仿昆扑翼微飞行器电磁驱动电路设计与制造*
2019-12-20吴彬彬张卫平王晨阳
吴彬彬, 张卫平, 邹 阳, 王晨阳, 孙 浩, 陈 畅
(微米/纳米加工技术重点实验室 薄膜与微细技术教育部重点实验室上海市北斗导航与位置服务重点实验室 上海交通大学 电子信息与电气工程学院 微纳电子学系,上海 200240)
0 引 言
微型飞行器不管在军用还是民用方面都具有非凡的实用价值,由于其体积微小,可应用于侦查、救灾、环境监测、监控等领域。研究人员通过研究昆虫的飞行机理,设计出了仿昆扑翼微飞行器。除结构设计之外,控制也是设计中非常重要的一部分。
文献[1]设计并制造了一个电磁驱动方式的仿昆扑翼微飞行器,质量为80 mg,翼展(两翼展开时的宽度)3.5 cm。针对该飞行器本文设计了驱动系统,对其成功起飞起到了极其重要的作用。选择电磁驱动因其具有结构简单、响应快、带宽大,最重要的是,整个飞行器能够实现结构紧凑。该飞行器上的电磁驱动器包括钕铁硼磁铁和镀铜线圈,磁铁放在两个四连杆组系统和线圈之间。将驱动器置于机器人胸部的中间,更接近真实昆虫的扑翼机制。
本文设计的电磁驱动系统,由电源模块供电,由信号发生器提供电压控制信号,该电路能够驱动仿昆扑翼微飞行器扑动双翼,翅膀拍打频率高达80 Hz,拍打幅度约±70°。
设计的电磁驱动电路为该微飞行器的驱动器提供交流驱动信号。当驱动电流通过线圈,线圈产生交变磁场,从而使电磁驱动系统上下往复运动。该电路可分为三个模块,电磁驱动模块、电源模块和信号模块。电磁驱动模块输出两路驱动电流,可以分别控制微飞行器的双翼。电源模块为电磁驱动模块提供±15 V直流电压,通过电池组和升压(BOOST)电路实现。信号模块是一个基于STM32F103RB的最小系统板,编写相应程序并烧写,可以输出一定波形,并可在上位机端实现在线实时控制输出信号的幅值和频率,但因功率过小未直接作为电磁驱动电路的电压控制信号源。
1 电磁驱动模块
在微型机器人应用中,需要较高的驱动电压来完成腿部或翅膀的动作。基于此,迫切需要一种能够产生高驱动电压的驱动电路,同时要具备微型机器人应用中所需满足的性能,比如驱动电流稳定、安全、可靠性好等。针对现有技术[2~5]的缺陷,最终选择高频电磁驱动器[3,4]作为该飞行器的驱动系统。
将两个相同的电磁驱动电路通过共用VCC和VEE实现一个双路电磁驱动电路,如图1所示,其作用是控制电源的通断,从而控制整个电路的工作状态。两个双刀单掷开关分别独立控制两路电磁驱动电路。

