新型磁流变智能隔振系统实验研究
2019-12-20冷鼎鑫孙松磊巩少峰刘贵杰谢迎春
冷鼎鑫,孙松磊,巩少峰,刘贵杰,谢迎春,徐 凯
(1.中国海洋大学 工程学院,山东 青岛 266100;2.中国船舶重工集团公司 第七一三研究所,郑州 450015;3.河南省水下智能装备重点实验室,郑州 450015)
0 引 言
在实际工程应用中(如:汽车、工程机械、航行器运载系统等),振动现象十分普遍。有害振动易引起材料及结构的疲劳损伤,影响其使用寿命,由其衍生的噪声污染会对人身健康和生活环境造成不良影响。因此,需采取适当的措施减小有害振动的危害。目前,常用的结构振动控制技术,可分为:被动控制、主动控制及半主动控制[1]。传统的被动控制技术,其结构设计参数固定,仅能对固定幅值及频率的外界激励有效,缺乏自适应性[2]。与被动控制技术相比,主动控制技术可实时跟踪外载荷激励特性及结构自身振动特性,输出最优控制力,抑制结构振动。主动控制需要大量的外加能源提供所需控制力,在极端情况下抑振效果不佳[3]。半主动控制集合了被动控制与主动控制的优点,仅需要较小的能量便能够实现振动系统的参数控制技术,达到有效减振的目的[4]。
随着材料科学的发展,基于智能材料的半主动控制技术受到越来越多的关注。磁流变弹性体作为智能材料的新成员,具有响应迅速、稳定性好、力学性能可调、可控等优点,在诸多工程领域展现了良好的应用前景[5-8]。对磁流变弹性体的研究,最早可追溯到1995年,Shiga等[9]利用铁磁微粒和硅橡胶制备了微米级颗粒增强磁流变智能橡胶,发现其弹性模量在外加磁场作用下与零场相比,增加了2.4倍。国内外研究机构对磁流变减振隔振技术开展了深入的研究。近年来已有大量关于磁流变弹性体材料制备、器件设计、智能减振隔振系统开发的研究[10-12],目前还没有形成统一的实验测试标准能够对磁流变智能隔振系统的力学特性进行完整描述,因而影响其工程应用进程。
