印度月船-2探测器落月失利
2019-12-19张扬眉北京空间科技信息研究所
张扬眉(北京空间科技信息研究所)
印度标准时间2019年9月7日01:38(北京时间2019年9月7日04:08),印度月船-2(Chandrayaan-2)探测器携带的“维克拉姆”(Vikram)着陆器开始进入动力下降阶段,尝试进行月球表面软着陆,但在距离月面约2.1km处失去联系。目前,印度称已经利用轨道器完成了对着陆器的定位和热成像,还在尝试与其建立通信连接。但由于失联时高度和速度较高,着陆器撞击月球表面的速度至少为每秒数十米,恐已完全坠毁,印度的首次落月尝试以失利告终。
1 月船-2着陆事故相关情况
着陆事故详情
印度标准时间2019年9月7日01:38,“维克拉姆”着陆器进入最终的15min动力下降阶段,但约13min后在距离月球表面2.1km处,“维克拉姆”与地面失去联系。
来自印度空间研究组织(ISRO)的现场直播显示,着陆器按计划从36km×110km轨道下降至距离月表6km以下高度处,已经进入精确制动阶段。之后,说明着陆器下降轨迹的画面在抵达月面前停止。几分钟的沉默之后,ISRO主席斯万(Sivan)宣布与着陆器的通信丢失。斯万称着陆器下降过程按照计划进行,直到2.1km高度处性能都保持正常,但之后着陆器与地面失去了联系,目前正在分析数据。
ISRO在月船-2着陆后发布消息,称月船-2是一项高度复杂的任务,目前轨道器正在既定轨道上运行并将开展长达7年的探测活动,其携带的相机是目前探月任务中分辨率最高的(0.3m);“维克拉姆”着陆器顺利完成从35~2km的下降,失联前系统工作正常,证明了包括变推力发动机技术在内的大量新技术。成功标准是针对任务的每个阶段确定的,直到目前月船-2任务已经完成了90%~95%的目标,并将继续为月球科学做出贡献。
ISRO正在对相关通信数据和传感器数据进行分析,以找出着陆器通信突然中断的原因,后续详情有待公布。9月8日,斯万再度发表声明,称ISRO已经确定失联的着陆器位置,并获取了着陆器的热成像图,但现阶段仍无法掌握其实际运行状态,且依然无法与着陆器建立通信连接。

即将发射的地球同步轨道卫星运载火箭—Mk3
任务飞行历程
