重要电力设施防止外来无人机管控系统研究
2019-12-19方鹏张晨波张振陆德琳
方鹏 张晨波 张振 陆德琳
摘 要:文章首先分析了当前我国无人机监管的现状以及管控的必要性,然后介绍了现有的无人机监测与反制方法,通过对比分析得出管控方案。无人机管控系统分为指控分系统、探测分系统、处置分系统、通信分系统,各个系统采用分布式组网架构,起到良好的防护作用。
关键词:电网;无人机;管控系统
中图分类号:V355 文献标志码:A 文章编号:2095-2945(2019)35-0041-04
Abstract: This paper first analyzes the current situation of UAV supervision in China and the necessity of UAV control, then introduces the existing UAV monitoring and control methods, and obtains the management and control scheme through comparative analysis. UAV management and control system is divided into command and control subsystem, detection subsystem, disposal subsystem, communication subsystem. Each system adopts distributed networking architecture, which plays a good role in protection.
Keywords: power grid; UAV; management and control system
引言
無人机是一种特殊的航空器,在中国民用航空局制定的《轻小无人机运行规定(试行)》[1]中,无人机被定义为“一架由遥控站管理(包括远程操纵或自主飞行)的航空器,也称遥控驾驶航空器”。随着科技的发展和社会经济的不断进步,民用无人机逐步进入人们日常生活,并在遥感、测绘、防灾减灾等工作中发挥出重要作用[2]。近年来无人机非法闯入的新闻事件出现爆发式增长,电力设施关系到全面的生活,是民生工程的重要环节,当前随着能源网和互联网的发送,人民的生活已经离不开电力,若电力设施收到破坏,将极大扰乱人民的生活。同时,电力设施是生产环节不可或缺的一部分,对无人机的管控,将极大避免重要电力设施来自空中的威胁,将大大提高现有电力设施的安全防护水平。
