多方位超声波倒车防撞系统设计
2019-12-20潘康福周西峰郭前岗
潘康福, 周西峰, 郭前岗
(南京邮电大学 自动化学院,江苏 南京 210046)
0 引 言
目前由于辅助倒车雷达设备普遍比较昂贵,且只能探测水平方向,许多大货车等未装倒车系统[1,2]。为此,本文设计了一种低成本、性能好的超声倒车辅助系统。系统包含8个超声探头,除了可以像传统超声雷达检测水平方向障碍物之外,还可以探测地面是否有凸起或者沟壑以及车后上方是否有障碍物。若有障碍物,通过显示屏实时显示距障碍物的距离并显示障碍物类型。一旦距离障碍物小于设定的距离,报警系统报警提示。该系统成本低,可以安装在大货车等车型上,提高倒车安全。
1 系统整体设计
系统主要由控制单元、超声波探测模块组、温度补偿模块、电源模块、数据设置模块、报警模块、显示模块等组成。其中超声波模块组共有8个探头,分成3组,分别用于探测水平方向、地面以及斜向上方的障碍物。如图1所示。

图1 系统总体设计
工作过程中当汽车挂倒挡时,系统开启。控制单元控制8个超声探头轮流发射超声波,超声波遇到障碍物反射并被接收。根据超声波在空气中的传输时间计算出超声探头与障碍物的距离。并将计算出的数值通过LCD1602显示屏显示,控制单元比较所测距离与设定的安全距离,然后命令报警模块发出相应的报警提示。鉴于超声波传播速度受温度变化影响较大,系统加入了温度补偿模块以校正声速。
2 探测原理
系统探测的原理示意如图2所示。将8个超声探头分为3组,分别用于探测地面、空中及水平方向障碍物。探头朝向如图2所示。
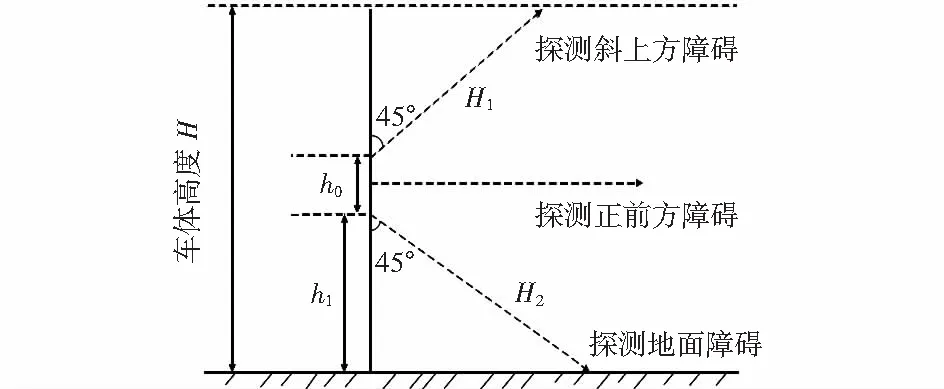
图2 系统探测原理
探测地面障碍物的探头距地面高度为h1,则正常无障碍物情况下探头到地面的距离H2为H2=h1/sin 45°。
将地面安全阈值设置为15 cm。当测得的距离大于(H2+15)cm时,判定路面有凹陷;当值小于(H2-15)cm时,判断地面有凸起障碍。
已知车体高度为H,斜向上探头距离斜向下探头的竖直距离为h0。则根据三角关系可以得到斜向上方向探头有障碍的临界距离H1=(H-h1-h0)/cos 45°。
当所测距离小于H1时,表示车的后上方有障碍物,提示司机小心。鉴于车型不同,探头安装位置亦不同。其中的H,h1,h0应该根据实际情况通过数据设置模块进行设置。
3 硬件设计
3.1 超声波测距模块设计
为了精简电路,设计直接采用了集成的超声波测距模块HC—SR04,模块可提供2~400 cm的距离测量,测距精度可达3 mm。该模块共有4个引脚,控制单元只要给TRIG接口输入时间达到10 μs的高电平信号,模块内部就会自动产生8个40 kHz的脉冲。在此之后,超声波发射器发出超声波信号,同时回响输出信号变为高电平。当发出的超声波信号遇到障碍物反射回来被超声模块接收到以后,回响信号会变为低电平。高电平持续的时间就是超声波在空气中的传输时间。在已知声速时,可由渡越时间法[3]求出探头到障碍物的距离。