印度标准时间2019年7月22日14:43,月船-2探测器在萨迪什·达万航天中心(SDSC)搭乘地球同步轨道卫星运载火箭-Mk3(GSLV-Mk3)成功发射,与火箭分离后进入约170km×40000km的停泊轨道。随后,通过多次机动,于8月14日进入月球转移轨道。
8月20日,月船-2实施月球轨道插入进动,进入月球大椭圆轨道。之后,月船-2通过4次轨道机动,于9月1日进入119km×127km的月球轨道。
9月2日,“维克拉姆”着陆器与轨道器分离,并分别于9月3日和4日实施两次轨道机动,进入36km×110km的轨道,轨道器则继续停留在约100km高的轨道上运行。9月7日,着陆器开始登月尝试。
计划着陆过程
按计划,“维克拉姆”着陆器将于9月7日利用反推发动机实施持续15min的动力下降,按照预先编程的下降序列,其标称着陆过程:着陆器携带的4个可变推力液体燃料发动机点火11min,将着陆器降低至距月面7.4km的高度,完成“粗略制动阶段”并进入“精确制动阶段”;之后启用激光高度计和危险规避相机对月面进行扫描,为着陆器的导航计算机提供输入,以控制下降速率;在抵达距月面100m高时,着陆器将进行短暂悬停,在其敏感器确认着陆地点安全、平整且没有障碍物之后,进入最终着陆阶段;在距月面13m高时,着陆器的中心发动机将点火,以控制着陆的最后几秒,这项措施旨在减少着陆器在着陆时溅起的月球尘埃。
着陆地点位于月球71°(S)的曼济纳斯C(Manzinus C)与辛普路斯N(Simpelius N)环形山之间的高原上,该地点距离南极艾特肯盆地(Aitken basin)约350km。着陆器有两个可选着陆点,即首选着陆地点(SLS54,70.90267S,22.78110E)和备选着陆地点(ALS01,67.874064S,18.46947W),着陆椭圆为15km×8km。着陆后,月球车驶出,在月球表面进行1个月昼的探测。

月船-2飞行轨迹图
2 任务背景
早在2007年11月,印度ISRO与原俄罗斯联邦航天局(ROSCOSMOS,现俄罗斯航天国家集团)就签署了月船-2项目的合作协议。根据该协议,印度将负责研制月船-2轨道器和月球车,俄罗斯则负责提供着陆器。
