 由图4可以看出: (1)未施加控制前,主梁纵向位移形状近似为两个相近的V字形,钢性饺部位及墩跨位置幅值最大,主梁竖向位移形状近似为余弦函数形,除左墩跨跨中幅值较小外,各跨跨中幅值较为接近,塔(墩)梁结合处相对位移形状近似为W形,墩跨位置幅值最大。 (a)主梁纵向位移控制效果图 (b)主梁竖向位移控制效果图 (c)塔(墩)梁结合处相对位移控制效果图图4 主梁控制效果对比图 (2)基于LQR经典最优控制与独立模态控制分别结合限界Hrovat最优控制的两种半主动振动控制,针对主梁地震响应均有较好的控制效果,其中,方案1针对主梁的纵向位移控制效果最大可达28.5%,针对主梁的竖向位移控制效果最大可达30.6%,针对塔(墩)梁结合处相对位移控制效果最大可达30.6%;独立模态半主动控制,针对主梁的纵向位移控制效果最大可达29.3%;方案2针对主梁的竖向位移控制效果最大可达32.7%,针对塔(墩)梁结合处相对位移控制效果最大可达29.1%。 (3)主梁地震响应,除较少区域采用LQR经典半主动控制控制效果更好外,其余区域均是采用独立模态半主动控制效果更优。如,主梁右边跨跨中的纵向位移,方案1控制效果为14.8%,而方案2控制效果为28.8%;主梁中跨跨中的竖向位移,方案1控制效果为20.8%,而方案2控制效果为32.7%;左侧墩梁结合处的相对位移主梁,方案1控制效果为3.5%,而方案2控制效果为12.8%。即主梁地震响应整体上采用独立模态半主动控制,控制效果相对于LQR经典半主动控制更优。 图5是主塔(墩)控制效果对比图,由图5可以看出: (a)塔(墩)顶纵向位移控制效果图 (b)塔(墩)底纵向剪力控制效果图 (c)塔(墩)底纵向弯矩控制效果图图5 主塔(墩)控制效果对比图 (1)未施加控制前,主塔塔顶纵向位移6塔最大,3塔其次,其余各塔较为接近;主塔纵向剪力及弯矩分布趋势相似,除2、5塔较大外,其余各塔较为接近。 (2)基于LQR经典最优控制与独立模态控制分别结合限界Hrovat最优控制的两种半主动振动控制,针对主塔地震响应均有较好的控制效果,其中,方案1针对主塔塔顶的纵向位移控制效果最大可达30.4%,针对主塔塔底的纵向剪力控制效果最大可达28.1%,针对主塔塔底的纵向弯矩控制效果最大可达31.4%;方案2针对主塔塔顶的纵向位移控制效果最大可达27.4%,针对主塔塔底的纵向剪力控制效果最大可达35.7%,针对主塔塔底的纵向弯矩控制效果最大可达35.2%。 (3)主塔地震响应,除较5塔采用LQR经典半主动控制,控制效果更好;4塔采用两种控制方案,控制效果几乎一样外,其余区域均是采用独立模态半主动控制效果更优。如2塔塔顶的纵向位移,方案1控制效果为18.8%,而方案2控制效果为25.7%;2塔塔顶的纵向剪力,方案1的控制效果为23.7%,而方案2的控制效果为35.7%;2塔塔顶的纵向弯矩,方案1的控制效果为18.9%,而方案2的控制效果为35.2%。即主塔地震响应,整体上采用独立模态半主动控制的控制效果,相对于LQR经典半主动控制更优。 (4)由于墩梁结合处释放纵向位移约束,且没有施加磁流变液阻尼器,桥墩在纵向自由度上类似于独立悬臂梁结构,桥墩的地震响应不受控制影响。 本文在对嘉绍大桥有限元模型进行基于LQR经典最优控制与独立模态控制分别结合限界Hrovat最优控制的两种半主动振动控制进行模拟的时候,调整控制参数,使两种半主动控制的控制出力尽量相近。以下分别给出两种方案中,1塔塔梁结合处作用在主梁上的控制力时程,及所有阻尼器施加位置上的最大控制出力,如图6~图7所示。 图6 方案1控制力时程曲线 图7 方案2控制力时程曲线 表2是各塔半主动控制最大出力(×107N)。 表2 半主动控制最大出力(×107N) 基于目前国际上磁流变阻尼器500kN的最大阻尼出力及表2可知:要完全实现计算所得的控制最大出力LQR经典半主动控制至少需要162(48+35+37+42)个磁流变阻尼器,而独立模态半主动控制至少需要159(47+36+35+41)个磁流变阻尼器。即采用独立模态半主动控制所需的控制代价低于LQR经典半主动控制所需的控制代价。 本文将所选取地震波按考虑地震波剪切波速为1000,且输入方式为1(纵桥向)+0.65(竖桥向)模式输入嘉绍大桥有限元模型当中,然后再针对嘉绍大桥的地震响应,进行基于LQR经典最优控制与独立模态控制,分别结合限界Hrovat最优控制两种不同控制算法的半主动振动控制模拟,最后对这两种不同控制方案进行了控制出力、主梁控制效果及主塔控制效果三方面的对比分析。 通过本文前面的对比分析可以发现,采用独立模态半主动控制相对于LQR经典半主动控制具有:(1)控制所需的磁流变阻尼器个数更少;(2)针对主梁地震响应(主梁纵向位移、主梁竖向位移及塔(墩)梁相对位移)控制效果更优;(3)针对主塔地震响应(主塔纵向位移、主塔纵向剪力及主塔纵向弯矩)控制效果更优。即采用独立模态半主动控制相对于LQR经典半主动控制,可以在较少控制代价的前提下取得更优的控制效果,验证了本文所选独立模态控制算法,结合限界Hrovat最优控制算法,作为主要半主动振动控制算法,针对嘉绍大桥这一实际工程项目具有较好的优越性与适用性。2 MR阻尼器控制系统设计
2.1 斜拉桥基本控制原理
2.2 控制目标
2.3 MR阻尼器控制算法

3 数值模拟
3.1 背景工程

3.2 控制效果分析



3.3 控制力对比


4 结论