图1 双路电磁驱动电路
在运算放大器OPA548T限流控制接口Ilim与负电压之间接一个限流电阻器Rc1,则该器件的最大输出电流为
(1)
式中Rcl阻值为4 kΩ。
这个电路的目的是让输出的驱动电流,即通过电磁线圈的电流与输入电压波形一致(频率,相位等)。输出电流Iout与输入电压幅值Uin满足Uin=Iout×R2。
电磁线圈作为负载,连接在运算放大器OPA548T的输出端。将电源接入OPA548T运算放大器,并在输入端施加电压控制信号,经过OPA548T后,输出一个稳定的驱动电流。另外,通过控制输入电压信号的波形,可以控制电磁线圈的运动位移,从而控制扑翼动作。
2 电源模块
驱动电路模块的正常工作需要±15 V直流电压供电,由于15 V的电池一般体积大、质量大,不适用于微型飞行器,因此,可将若干个电池通过一个升压电路进行升压,这样可以大幅减小该电源模块的质量和体积。
DC-DC的转换方式[6]有多种,基于XL6009搭建一个简单的BOOST电路,如图2所示,启动电压为3 V,该电路能输出具有一定功率的恒定电压,模块效率高、成本低、外围器件少。
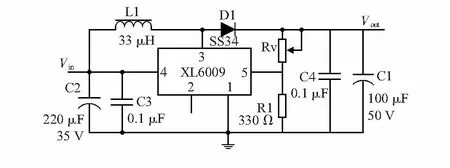
图2 基于XL6009的BOOST升压电路
XL6009的引脚3作为开关,当输出低电平时,二极管D1截止,电感L1作为储能元件储存电压,C1与Rv和R1组成一个回路放电,使输出电压下降;当引脚3输出高电平时,D1导通,L1向C1两端充电,输出电压升高。Rv与R1作为负反馈稳定输出电压,并能控制电压放大倍数[7]。C3与C4为高频旁路电容,能有效滤除高频噪声。
输出直流电压的功率要求达到6 W左右,而BOOST升压电路的升压效率为90 %左右,因此,对于微小电池的选择也有限制。该电路的输出电压为Vout=1.25(RV/R1+1),为了得到15 V的输出电压,可由该式选择R1和RV的大小。
为了得到±15 V电压,需要两个这样的升压电路和两组电池,具体实现方式如图3所示。
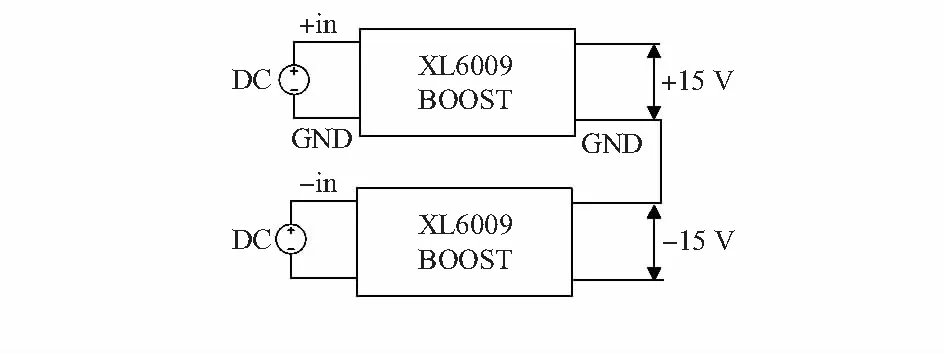
图3 ±15 V电压产生电路
调节两个升压模块的电位器,使得空载时输出电压大小为15 V,然后将这两个模块按照图3所示进行连接,并在两个模块输出端分别接上30 Ω负载,测试得U1=14.4 V,I1=0.45 A,U2=14.53 V,I2=0.48 A,因此功率大小为P1=6.48 W,P2=6.97 W。可根据负载大小及所需功率调整电池型号和数量,只要保证足够的功率和最大输出电流,就可以在输出端得到稳定的、具有一定功率的±15 V电压。
将该升压模块应用到电磁驱动电路上,测得输出端的驱动波形如图4(a)所示,再将这两个模块一起应用到微飞行器上,电压控制信号为50 Hz/0.5Vpp的正弦信号,由信号发生器产生,飞行器同样能够扑动双翼,如图4(b)所示。
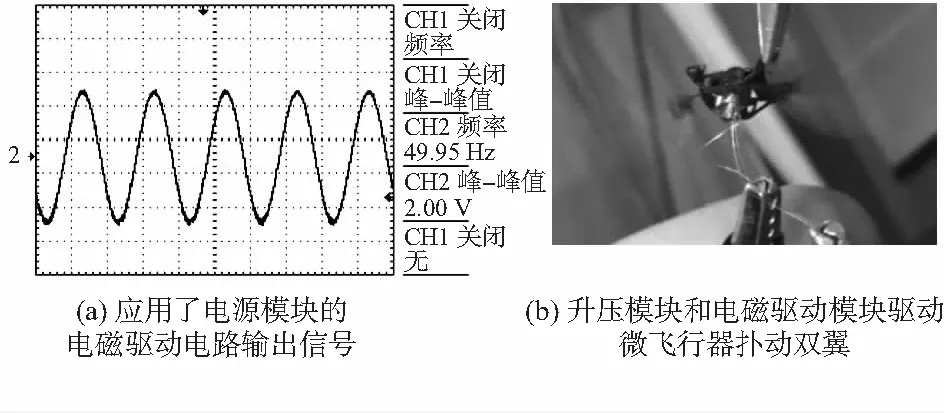
图4 升压模块应用结果
3 信号模块
电磁驱动电路所需的电压控制信号可由最小系统板产生,利用芯片STM32F103RB设计并绘制所需的外围电路。实验者可在上位机端发送相应指令,从而实现在线实时控制输出信号的频率和幅值。若要实现无线控制,可以将有线串口模块换为无线串口模块。
3.1 最小系统板电路与工作原理
本文研制的最小系统板采用STM32F103RB芯片,利用内部通用定时器TIMx产生两路脉宽调制(pulse width modulation,PWM)输出,接着经过两级的RC滤波和运算放大器,输出两路信号。
实际电路中典型的PWM波高低电平分别为VH和VL,理想情况下VL为0。可以用分段函数表示为
(2)
式中T为计数脉冲的基本周期,N为PWM 1个周期的计数脉冲个数,n为PWM 1个周期中高电平的计数脉冲个数,k为谐波次数,t为时间。式(2)傅里叶级数展开,有
f(t)=VDC+VHC+VHO
(3)
式中VDC为直流分量,VDC=(n/N)(VH-VL),VHC为1次谐波分量,VHO为大于1次的高次谐波分量。
直流分量VDC与n呈线性关系,并随着n从0~N变化,直流分量从VL~(VH-VL)之间变化,即所需的输出电压。因此,只要将式(3)中除了直流分量VDC以外的高次谐波过滤掉,则可以完成PWM波到电压的数/模转换(digital to anolog conversion,DAC),即PWM波可以通过一个低通滤波器进行解调。
PWM到DAC电压输出的电路实现如图5所示,R与C的具体参数可以根据式(3)中VHC的1次谐波频率来选择,因为若能将1次谐波很好地过滤,则基本不存在高次谐波。