本文以新型磁流变弹性体智能隔振系统为研究对象,对其振动力学特性及磁致动力学特性的实验测试开展研究。设计了一套磁流变智能隔振系统固有振动特性的实验测试平台,研究其宽频移频特性,并实验测试了该智能隔振系统的隔振力学性能。对磁流变智能隔振系统的动力学特性进行测试,评估其幅值相关、频率相关及磁致动力学特性。建立了一种基于BP神经网络的动力学模型,描述了其动态力学行为,与实验结果相比,具有良好的预测精度。本文概述了新型磁流变智能隔振系统的减隔振效果。本研究为磁流变智能隔振系统的实验测试系统开发提供参考依据,研究成果可设计制造一体化技术、实验测试技术、数据处理与分析技术等方面提供本科教学和大学生科研创新训练的素材,较好地应用于实践教学。
1 磁流变智能隔振系统的隔振特性实验
1.1 固有振动特性实验
本文对磁流变智能隔振系统[13]的磁致固有振动特性进行了实验测试,提出了一套基于共振相位判别法的实验装置。该装置通过速度相位判别法,确定不同电流下磁流变弹性体隔振系统的固有频率。实验模型测试系统包括激励系统、传感系统、数据采集系统、计算机存储系统及信号分析系统。激励系统信号源采用激振器。传感系统主要包括加速度传感器及电荷放大器等。加速度传感器分别置于磁流变弹性体隔振器的上、下两个平面上,用于测量实验过程中器件的加速度响应信号。在测试过程中,激振器的频率控制在1~1 000 Hz。直流电源连接磁流变弹性体隔振器,通过适时改变直流电流调节磁场强弱。实验测试系统的基本原理图,如图1所示。