1 绪论
1.1 我国无人机监管现状
目前随着无人机的用途越来越广泛,2017年底我国民用无人机市场规模已达500亿,目前无人机每年销量百万台以上,年年递增,无人机给很多行业带来方便的同时也正在威胁着公共设施和重要电力设施的安全。反无人机非法入侵系统已用于大型公司总部防止非法入侵窥测,大型会议公安防止来自空中袭击,敏感宣判会议防止记者偷拍等场所,但针对电力重要设施反无人机非法入侵系统还是空白,尚未有产品面世[3]。
2017年上半年已发生40余起无人机入侵电网造成线路跳闸等重大损失,随着越来越多的国际国内重要会议将在杭州召开,为了保障安全供电,防止无人机的非法入侵,通过在变电站加装无人机低空入侵防范系统,提出经济合理、技术安全的安全解决方案,对保障电网的可靠供电具有重要的现实意义[4]。
1.2 电力行业无人机监管必要性
变电站实行无人值守后,变电运检人员对管辖设备也无有效监视手段,无法实时掌握站内设备状态[5]。特别是火灾、防外破和设备损坏事故无法提前有效预防,同时因无监视手段,运维人员无法预判故障严重程度,需频繁进站检查设备,在运维班和变电站间反复往返,造成人力浪费。进行无人机监管系统体系的设计,能够大大加快变电站无人值守的进程。按照“信息安全第一、功能先进实用、界面统一友好、服务基层一线”的思路优化提升监控平台和完善变电运检管理手段,实现运维班对所辖无人值守站的主辅设备运行信息全面采集、集中监视、状态判断和运检作业全流程管控,切实承担设备主人职责。
1.3 研究目标
目前在变电站的防护设备上仅有视频监控措施,而对于无人机的防护却无措施。本项目的目的是通过在国网变电站内加装低空入侵防范系统,用以提高电网运行环境的可靠性、降低新型技术对电网设备带来的新的安全风险,降低设备故障率,满足相关企业标准和反措要求,保障电网设备的安全运行。
2 无人机管控系统的设计方案
面对无人机带来的各种威胁,除了制订相应的政策法规,还需要强有力的无人机反制技术手段来实现对无人机的有效管控[6]。当前,对无人机的反制主要分为两个阶段:一是对无人机的探测和识别;二是对无人机进行反制,让其迫降、返航或者引导其安全降落。本章从监测和反制角度对现有无人机管控方案进行了梳理,并进行对比分析。
2.1 监测角度下的管控系统方案分析
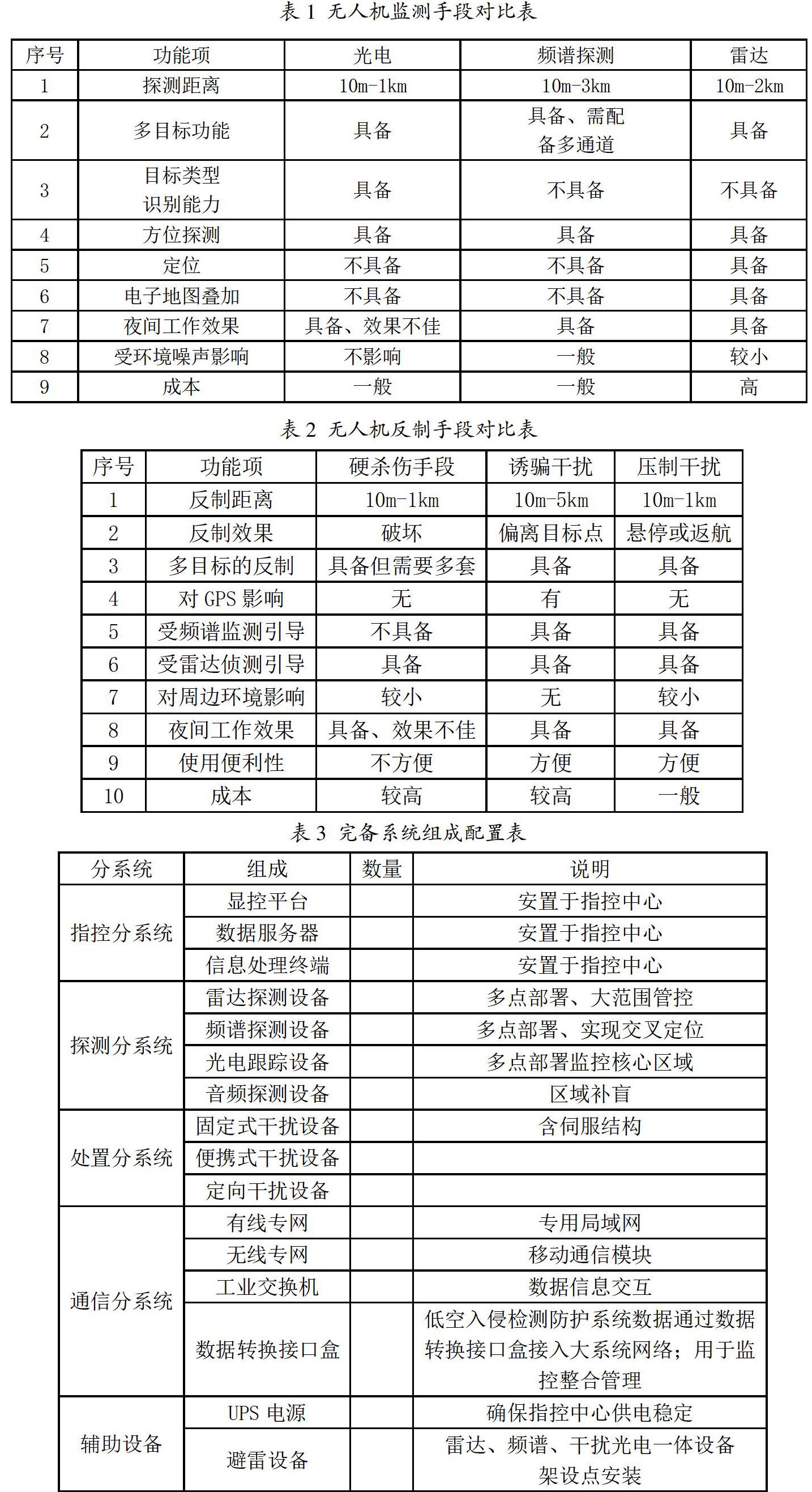
当前常规的监测手段主要有3种:光电、频谱监测、雷达,这三种手段各有优缺点详见表1。
2.1.1 基于光电技术的管控方案分析