图5 RC低通滤波电路
综上所述,STM32最小系统板从只读存储器(read only memory,ROM)中获得波形信息,根据表中的数值产生占空比以正弦规律变化的PWM,最后经过低通滤波器滤除高次谐波,最终产生正弦波。
最小系统板和上位机通过串口进行通信,在确定通信规则后,就可以在上位机端通过发送指令的方式对输出信号的幅值和频率进行控制。若安装无线串口模块,就可以实现无线控制。
最后,将这个信号模块输出的驱动信号作为电压控制信号,加到前面设计的电磁驱动模块上,用电源模块作为供电源,测试输出端信号,结果发现波形发生畸变,未得到正确输出,经过研究,信号模块虽然能输出想要的波形,并能在线实时控制幅值和频率,但功率达不到要求。
3.2 劈裂信号的产生与控制
3.2.1 劈裂信号的产生
劈裂信号为
(4)

将一个劈裂信号周期分为128个点,ω取2π/128,δ分别取π/150和-π/150,那么分别计算得σ1=π/22,ξ1= - 64π/11,σ2= -π/278,ξ2=64π/139,以这两组参数建立两个劈裂信号式(5)、式(6),其中x为1~127的整数
(5)
(6)
将得到的两个劈裂信号波形表分别存入最小系统板的ROM中,然后在板子输出端用示波器观察,结果如图6。

图6 δ=±π/150时的劈裂信号波形
因此,保持劈裂信号总频率不变,改变δ的值就可改变波形形状,而且δ的正负决定了波形“倾斜”的方向,值的大小影响“倾斜”的程度。
3.2.2 劈裂信号幅值的控制
以式(5)的波形为例,在上位机端通过串口在线实时改变波形幅值。保持一路波形幅值稳定不变,改变另一路的幅值,分别为1,1.8,2.5,3 V,改变过程如图7所示。
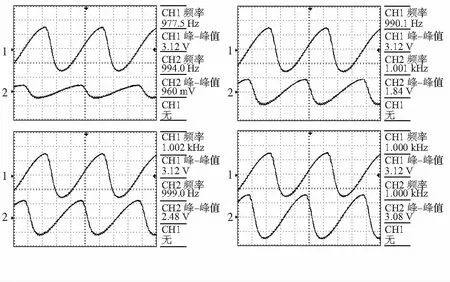
图7 劈裂信号幅值的改变
3.2.3 劈裂信号总频率控制
同样以式(5)的波形为例,在上位机端通过串口改变频率,保持一路波形总频率稳定不变,改变另一路的总频率,分别为280,350,800,1 000 Hz,如图8所示。

图8 劈裂信号频率的改变
4 实验结果
在实际电路中,图1中的R2用4个并联的10 Ω电阻器替换,电磁线圈用10 Ω电阻器代替,测试电磁线圈两端的电压波形。根据Uin,输出电流Iout为600 mA,所以,电磁线圈两端电压为6 V,测得的输出电压信号的峰峰值应约为12 V。通过控制双刀单掷开关,先让一路单独工作。如图9(a)所示,上方波形为函数发生器输出信号,峰峰值设置为3Vpp,下方波形为测得的输出电压信号,可见峰峰值为12 V左右。控制开关使两路同时工作,函数发生器输出的信号如图9(b)所示,两个信号峰峰值均为3 V左右,图9(c)为测得的两路输出信号,可见峰峰值均为12 V左右,但波形有畸变,这是功率过大引起的,增大电源功率可解决这个问题。

图9 输出信号
综上可见,两路电磁驱动电路相互独立,仅仅共用电源,可通过开关进行控制,只要适当提高电源功率,就可以各自输出稳定的驱动电流。
将该电磁驱动电路连接在文献[1]的仿昆微飞行器上,即飞行器上的电磁线圈接入到该电路的输出端,利用外部电源和激励信号,该微飞行器的双翼扑动,如图10所示。

图10 微飞行器驱动结果
5 结束语
本文设计了一个电磁驱动电路,利用电源模块供电,用信号发生器提供电压控制信号,输出的驱动电流用于驱动扑翼微飞行器上的电磁线圈,交变电流通过电磁线圈产生交变的电磁力,进而驱动永磁体做往复运动,然后经过四连杆传动机构使得微飞行器产生一些特定的扑翼动作。信号模块通过改变ROM中存储的波形数据可以产生相应波形,并能通过上位机发送的指令在线实时改变输出波形的频率、相位与幅值,但由于输出功率有限,还不能应用在该电磁驱动电路上。
该电路系统目前还存在一定的不足,比如微小化还未实现,升压模块所需的电池组质量和体积不够小,串口工具发送指令后,波形的改变需要反应时间,最小系统板输出的信号功率有待提高等,所以还存在一定的研究发展空间。