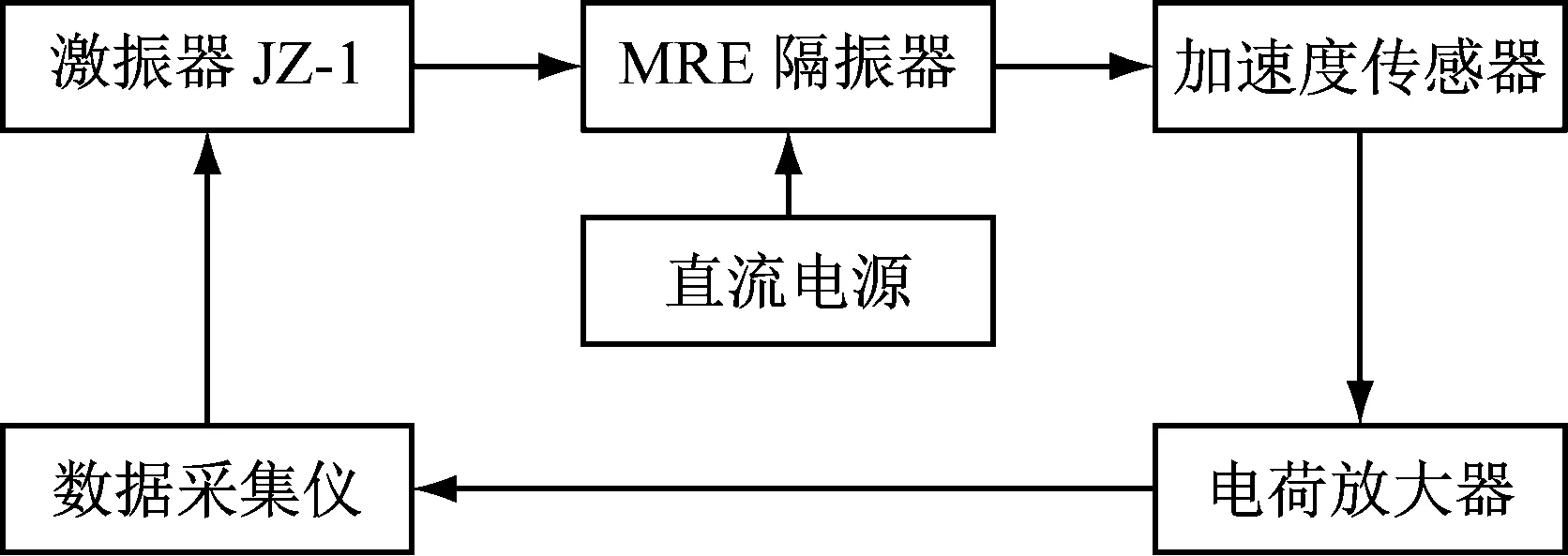
图1 实验测试系统装置的基本原理图
本文在测试磁流变弹性体隔振器的固有频率时,采用简谐力作为外部激励;为获取准确的固有频率,采用相位判别法来判别固有振动频率。常用的相位判别法包括:位移判别共振法、速度判别共振法、加速度判别共振法。根据实验装置的测试精度,本文采用速度判别共振法来确定磁流变弹性体隔振器的固有频率。
在实验测量中,将速度信号接入到示波器Y轴(2通道),加速度测得的振动信号接入到示波器X轴(1通道);当X轴与Y轴测得的信号差为零时,系统发生共振,记录此时的频率为磁流变弹性智能隔振系统的固有振动频率。实验过程中通过调节采集仪控制激振器进行扫频。通过改变直流电源的输出电流,测试不同电流强度下磁流变弹性体隔振器的固有频率,如表1所示。
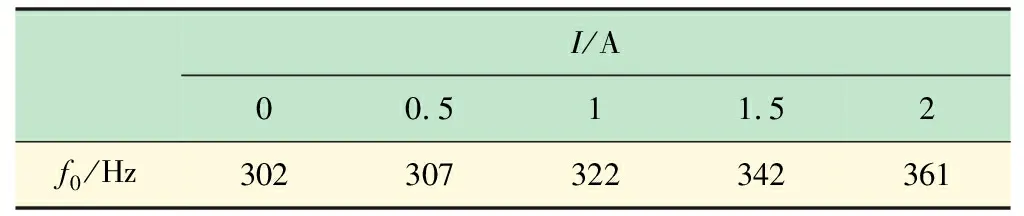
表1 不同电流下的固有频率
由表1可见,当电流I从0 A增加到2 A时,磁流变弹性体智能隔振器的固有频率由302 Hz增加至362 Hz,磁致移频范围可达20%,这说明磁流变弹性体隔振器具有良好的磁致宽频移频特性。磁流变弹性体智能隔振器在振动控制领域具有良好的应用前景。
本文在研究磁流变弹性体智能隔振系统磁致移频特性的基础上,进一步开展了磁致隔振性能的实验测试。
1.2 隔振性能实验及结果分析