自印度首个月球探测器—月船-1于2008年10月发射以来,印度继续致力于新的月球探测任务的研发,原计划于2014年发射月船-2,但因2011年俄罗斯“福布斯-土壤”(Phobos-Grunt)任务发射失利,俄罗斯从2012年开始对在研的所有空间探测项目进行重新审查与改进,因此月船-2的发射时间被延迟至2016-2017年。此外,俄罗斯还表示在2015年前都无法向印度交付着陆器。为此,2013年8月,印度宣布独立实施月船-2任务,自行研制轨道器、着陆器和月球车。
鉴于印度第二次探月任务的推迟已不可避免,印度当时将研发队伍、时间与资源投入到火星探测器的研制上,并于2013年11月成功发射了“曼加里安”(Mangalyaan)火星轨道器,目前其仍在轨运行。
之后,在月船-2的研制过程中,印度又数次推迟了发射时间。2019年6月12日,印度正式宣布将于7月15日前发射月船-2,并预计于9月6日着陆月球表面。
3 任务目标
印度于2008年发射的月船-1任务,通过美国国家航空航天局(NASA)提供的月球矿物学绘制仪(M3)和ISRO研制的月球撞击探测器(MIP),在月球南极表面的永久阴影区域发现了水。
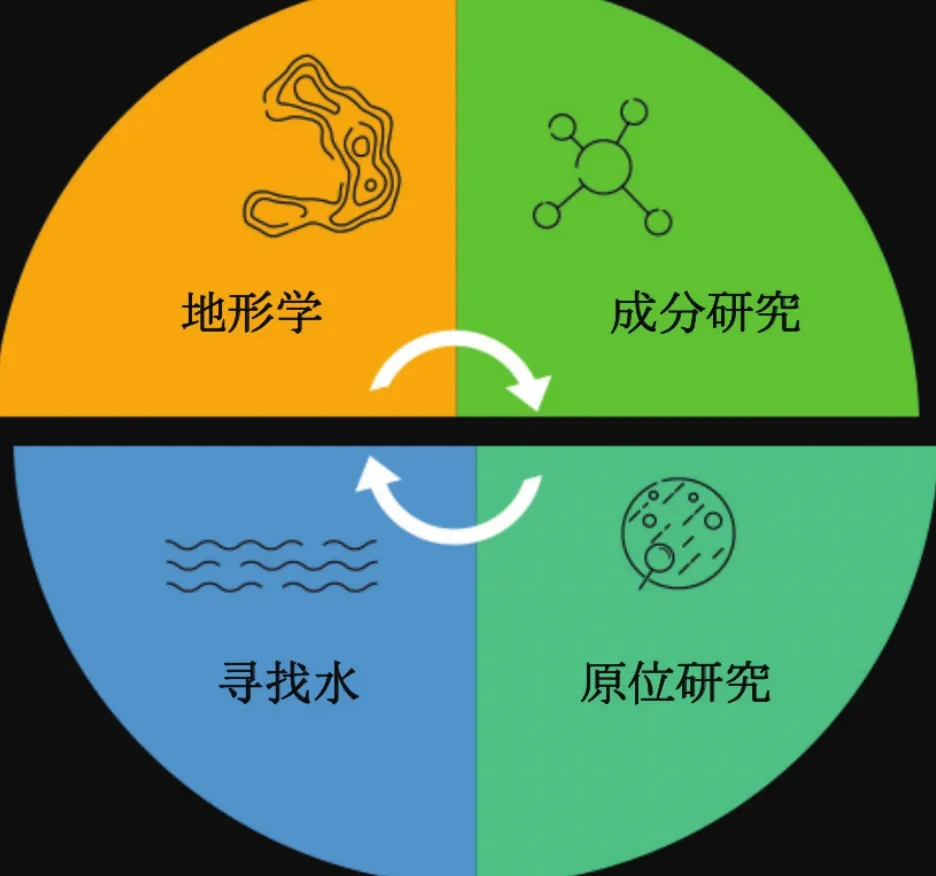
月船-2任务的探测目标
月船-2任务将进一步确认月船-1的上述科学发现,在月球南极附近区域软着陆并进行巡视探测,探测月球地形、矿物分布、元素丰度、月球外大气层、水冰等。轨道器将绘制月球表面地图,研究月球南极水冰的情况以及月壤厚度等。月船-2的主要任务目标如下:
1)实现印度月球探测器在月面特定地点的软着陆,实现月面巡视探测,在月面分析月壤样品化学成分,研究月球的起源和演化;
2)通过轨道器上携带的比月船-1更为先进的科学载荷,增强月球科学数据获取能力,以及对月船-1的观测数据进行核实和验证;
3)通过月船-2任务的实施验证多项新技术,包括未来月球采样返回任务所需的技术和用于未来行星探测任务的技术。
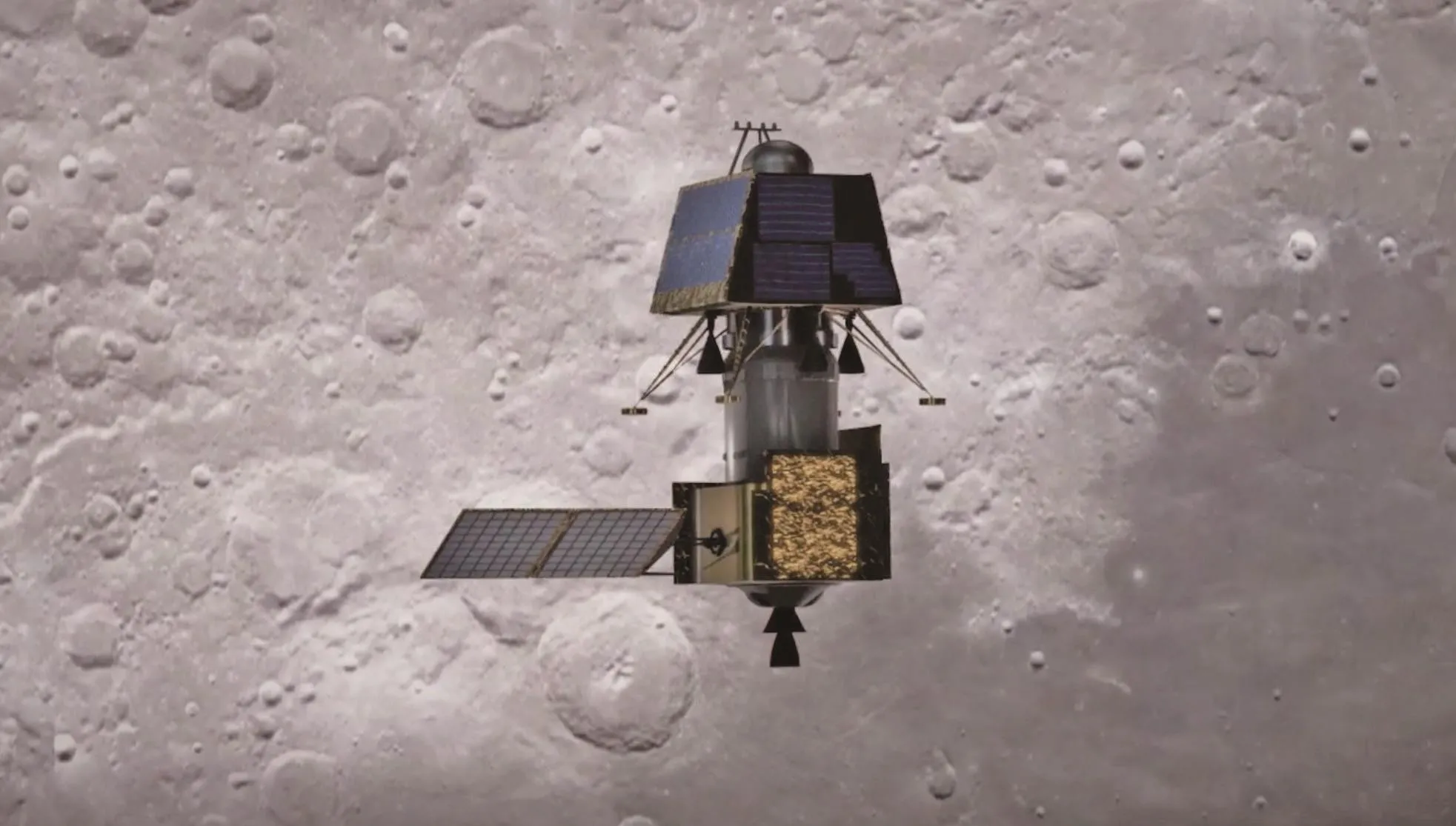
月船-2探测器巡航构型图
4 系统组成