无人机搭载光电探测系统可以实现对目标的搜索与跟踪定位[7]。光电跟踪技术是以光学成像和图像识别为核心的探测跟踪技术,利用可见光或目标的热红外反射,采用超视距、高清、透雾的可见光摄像机和红外热成像仪传感器组合来进行无人机探测。光电探测系统采用被动工作模式,即由载荷操作人员选定感兴趣的目标区域,经系统提取目标轮廓,在保持稳定跟踪目标的同时,实时将角度测量数据传回任务控制台。通过光学成像、红外成像、激光红外成像以及热成像技术采集无人机图像进行分析对比,从而判断无人机型号、位置等。
2.1.2 基于频谱检测的管控方案分析
无线电频谱探测技术主要是侦测无人机图传/遥控的无线电信号,具备探测精度高、环境适应性好、探测距离远、无电磁辐射等优点,同时对运动静止目标均能探测,能够定位飞控手位置,识别目标型号,精确引导干扰。对少数采用无线电静默模式飞行的无人机无法探测。无人机与地面遥控者的“沟通”是通过遥控系统和数传或图传系统进行的,遥控系统负责把操作者的指令传达给无人机,数传或图传系统把相机的取景画面、飞行数据等信息传给操作者,两个系统均采用不同频率的无线电信号进行传送。
2.1.3 基于雷达技术的管控方案分析
雷达技术是一种非常成熟的探测技术,具备的优势有探测距离远、定位较精确、反应速度快等,现阶段雷达可以侦测和识别的最小无人机目标范围在0.006平方米到0.01平方米。但由于无人机材料具有透波特性,雷达散射面积非常小,在悬停或慢速移动时,雷达难以识别,还无法辨认风筝、飞鸟和无人机的型号。随着无人机技术的提升,微型无人机越来越小型化,极小型的无人机会被雷达误认为噪声点而忽略掉。
2.2 反制角度下的管控系统方案分析
在反制方面,目前有采用硬杀伤、诱骗干扰技术及压制干扰技术。这三种手段各有优缺点详见表2。
2.2.1 基于硬杀伤技术的管控系统方案分析
硬杀伤手段包括高能激光、常规导弹、气压弹、激光武器、微波武器、格斗型无人机等。硬杀伤手段效果明显,但这些方式比较极端,运动瞄准困难,且实战瞄准精度要求高、造价昂贵,无人机被击毁后坠落可能会造成其他损失不可控,坠毁残骸可能对地面建筑和人群造成二次危害,所以使用热武器或激光炮直接摧毁无人机的方式在民用无人机行业几乎不可行。
2.2.2 基于诱骗干扰技术的管控系统方案分析
诱骗干扰技术即仿真发射虚假卫星导航信号,实现导航欺骗导致入侵无人机导航信息错误而偏离目标区域。诱骗干扰虽然发射功率小,但需24小时开启,诱骗信号会直接影响防护区域所有导航设备的正常使用,同时诱骗信号只对无人机导航信号有影响,对于遥控操作的无人机起不到管控作用。
2.2.3 基于压制干扰技术的管控系统方案分析