对磁流变弹性体隔振器固有频率实验测试系统进行改进,建立了隔振性能测试平台,如图2所示。激振源为偏心电机,将其安置于磁流变弹性体隔振器的顶部作为质量块和外部载荷,通过调节偏心电机的转速,实现不同频率的激振载荷。磁流变弹性体隔振器固定于基座上。两个加速度传感器分别安装于隔振器的上、下平面,用于采集加速度信号。测试的加速度信号经放大后传递给数据采集仪和计算机系统,进行数据分析与处理。直流电源直接与磁流变弹性体隔振器相连,通过调节输入电流I的大小,实现不同磁场强度的输入。
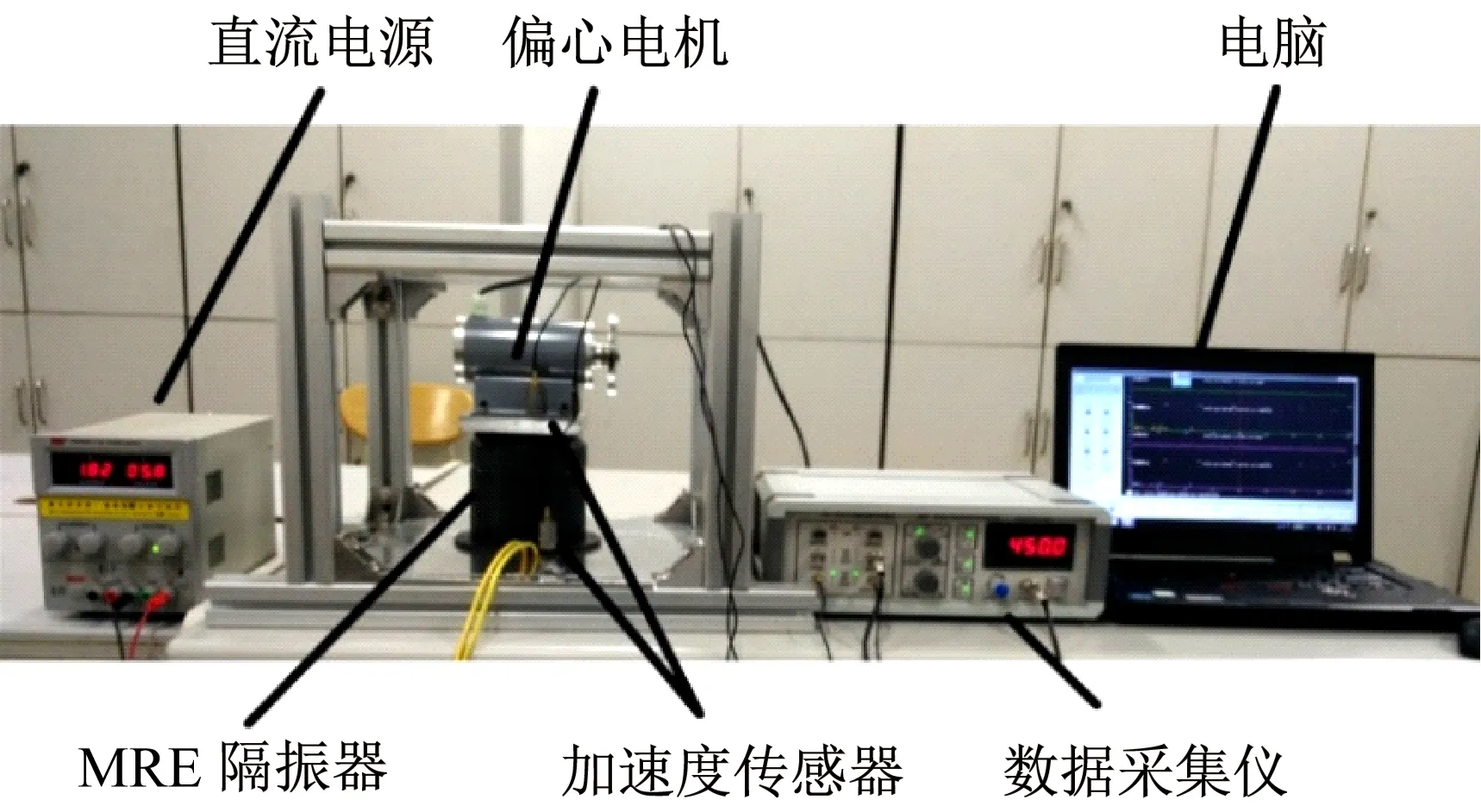
图2 磁流变弹性体隔振器的隔振测试平台

根据实验测试结果,磁流变弹性体隔振器在不同电流I输入下的隔振效果,列于表2中。
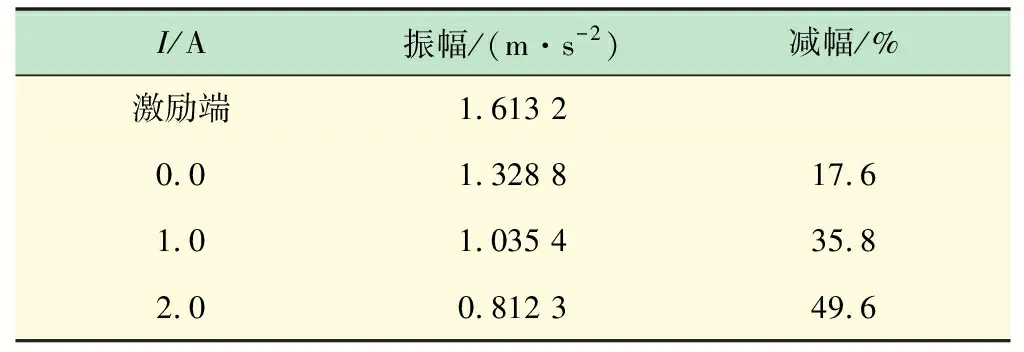
表2 隔振前后数据对比
由表2可知,磁流变弹性体隔振器的隔振效果随着输入电流I的增大而增强。当输入电流I为0.0 A 时,隔振效果为17.6%;当输入电流I增加至2.0 A 时,隔振效果增加至49.6%。与零场相比,最大场强下的隔振效果增加约2.8倍。此外,加速度响应的幅值由零场时的1.613 2 m/s2降低到最大电流时的0.812 3 m/s2。可见,磁流变弹性体隔振器在外加场强下具有智能隔振效果,随着外加场强增加,其减幅效果愈加明显。
2 磁流变智能隔振系统的动态力学实验
除了对磁流变弹性体隔振器的固有振动特性及磁致隔振特性进行实验研究外,本文还对其磁致动态力学性能进行了实验测试,并建立了一种基于BP神经网络的动力学模型。
2.1 实验测试方案
本文采用MTS弹性体测试系统对磁流变弹性体隔振器进行动态力学测试。MTS 831.50系统可对实验对象进行0.01~1 000 Hz范围内的激励振动。该测试系统的力学传感器集成于测试装置中,可确保测试数据的准确性。磁流变弹性体隔振器动力学测试的实验系统,如图3所示。