月船-2由轨道器、“维克拉姆”着陆器和“普拉里安”(Pragyan)月球车组成,发射质量为3850kg,总干质量1308kg,尺寸3.1m×3.1m×5.8m。其中,轨道器发射质量2379kg,着陆器发射质量1471kg(包括27kg的月球车)。整个月船-2探测器由印度自主研发。截至2019年6月底,印度宣称月船-2项目成本为1.41亿美元(97.8亿卢比),其中包括0.54亿美元(37.5亿卢比)的发射费用。
轨道器
月船-2轨道器的基本结构与月船-1相似,干质量682kg,燃料质量1697kg,尺寸3.2m×5.8m×2.1m。三轴稳定,主推进采用双组元推进系统。电源采用单太阳电池翼,电源功率为1000W。通信采用X/S频段,装备X频段抛物面天线。轨道器可与印度深空网和着陆器进行通信。轨道器将在高100km的月球极轨道上运行,设计寿命为1年(目前ISRO宣布将轨道器工作时间延长到7年)。

月船-2轨道器
月船-2月球车“普拉里安”

月船-2着陆器“维克拉姆”
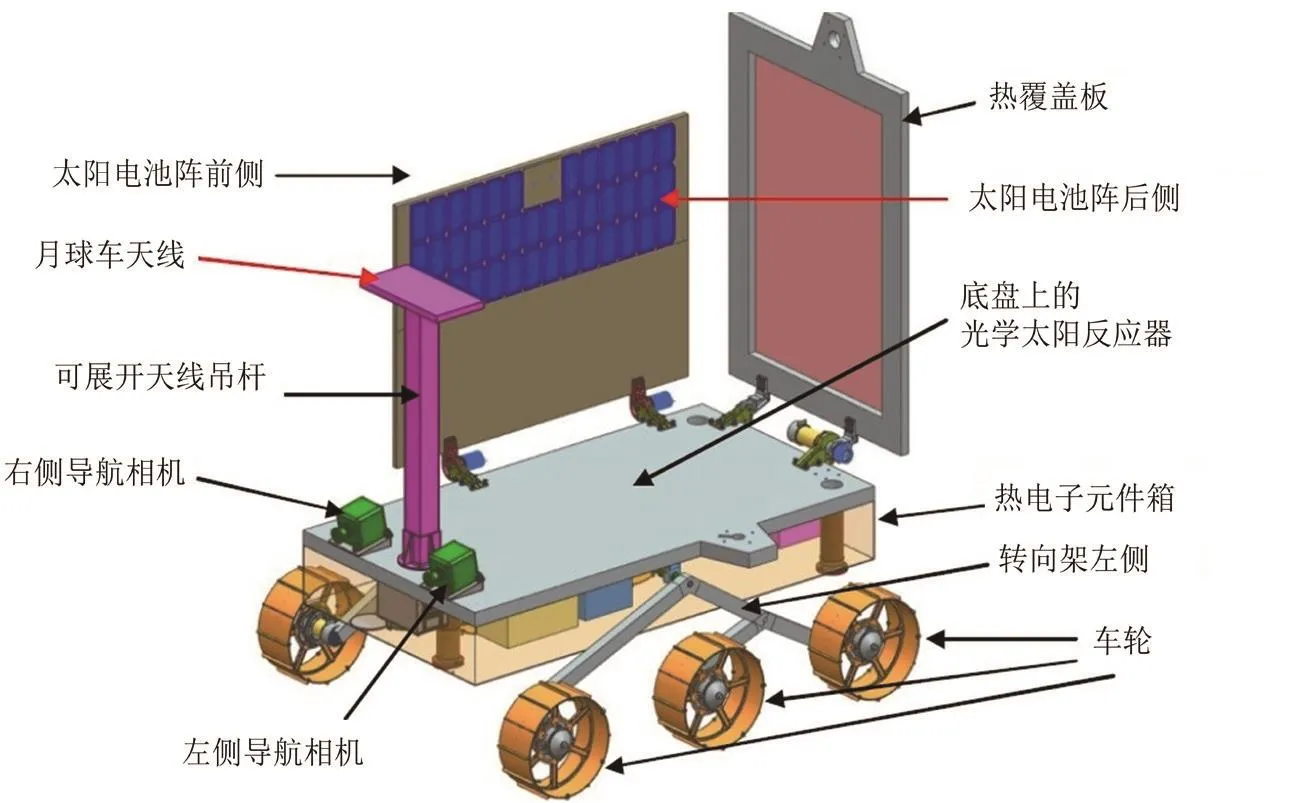
月船-2月球车结构图
着陆器
月船-2着陆器被命名为“维克拉姆”,以纪念1971年去世的、被赞誉为“印度航天计划之父”的科学家维克拉姆·萨拉巴伊(Vikram Sarabhai)。着陆器为梯形六面体结构,干质量626kg,燃料质量845kg,尺寸2.54m×2m×1.2m,带有4个着陆支架腿,设计寿命为1个月昼(14个地球日)。着陆器配备5个800N主发动机和8个用于姿态控制的50N推力器。太阳电池阵功率为650W。着陆器可与印度深空网、轨道器和月球车进行通信。
月球车
月船-2携带的月球车被命名为“普拉里安”,在梵语中意为“智慧”。发射质量27kg,尺寸0.9m×0.75m×0.85m,电源功率50W。六轮移动底盘结构,其中4个轮子具有独立转向能力。月球车采用太阳电池阵供电,装备了移动行走系统、导航相机和控制系统。月球车的行驶速度约1cm/s,将在月面工作1个月昼(14个地球日),计划行驶约500m。月球车可直接与着陆器进行通信。
月船-2研究团队为月球车开发了3个关键子系统,一是基于3D成像的立体相机系统,用于为地面操控人员提供控制月球车移动所需的周围地表3D图像;二是“动态牵引力控制系统”,通过控制月球车4个轮子的独立转向装置,确保月球车能够穿越粗糙的月球表面;三是月球车控制及电机系统,6个轮子均由独立的电机驱动,其中4个轮子具有独立转向能力,共有10个电机用于牵引和转向。