本系统的超声波测距模块具有8个探头,HC—SR04的回声(ECHO)信号均需要接入单片机的外部中断,因此,必须分时复用。如图3所示,本系统选用了一个74HC151多路信号复用芯片[4],可以按照单片机的命令,分时将8个探头的ECHO端与单片机的外部中断口进行连通。
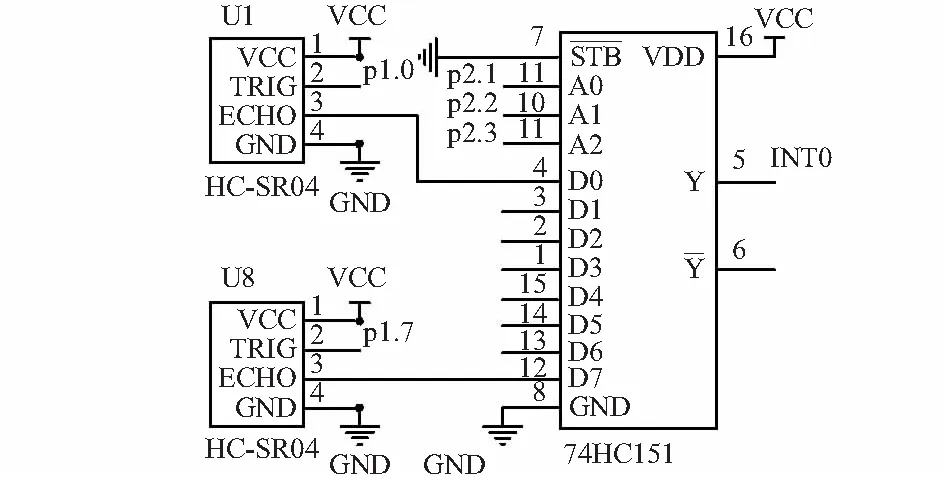
图3 超声模块电路
3.2 显示模块设计
选用LCD12864液晶显示屏作为显示模块,采用串行连接方式[5]。显示模块在本系统中主要起显示3个方向探头与障碍物的距离的作用。当探测到地面上有沟壑或凸起时,不仅显示距离,还汉字显示障碍物类型,车后上空有障碍物时也会配合报警装置汉字提示。
3.3 温度补偿模块设计
超声波在空气中传播声速受温度影响较大[6],需要测量环境温度以校正声速,减小环境温度对系统测量精度的影响。系统采用美国DALLAS公司的DS18B20数字式温度传感器。传感器具有体积小、电路简单、测量精度高等优点。只需要占用单片机一个输入/输出(I/O)口即可实现温度的测量。
3.4 报警电路设计
主要采用ISD1700语音芯片设计语音报警电路。ISD1700系列语音芯片具有集成度高、性能好的优点。不仅音质好,而且能够实现多段录音,可以很好地满足实际需求。当超声波探测到障碍物,语音模块能够根据障碍物类型发出相应的提示信息。
4 系统软件设计
系统采用模块化设计[7],主工作流程如图4所示。车子挂倒挡,系统启动,首先将各个模块初始化。首先1个探头发射超声波,延迟等待是否收到回波。如果有回波,记录下超声波从发射到接收到的时间,再根据温度补偿校正过的声速,计算出到障碍物的距离并显示,如果发现障碍物,在显示屏上显示是什么障碍,8个探头循环工作。
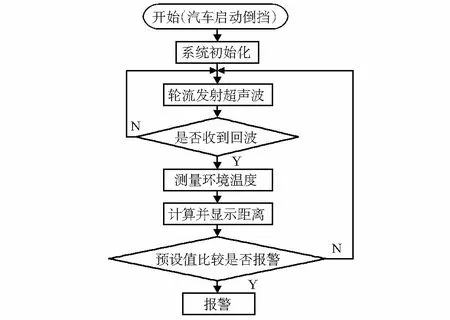
图4 主流程
3个方向上探头报警的软件设计依据如下:
1)水平方向探头:当探测距离小于预设安全距离时,发出报警。
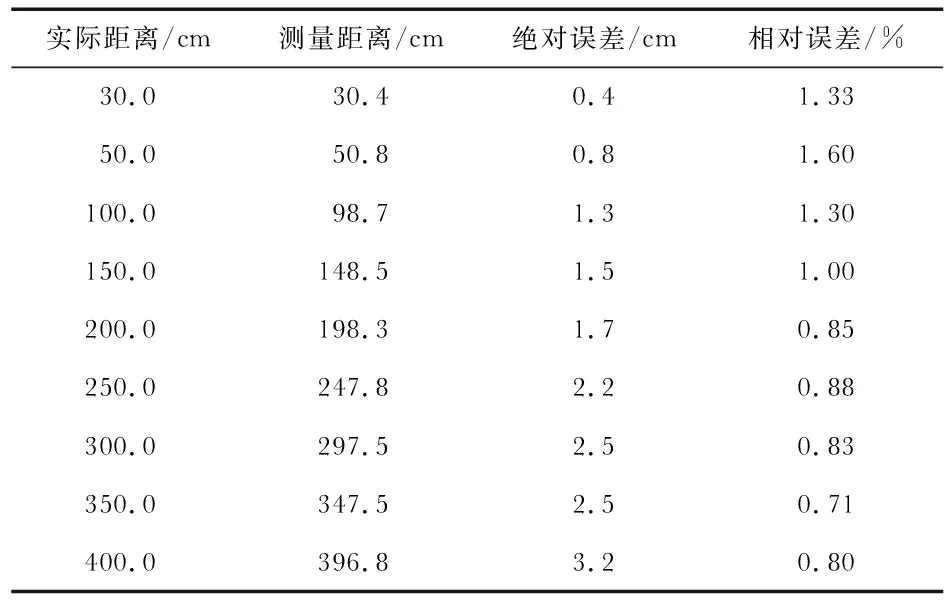
2)斜向下方向探头:当探测距离d满足d 3)斜向上方向探头:当探测距离d 各个方向上的临界安全距离与设定的安全阈值运算后得到的即为对应方向上的安全距离。 系统水平测距实验的数据如表1所示。测量距离为系统显示屏上显示的距离。可以看出,最大相对误差为1.60 %,基本可以满足倒车需求。 表1 系统水平测距实验数据 本文设计了一种基于单片机的超声倒车防撞系统,该系统硬件电路简单、测距精度高。不同于常见的雷达只能探测水平方向,此系统还能探测地面及空中的障碍物。当有障碍物出现的时候,系统不仅能通过显示屏显示车距障碍物的距离,还能提示障碍物的大致方位及类型,可以有效辅助司机倒车,避免擦顶及陷进沟壑等情况的发生。此系统十分适合于大型车辆使用,具有一定的研究与应用价值。5 实验测试
6 结 论