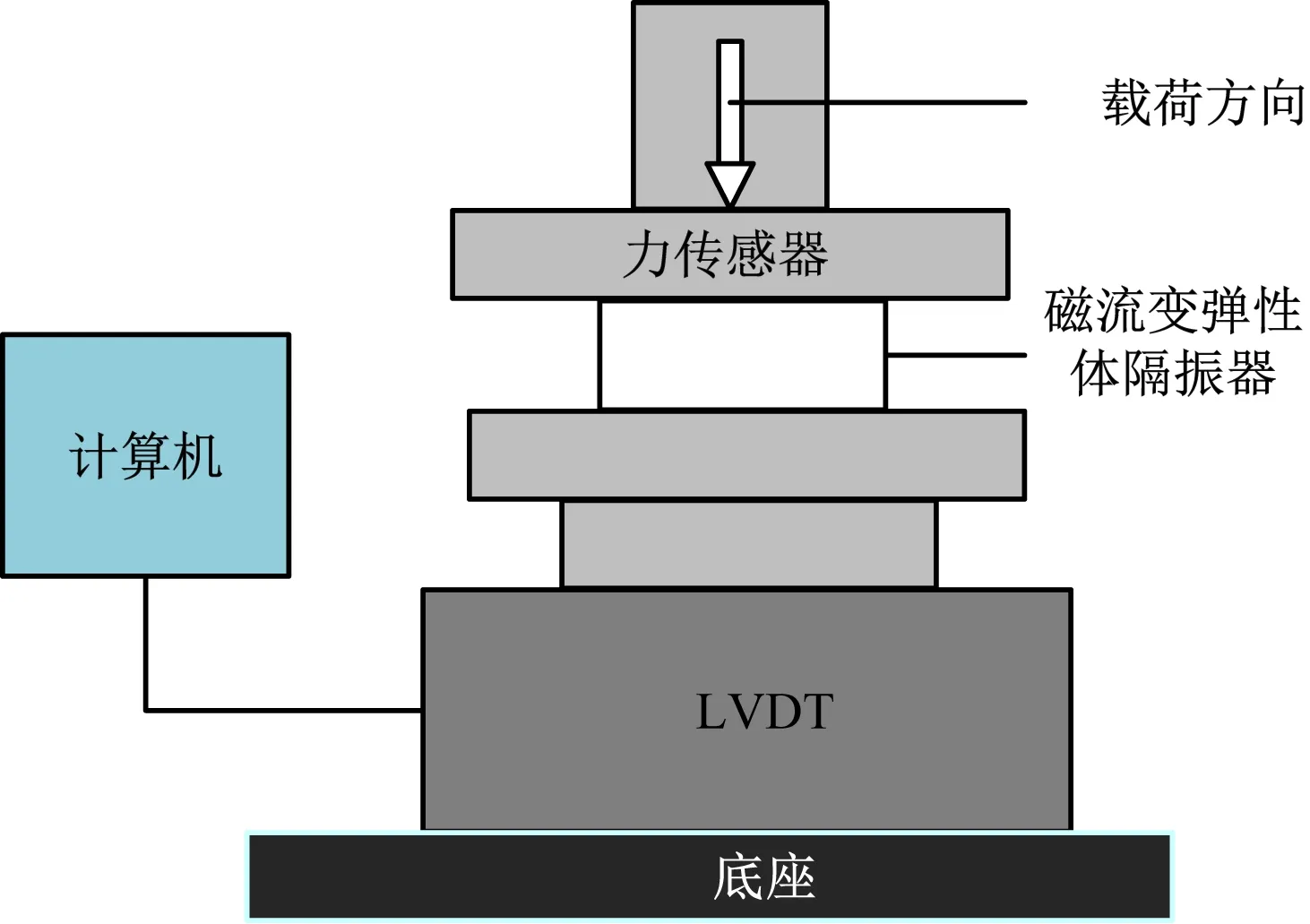
图3 动态测试系统
磁流变弹性体隔振器动力学测试的实验方案见表3,其中包含2种位移(±0.05,±0.15)mm;3种频率(0.5,5,15)Hz;3种电流强度(0.0,1.0,2.0)A。
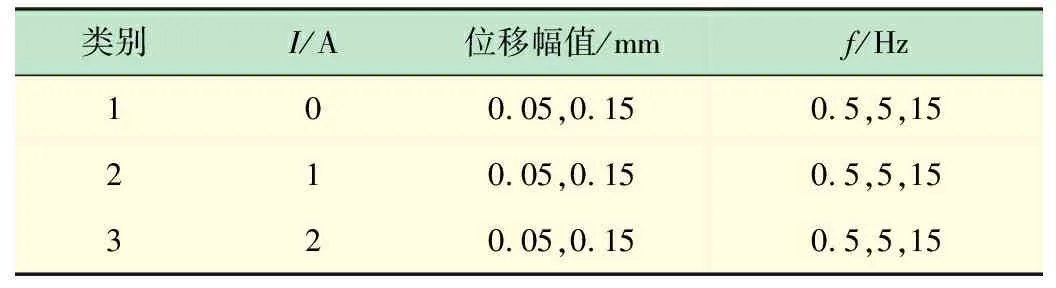
表3 实验测试方案
2.2 基于BP神经网络的动力学数值建模
反向传播(Back propagation,BP)神经网络是一种多层的前馈神经网络,该网络的主要特点是信号向前传递、误差反向传播[15]。当信号向前传递的这个过程中,输入的信号将会从输入层经过隐含层逐层进行处理直至输出层。在信号传递过程中,每层神经元的状态仅仅影响下一层神经元状态,不相互连接的两层之间不会发生信号的干涉。如果输出层未达到期望输出,则转入反向传递,根据预测误差调整网络权值和阈值,使BP神经网络的预测输出结果进一步向期望输出结果逼近。
本文用于预测磁流变弹性体动力学性能的BP神经网络拓扑结构,如图4所示。其中:x(输入位移)、F(t-1)(前一时刻动态力)、I(电流)、v(速度)、F(该时刻动态力)构成了BP神经网络的输入层;O为该网络的输出层(即预测值);ωij和ωjk为BP神经网络的权值。从图4可以看出,BP神经网络是一个高度非线性函数,该网络的输入值和预测值分别为函数的自变量和因变量。本文采用的BP神经网络结构输入层总节点数为5、输出层总节点为1。因此,该BP神经网络表达了一个从5个自变量到1个因变量的函数映射关系。