压制干扰技术是通过发射同频段电磁波信号,将无人机遥控信号(上行链路信号)以及导航信号淹没在干扰信号中,导致无人机无法接收遥控信号和导航信号,可使无人机产生缓慢下降或就地返航的效果,压制式干扰技术基本不会造成二次伤害,且效果明确,全天候适用,因其处置效果明显,处置时间短,对周边电磁环境影响较小,因此压制干扰技术是目前反无人机行业绝大部分厂家采用的管制手段。
3 无人机管控系统的工作原理
基于检测和反制角度下的无人机管控系统方案选取,我们将无人机管控系统分为指控分系统、探测分系统、处置分系统、通信分系统,各个系统采用分布式组网架构,起到良好的防护作用。本节将从无人机管控系统、系统架构以及系统工作流程进行详细分析。
3.1 系统组成
低空入侵检测防护系统集目标探测、跟踪识别、指挥控制、打击处置功能于一体,系统集成度高,适用性强,扩展性好,可不受气候条件限制全天候工作。完备的低空入侵检测防护系统主要由探测分系统、干扰处置分系统、指控分系统以及通信分系统四部分组成,可根据不同任务配置组合分系统设备应用于重点区域和大型活动的低空安防,系统形态可呈现为固定式、车载式及便携式,可有效应对随着低空空域开放及无人机广泛应用而日益增长的各类公共安全威胁。完备系统组成配置如表3所示。
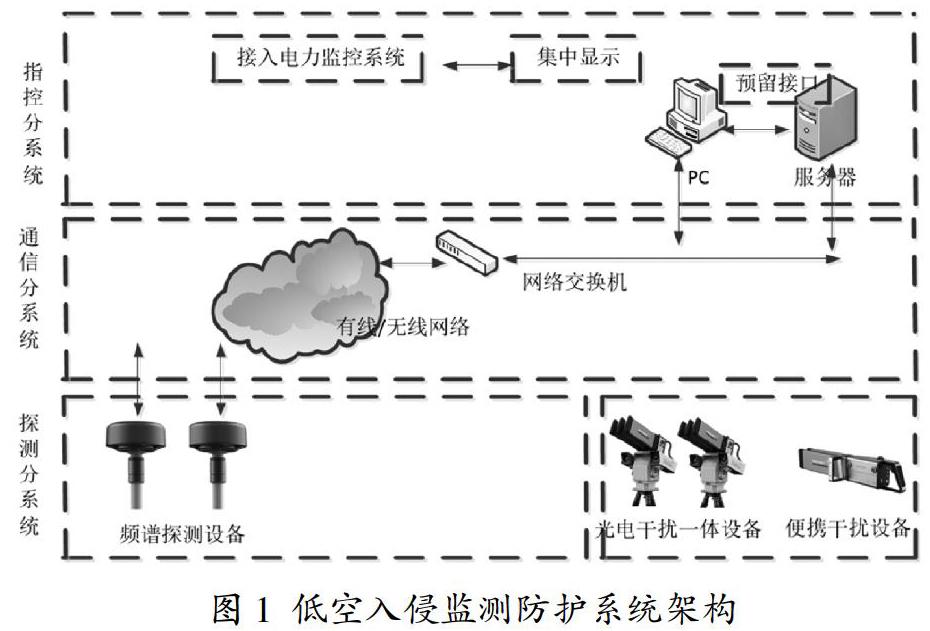
3.2 系统架构
察打一体反无人机系统采用分布式组网架构,通过全IP网络化部署实现低空广域覆盖,提供丰富的API开发接口实现地面安防监控系统无缝集成。低空入侵检测防护系统采架构如图1所示。
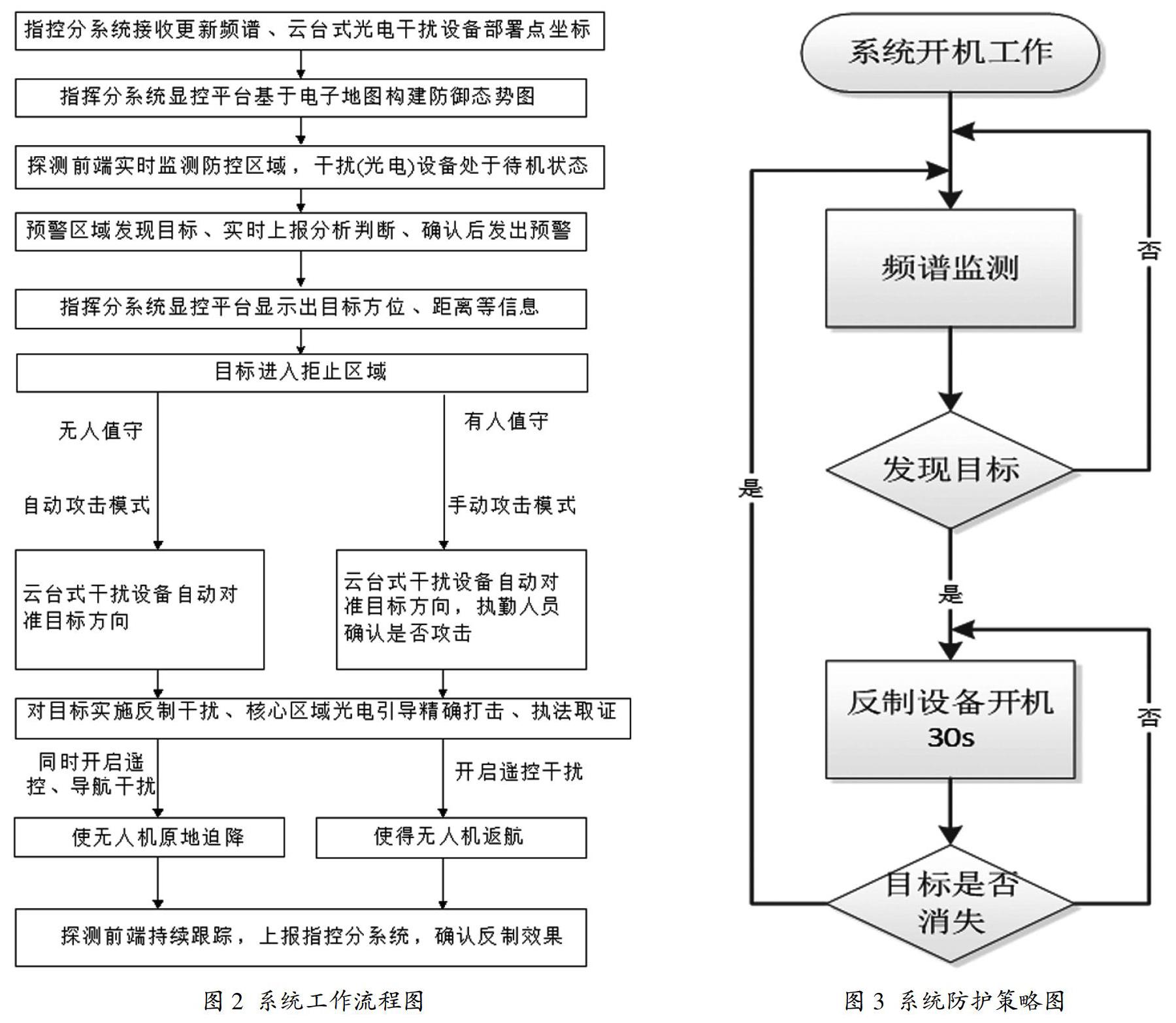
3.3 系统工作流程
系统构建的防御态势分为预警区域和拒止区域。在预警区域,探测前端发现识别入侵目标、雷达设备远距离探测发现区分目标、频谱设备基于分布式部署实现目标交叉定位,探测前端通过专网上报数据信息至指控分系统,指控分系统分析、解算及实时显示无人机频点、方位、距离等信息并启动入侵预警。当无人机进入拒止区域,指控分系统调动干扰处置分系统设备对入侵目标进行干扰处置,处置完成后,指控分系统调动探测前端确认处置结果。系统工作流程如图2所示。
4 管控系统的防护策略
无人机防护策略是设计无人机管控系统的重要环节,本系统采用完备的防护措施办法,以确保重要电力设施安全不受无人机困扰与威胁。本节内容就防护策略的基本原理、防护策略的基本流程、防护策略的基本方式来进行介绍。
4.1 防护策略的基本原理