有效载荷
月船-2一共携带了13种有效载荷,将对月球南极附近区域的地形、矿物分布、月壤组成、月震活动、月球大气、月球电离层等进行全方位的探测。此外,还将进一步寻找水冰。
轨道器携带了8种有效载荷:地形测绘相机-2、月船-2大面积软X射线光谱仪、太阳X射线监测仪、红外成像光谱仪、双频段合成孔径雷达、轨道器高分辨率相机、月船-2大气成分探测器-2、双频无线电实验,其中两种是在月船-1上飞行过的仪器的改进版。轨道器携带的高分辨率相机将在轨道器与着陆器分离前对预定的着陆区域进行高分辨率成像。
着陆器携带了3种有效载荷:月球边界超灵敏电离层和大气无线电分析、月船-2表面热物理学实验、月震活动监测仪。此外,着陆器还携带了由美国NASA提供的激光后向反射器阵列(LRA),用于地月系统动力学和月球内部的被动实验研究。
月球车携带了2种有效载荷:α粒子X射线分光计、激光诱导分解分光镜。
5 月船-2着陆失利原因浅析
月船-2任务在着陆过程中失联,很有可能已经坠毁于月球表面。一些文章分析称,着陆器在着陆过程中失联的可能原因是安装在着陆器一侧的4个小型转向发动机突然失灵并全部停止工作,导致着陆器无法保持正常姿态。着陆器如果失联后无法保持预定姿态,将导致着陆器高速撞击月球表面,大概率将会坠毁,但ISRO尚未明确给出任务失利或探测器坠毁的公告,仅称着陆器失联,以弱化事故。ISRO正在开展失联原因的调查,并且尝试与其重新建立联系。
在官方公布事故原因前,无法获知具体事故的原因,但可以从当前获取的一些信息中探析这次着陆事故的可能影响因素,包括着陆任务难度大、任务可靠性低,以及推进系统能力不足等。
月球软着陆难度大、成功率低
尽管月球软着陆不及火星软着陆的难度大,但在短短10余分钟内从数十千米高度安全降落到月球预选着陆区,在通信延迟的情况下对于自主控制方面有很高的要求,是当前深空探测任务中难度极大的一步。月球软着陆过程中,每一个技术环节都不能出现分毫偏差,要实时测量探测器运动的速度、高度,并随时进行调整。月面的地形地貌也非常复杂,探测器必须自主寻找安全的着陆点等。斯万称月船-2是“ISRO有史以来实施的最为复杂的航天任务”,并将其最终的动力下降阶段称为“恐怖15分钟”。