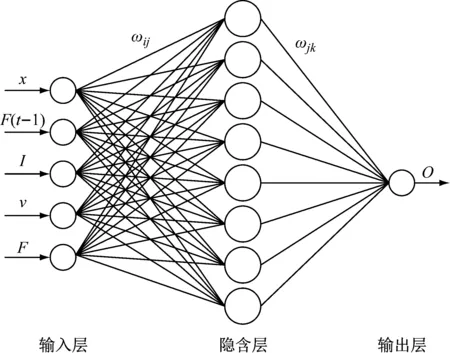
图4 BP神经网络拓扑结构图
BP神经网络预测前需要训练网络,通过训练使网络具有联想记忆力和预测能力。BP神经网络的训练过程主要可以归纳为包括以下几个步骤:
步骤1网络初始化。根据系统输入、输出序列确定根据输入层及输出层参数的总个数。本文确定的BP神经网络输入层为5个节点,分别为:位移、前一时刻的动态力、电流、速度及当前时刻动态力。隐含层为8个节点,输出层为一个节点。初始化输入层、隐含层和输出层神经元之间的连接权值ωij和ωjk。初始化隐含层阈值a及输出层阈值b,给定学习速率和神经元激励函数。
步骤2隐含层输出计算。根据输入层变量、输入层与隐含层之间的连接权值以及隐含层阈值,计算隐含层的输出值H,
(1)
f为隐含层激励函数,
(2)
步骤3输出层输出计算。根据隐含层输出H,连接权值ωjk和阈值b,计算BP神经网络预测输出O,
(3)
步骤4误差计算。根据网络预测输出O和期望输出YF,计算网络结构的预测误差e。
步骤5权值更新。根据网络预测误差e更新网络连接权值
(4)
ωjk=ωjk+ηHjek;i=1,2,…,5;j=1,2…,8
(5)
步骤6阈值更新。根据网络预测误差e更新网络节点阈值。
步骤7判断算法迭代是否结束,若没有结束,则返回步骤2。
BP神经网络的算法流程图,如图5所示。
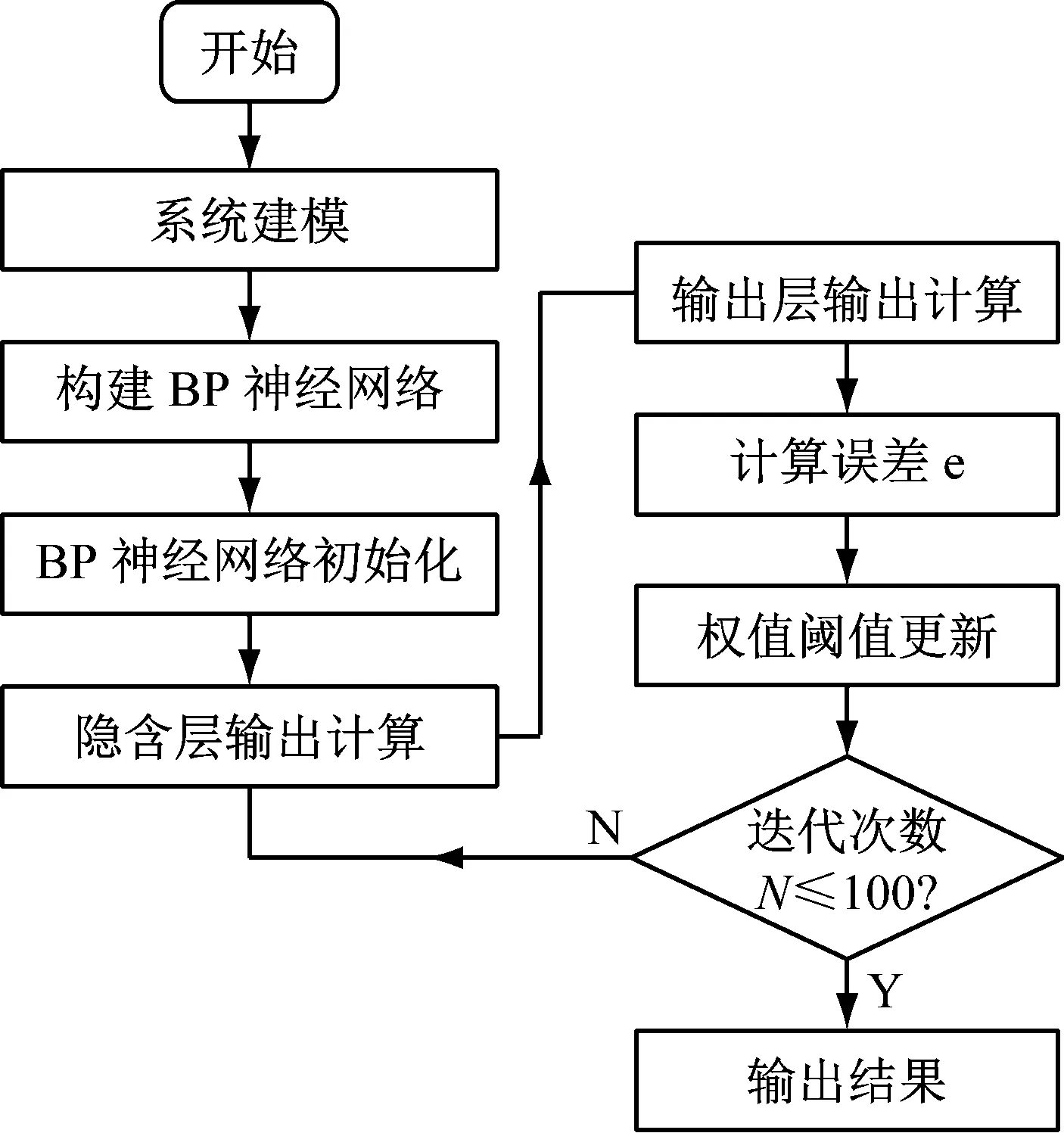
图5 BP神经网络的算法流程图
2.3 实验结果与数值结果分析
根据实验测试结果及动力学建模研究,分析磁流变弹性体智能隔振器的动力学特性,评估动力学模型的预测精度。