对无人机的发现是无人机无线电管控的首要步骤,只有在准确发现、识别目标的基础上,才能有针对性地对目标无人机进行无线电管控。采用雷达探测和无线电监测等技术发现疑似无人机目标后,需要进一步通过视觉辨认、路径识别等技术对目标进行确认。确认为目标无人机后,下一步就是对目标的定位测向,以实现对目标企图的预测和持續追踪。可疑无人机被确定为管控目标无人机后,可采取物理摧毁、生物抓捕、无线电干扰等压制等手段使目标无人机无法继续工作。
4.2 防护策略的基本流程
系统防护策略如图3所示。系统工作过程中,频谱监测设备实时进行全空域扫描。当发现无人机频谱信号或无人机目标后,主控计算机开始实时跟踪无人机目标轨迹。当无人机进入系统设置的防护区域时,主控计算机向反制主机发送开机指令,反制主机开机一段固定时间。若开机结束后目标消失,主控计算机重新进入扫描状态。
4.3 防护策略的基本方式
反制设备的电磁频谱干扰策略存在以下三种常规方式:
(1)阻塞飞控
无人机失控,但有GPS信号的情况下,如果设定了自动返航,将会自动上升到提前设定的返航高度,通过GPS信号返航到起飞地点自动降落;如果未设定自动返航,无人机将会悬停或缓降。工作频率一般为2.4GHz和5.8GHz,部分无人机选用900MHz。
(2)阻塞GPS(含北斗,GLONASS)
无人机飞控正常,GPS信号不正常,无人机将会进行手动模式操控无人机,无人机姿态将会左右摆动,不稳定,但可以通过遥控器控制。工作频率一般为1.15-1.65GHz。
(3)阻塞飞控&GPS
无人机失控,GPS信号也不正常的情况下,无人机将会失去控制,并且姿态左右摆动,或朝某方向直飞,或缓降,或直接坠毁。
由于220kV云栖变电站内有GPS对时设备,在阻塞无人机GPS信号的同时可能会影响到对时设备的正常工作。因此,反制动作拟采用阻塞飞控的手段,迫使无人机返航或悬停。
参考文献:
[1]中国民用航空局飞行标准司.轻小无人机运行规定(试行)[Z].2015-12-29.
[2]房建成.高性能微小型导航、制导与控制器件及系统集成技术研究报告[R].北京:北京航空航天大学,2006.
[3]吴刚,周斌,杨连康.国内外民用无人机行业发展回顾与展望[J].经济研究导刊,2016(12):160-162.
[4]徐德明.中国地理信息产业发展报告(2011)[M].北京:社会科学文献出版社,2011.
[5]莫桂洋.浅谈无人值守变电站的运行管理和探索[J].山东工业技术,2019(10):182.
[6]易际娟,陈美红,王亚萍.浅谈民用无人机监管的制度困境与路径选择[J].法制与经济,2018(11):72-74.
[7]王铮.无人机光电探测系统被动目标定位技术研究[J].科技资讯,2018,16(23):81-83.