苏联和美国在首次成功着陆月球前也经历了多次失败。在国外实施的月球软着陆、巡视和采样返回任务中,苏联共实施了29次月球软着陆任务,完全成功仅7次,成功率仅为24.1%,大部分任务在发射和飞行过程中即遭失败,5次任务在着陆过程中由于反推发动机过早关机、通信系统故障等原因而遭遇失败。美国共实施7次月球软着陆任务,完全成功5次,其勘测者-2(Surveyor-2)在中途修正过程中,游标发动机点火失败导致推力不均匀,造成探测器颠簸,最终与地球失去联系并坠毁于月球;而勘测者-4在着陆前3分钟遥测信号突然中断,最终撞击月球坠毁。
任务均忽视科学探测而强调政治目的,获得成果较少
印度深空探测任务以追求政治目的为主,过度强调工程目标的达成,而忽略科学目标。例如,“曼加里安”以实现印度首次火星环绕探测的工程目标为主,不重视科学目标,只携带了象征意义的15kg有效载荷,节省了在有效载荷研发上的高昂成本,也降低了整个探测器的质量和性能要求,加快了研制进度,大幅降低了任务成本,然而对火星科学探测的贡献相当有限。从效费比的角度看,该任务虽然成功,但也并不“便宜”。印度已经实施的月船-1和“曼加里安”,除实现了印度首次月球和火星探测之外,并未获得引人关注的科学探测成果。月船-2同样强调一次实现“绕、落、巡”的工程目标,且一直被印度总理莫迪作为推动经济改革、谋求连任的有力筹码之一,政治意图明显。月船-2的着陆器和月球车仅能在月面工作1个月昼,其科学探测能力有限。
为实现低成本而舍弃对高可靠性的追求,任务风险较大
传统的政府航天任务可接受的风险极低,对可靠性的要求很高,往往探测器具备冗余系统并经过多轮地面测试,以保证高可靠性,进而增加了任务成本。
而印度以最低的成本完成深空探测任务,不惜以牺牲冗余度和可靠性为代价。印度开展的3次深空探测任务成本均远低于世界平均水平,其中月船-1总成本1亿美元,月船-2总成本1.41亿美元,“曼加里安”总成本7400万美元。对比技术能力更强的美国,2000年以后开展的数次月球环绕探测任务,总成本均在2亿~5亿美元,与“曼加里安”同期开展的“火星大气与挥发物演变”(MAVEN)火星轨道器任务成本为6.71亿美元。但深究其节省成本的原因可以发现,印度实施低成本深空探测任务是以牺牲科学探测目标和任务可靠性等为代价的。