图6(a)显示了不同激振幅值(0.05 mm及0.15 mm)对隔振系统动力学特性的影响,图6(a)的实验测试工况为0.5 Hz激励,施加电流强度为2.0 A;图6(b)的实验工况为15 Hz激励,施加电流强度为1.0 A。
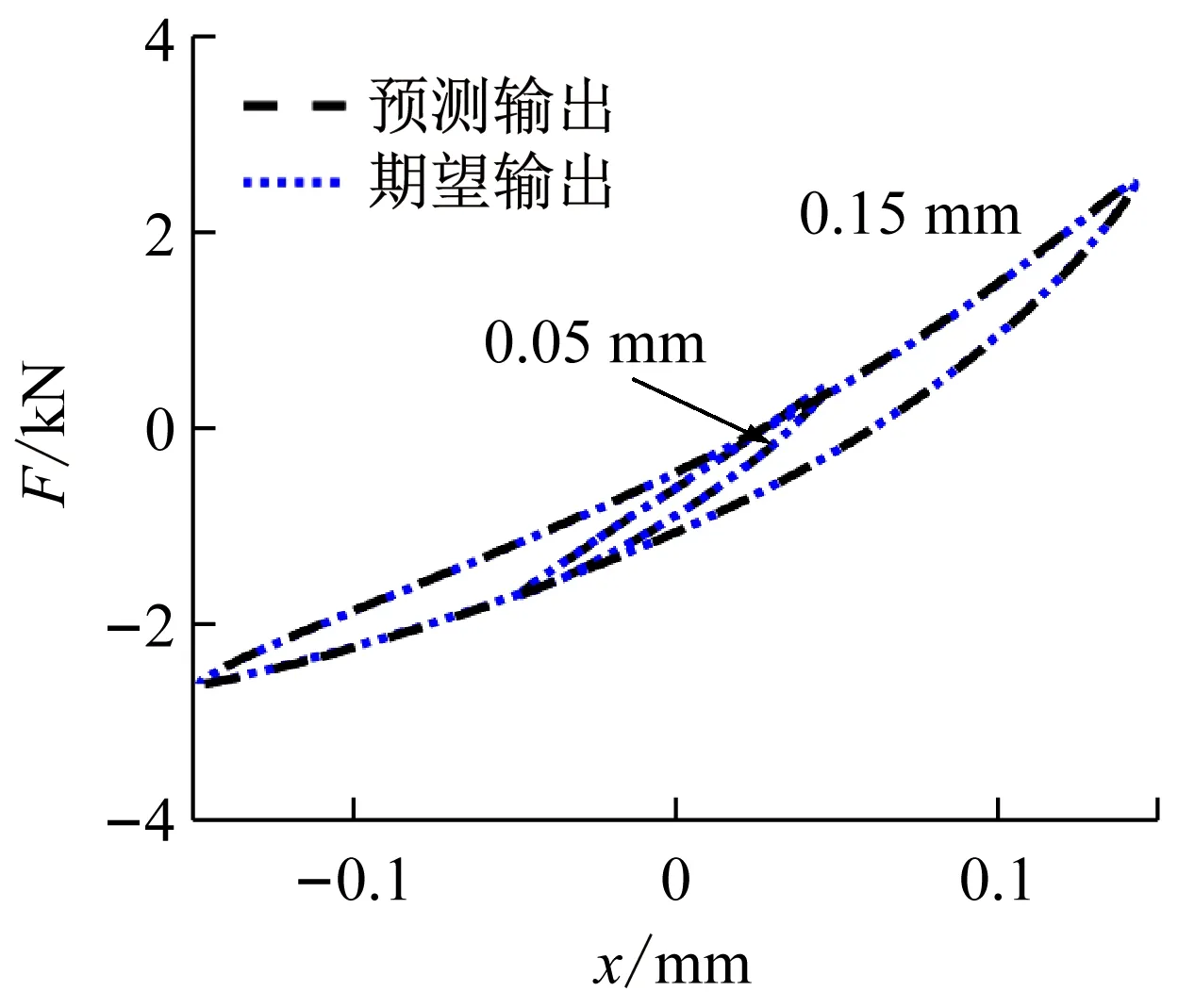
(a)I=2.0 A,f=0.5 Hz
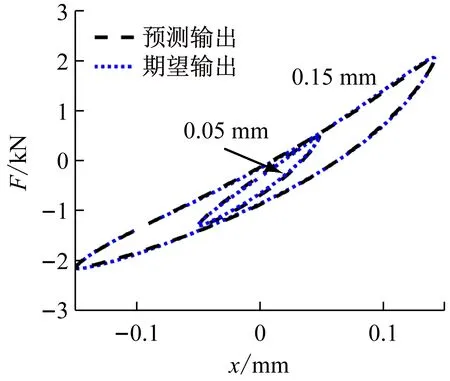
(b)I=1.5 A,f=15 Hz
由图6可以得出:磁流变弹性体智能隔振器在不同振幅下的力-位移曲线均为光滑的“类椭圆”曲线;“类椭圆”的斜率随着激励振幅的增加略有减小,但其面积随着激励振幅的增加而增大,该现象与磁流变弹性体材料的Payne效应有关。对比图6(a)、(b)可知,基于BP神经网络的动力学建模可以较好地预测磁流变弹性体隔振器在不同振幅激励下的动力学行为。
图7显示了不同激振频率(0.5 Hz、15 Hz)对隔振器动力学特性的影响。图7(a)实验测试工况为0.05 mm激励振幅,施加电流强度为2.0 A;图7(b)实验工况为0.15 mm激励振幅,施加电流强度为2.0 A。
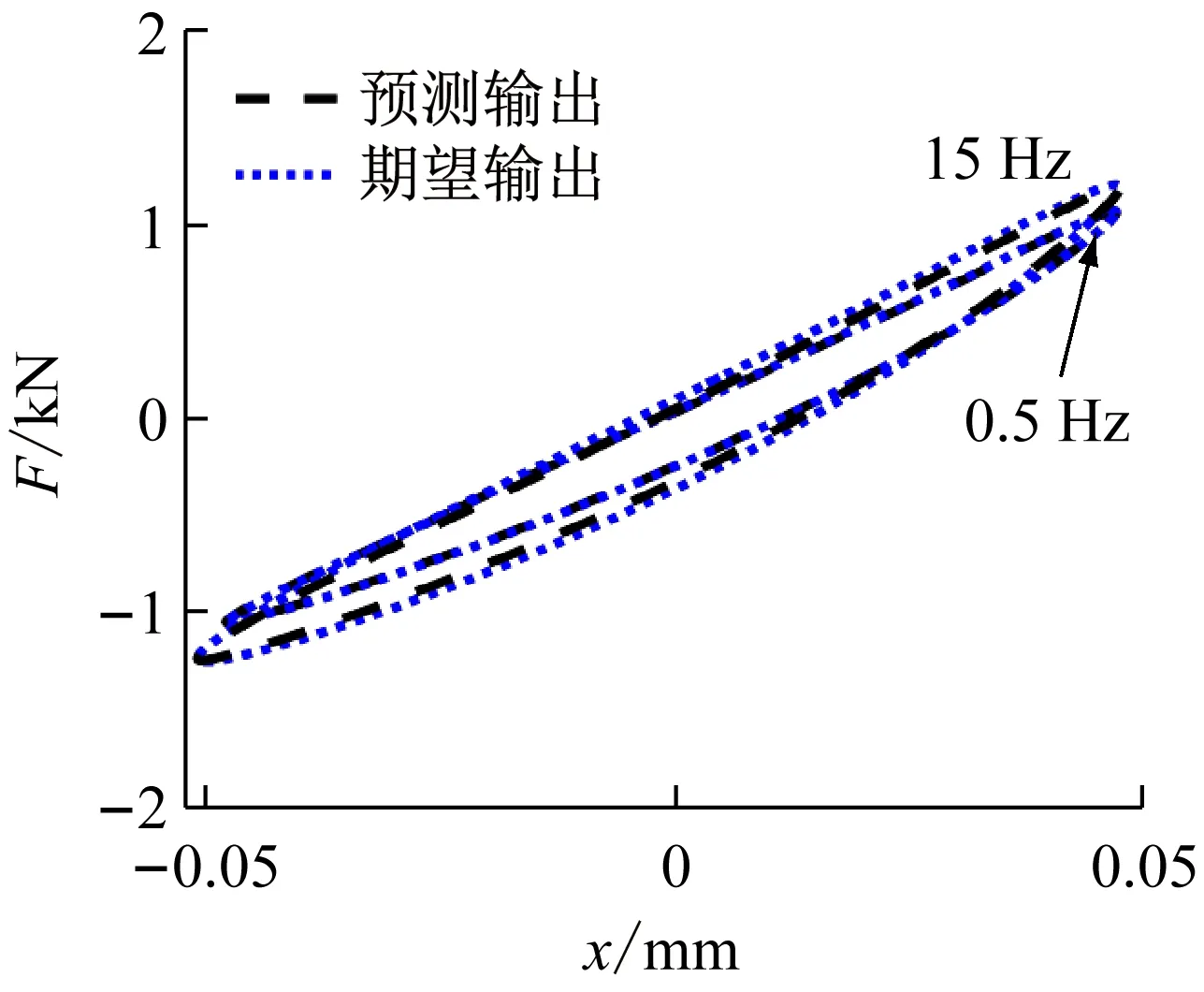
(a)I=2.0 A,A=0.05 mm
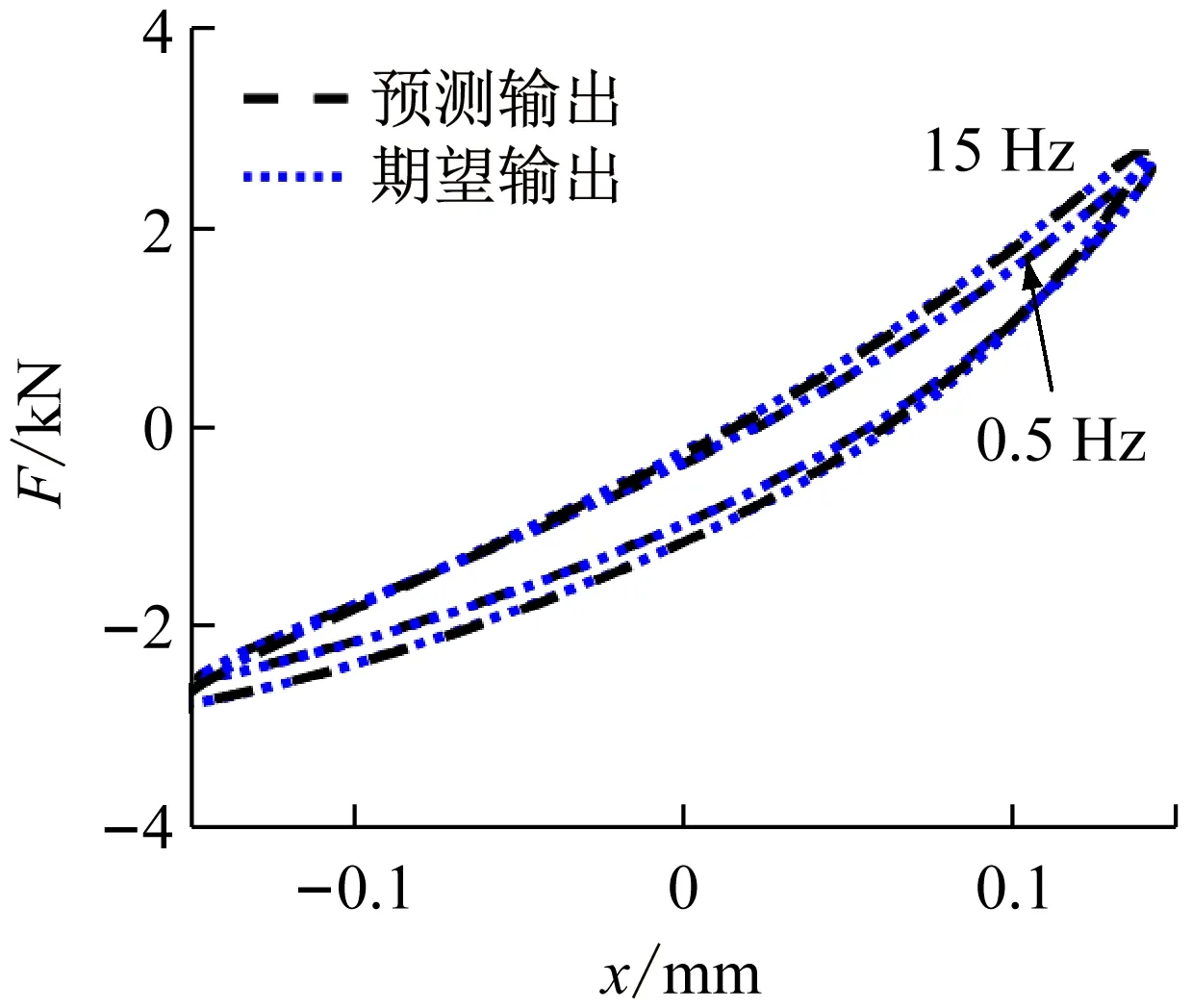
(b)I=2.0 A,A=0.15 mm