例如,“曼加里安”任务在研发过程中简化了试验流程,节省了研制费用,加快了研制进度,但大幅度增加了任务的风险;月船-1探测器虽然成功实现绕月探测,但探测器可靠性较低,原计划执行为期2年的任务,实际仅在轨运行约300天,就因故障与地面失去联系。此外,2019年4月在月面坠毁的以色列“创世纪”(Beresheet)月球着陆器,也是为降低项目成本(总成本约1亿美元)采取了低投入模式,牺牲了探测器性能、有效载荷能力,以及系统可靠性等对深空探测任务意义重大的关键要素,探测器仅能在月面生存约2天,同时几乎所有的星上设备都没有备份,一旦出现故障将导致整个任务失利。最终,“创世纪”在着陆过程中因主发动机故障在月球表面坠毁。
忽略深空探测任务的技术牵引作用,技术基础薄弱
深空探测任务的重大效益之一是可以引领国内前沿高新技术的跨越式发展,鼓励科技创新,推动航天运载、通信、遥测、材料、能源、高端装备制造等技术的快速发展,并以高新技术推动经济发展方式的转变,创造可观的经济和社会效益。美国始终在科学探测方面保持高投入,不仅因为其高度重视科学探测意义和政治影响,更是因为看重前沿任务带来的技术牵引作用。至今,美国仍在享受“阿波罗”(Apollo)计划带来的效益,而不惜花费近百亿美元的资金建造“詹姆斯-韦伯空间望远镜”(JWST),也是其重视相关光学观测技术发展的体现。而印度在实施深空探测任务的过程中,为压缩成本,不注重引领技术发展,月船-2轨道器是在原有通信卫星平台基础上改进而来,深空通信则借助于美欧深空通信网的能力,并且月船-2任务也没有发展出大推力可变推力发动机。由于缺少大推力可变推力发动机,月船-2着陆器携带了5个800N的可变推力发动机,也在一定程度上降低了任务的可靠性。印度前两次深空探测任务的实施也并未带来相关前沿技术的快速发展和基础设施的建立。
此外,关于具体失败原因,有推测是反推发动机推力控制失灵,也有推测是姿控发动机失控,引发了姿态翻转,造成了着陆器失联,真实原因只能等待官方的调查结果。但此次月船-2着陆器失联,不论是反推发动机还是姿控发动机失控造成姿态翻滚,亦或是其他原因,都可以归结为其技术能力不足且在任务可靠性方面重视不够,过分追求任务低成本而引发的,值得我们引以为戒。