从图7可以看出:激励频率对磁流变弹性体隔振器力学特性影响不大,对其整体磁滞曲线包围的面积也影响很小。在固定激励位移及外场强度下,磁流变弹性体隔振器磁滞曲线的等效刚度随激励频率的增加略有增大。此外,对比图7(a)、(b)可知:基于BP神经网络的动力学建模预测结果与实验结果吻合度较高,该模型可较好地不同振幅频率下磁流变弹性体隔振器的动力学特性。
图8显示了不同外场电流(0.0 A,1.0 A,2.0 A)对隔振器动力学特性的影响。图8(a)所示的实验测试工况为0.05 mm激励振幅,0.5 Hz激励频率;图8(b)实验工况为0.15 mm激励振幅,5 Hz激励频率。
根据图8可以看出:随着外场强度的增加,磁流变弹性体隔振器的等效刚度具有显著的增大,这是由于磁流变弹性体材料的磁致模量随着外加电流强度的增加而增大。与此同时,由于磁流变弹性体的磁致效应,磁流变弹性体隔振器磁滞回线所围成的面积也随着外加电流的增加而增大。此外,对于图8(a)、(b)可以看出,基于BP神经网络预测的动力学特性结果与实验测量结果拟合度较好,即该模型可预测不同外加场强下磁流变弹性体隔振器的动力学特性。
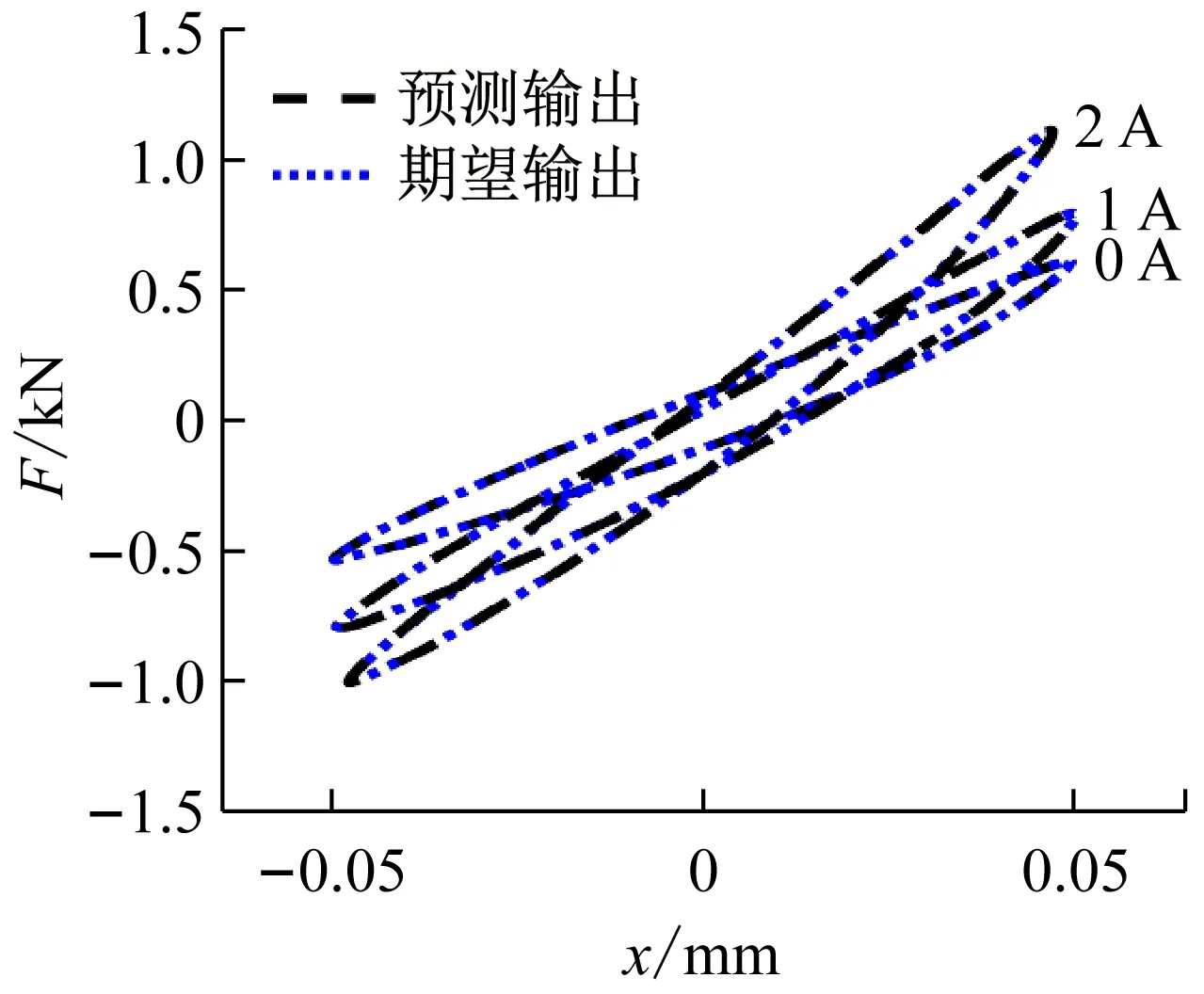
(a)f=0.5 Hz,A=0.05 mm
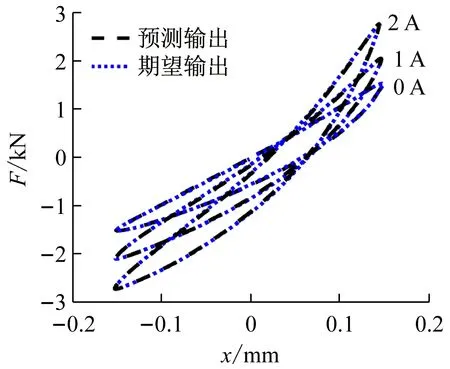
(b)f=5 Hz,A=0.15 mm
3 结 语
本文针对新型磁流变弹性体智能隔振系统,通过实验测试与仿真分析相结合,研究其宽频移频特性、磁致隔振特性及磁致动态力学特性,并通过建立一种基于BP神经网络的动力学模型,描述其磁致动力学行为。结果表明:新型磁流变智能隔振系统具有良好的减/隔振效果。本文的研究工作可为实验测试、数据处理与分析、设计制造一体化技术等方面提供本科教学、研究生教学案例,拓宽现有实践教学范围。
